

Вопрос 1
- понятие управления (как мы изменяем действительность).
4. Управление.
Управление - целенаправленное воздействие на систему.
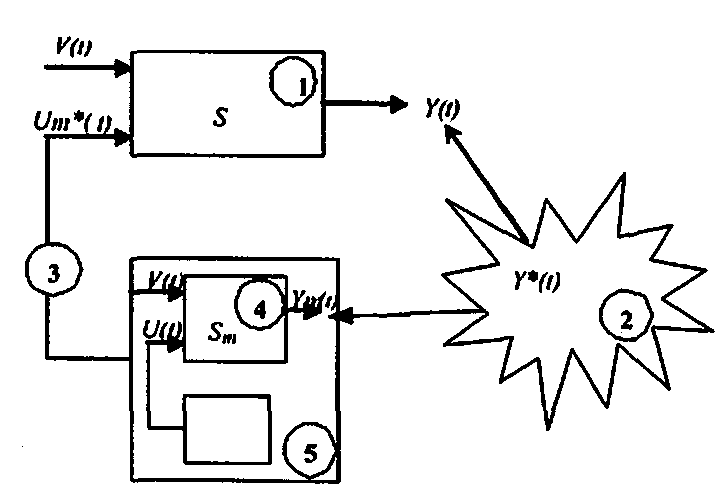
S – система.
Sm – модель системы.
Y(t) - выходы системы.
U(t) - управляемые извне входы системы.
V(t) - неуправляемые, но наблюдаемые входы системы.
Выходы Y(t) являются результатом преобразования системой S входов V(t) и U(t):
Y(t)=S[V(t), U(t)],
что позволяет воздействовать на Y(t) путем выбора различных управлений U(t).
Приведенная символика верна только для безынерционных систем.
Компоненты управления:
1. Объект управления (управляемая система) - S.
2. Цель управления. В понятие цели входит не только конечное желаемое состояние системы (T*, Y*), но и весь желаемый путь к ней Y*(t).
3. Управляющее воздействие - U(t).
Чтобы узнать существует ли, и если да, то каково управляющее воздействие, нужно решить уравнение
Y*(t)=S[V(t), U*(t)]
относительно U*(t). В этом уравнении известны Y*(t) (задано) и V(t) (наблюдаемо), но оператор S обычно неизвестен, что делает задачу неразрешимой. Выход все равно надо искать, и это приводит к двум типам управления:
- поиск нужного воздействия U*(t) путем перебора воздействий на самой системе S (метод тыка). Чаще такой способ управления является неразумным по ряду причин. Например, множество возможных U(t) может быть настолько большим (и даже бесконечным), что надеяться на случайное удачное попадание нереально. Другая важная причина - высокие потери при неверном решении;
- поиск нужного воздействия U*(t), осуществляемый не на самой системе, а на ее модели.
4. Модель системы – Sm.
Y*(t)=Sm[V(t), Um*(t)]
5. Блок управления (управляющее устройство) - система (подсистема) управления. Блок управления может быть подсистемой управляемой системы, но может быть и внешней системой.
Таким образом, два первых обязательных шага процесса управления это:
1. Найти на модели системы нужное управляющее воздействие Um*(t). На этапе поиска управления нам придется считать наилучшим то управление Um*(t), которое максимально приблизит к Y*(t) выход модели Ym(t);
2. Исполнить это воздействие на системе. После подачи на управляемый вход системы найденного воздействия Um*(t) система выдаст некоторый выходной процесс Y(t):
Y(t)=S[V(t), Um*(t)],
являющийся преобразованием входов оператором системы S. При этом возможны различные исходы, требующие различных действий по управлению системой. Это и порождает различные типы управления:
1. Управление простой системой (программное управление). Это самый желательный случай: подача на вход системы S воздействия Um*(t), обеспечивающего цель Y*(t) на выходе модели Sm, приводит к такому же результату и на выходе управляемой системы S.
Такую систему S будем называть простой. Простота системы есть следствие адекватности модели.
Управляющее воздействие Um*(t) в этом случае называется программой.
Примеры: исправные бытовые приборы, различные автоматы, компьютеры, стрелковое оружие и т.д.
2. Управление сложной системой (метод проб и ошибок). Противоположный вариант: когда на найденное на модели управляющее воздействие Um*(t) система откликается вовсе на так, как модель, Y(t) не совпадает с Y*(t).
Будем называть такую систему сложной (в смысле недостаточности информации об управляемом объекте). Причиной сложности системы при таком подходе оказывается неадекватность ее модели Sm.
Управление сложной системой сводится к добыванию недостающей информации о системе и последующему использованию этой информации для очередного акта управления.
Если при построении модели Sm мы использовали всю доступную информацию о системе, то единственным источником информации остается только сама система и единственным способом извлечения этой информации является эксперимент с системой.
Алгоритм управления сложной системой таков:
- на текущей, имеющейся на данный i-й момент времени, модели Smi системы S отыскивается некоторым методом управляющее воздействие Umi*(t), которое обеспечивает получение целевой функции Y*(t) на выходе этой модели;
- найденное воздействие Umi*(t) подается на управляемый вход системы S.
- наблюдается и фиксируется выход системы Yi(t).
- при расхождении Yi(t) и Y*(t) производится коррекция модели (за счет ее варьируемых параметров) так, чтобы исправленная модель Smi+1 как можно точнее повторяла на своем выходе Ymi+1(t) отклик системы Yi(t).
- возврат к пункту 1 (i → i + 1).
Особенности алгоритма управления сложной системой:
- алгоритм имеет циклический характер. С каждым циклом Sm становится более адекватной, что повышает эффективность управления, уменьшает сложность системы. В некоторых случаях удается сложную систему превратить в простую за конечное число шагов. Но есть системы, сложность которых человечеству не удается исчерпать, несмотря на все старания (природа, общество, экономика, мышление и т.д.). Это не значит, что их изучение напрасно, оно просто бесконечно. Их иногда называют очень сложными системами;
- поскольку на каждом шаге будет получаться "не совсем цель Y*(t)", мы при этом понесем потери. Минимизировать неизбежные потери при управлении сложной системой можно, лишь полностью используя полученную в очередном эксперименте (шаге управления) информацию;
Такой алгоритм управления сложной системой получил название метода проб и ошибок. Каждое очередное управляющее воздействие стали именуется пробным воздействием или просто пробой, а расхождение между Yi(t) и Y*(t) - ошибкой.
Кардинальное различие между методом проб и ошибок и методом тыка заключается в том, что нужное воздействие ищется не на самой системе (это и есть метод тыка), а на модели системы, корректируемой по ходу управления.
3. Управление по параметрам (регулирование). Это промежуточный между первыми двумя случай. Подав Um*(t), мы можем наблюдать, что поначалу система идет по желаемой траектории Y*(t), но через некоторое время обнаруживается расхождение между Y(t) и Y*(t). В таком случае часто оказывается, что внесение поправок в модель нецелесообразно и необходимо внесение изменений в саму систему.
Первая возможность – изменение параметров системы, не изменяя ее структуры. Параметр изменяется так, чтобы система вернулась на целевую траекторию, и при дальнейших отклонениях Y(t) от Y*(t) это действие повторяется (например, изменение положения руля при вождении автомобиля).
Для реализации этого типа управления нужно выполнять следующие функции:
- держать в памяти опорную траекторию Y*(t);
- следить за реальной траекторией Y(t);
- обнаруживать текущее различие между Y(t) и Y*(t);
- вырабатывать, определять, вычислять корректирующее, дополнительное к Um*(t), воздействие на параметры системы;
- исполнять это действие на системе, возвращая ее на опорную траекторию.
Регулятор – специальное устройство, созданное для выполнения этих функций. Причем место, где физически будут исполняться данные функции, зависит от обстоятельств (внутри управляющей системы, внутри управляемой системы или же вне их обеих). Сам метод получил название регулирования.
Регулирование называют управлением с обратной отрицательной связью, подчеркивая стремление уменьшить отклонение от опорной траектории.
Для осуществления регулирования необходимо, чтобы система отклонялась от опорной траектории не слишком быстро и не слишком далеко – так, чтобы за счет изменения параметров можно было ее возвратить на целевую траекторию Y*(t).
4. Управление по структуре. Применяется когда система так быстро и далеко отклоняется от целевой траектории, что не может быть возвращена на нее изменением параметров.
Решение в данном случае состоит в создании новой системы путем изменения ее структуры и надежде на то, что удастся достичь поставленной цели хотя бы и по другой траектории (реорганизация, хирургическая операция и т.д.).
5. Управление по целям. В данной ситуации никакое использование имеющихся ограниченных средств не может реализовать желаемое состояние: данная цель в данных условиях недостижима. Остается сменить цель, понизив уровень притязаний, переориентироваться на достижимые сроки и/или другие параметры конечного состояния.
Можно различать цели, недостижимые в принципе. Обнаружение недостижимости некоторых таких целей является основанием отказаться от стремления к ним. Существуют цели, недостижимые в одних условиях, но достижимые в других; есть цели, достижимость которых желательна, но не доказана, хотя и не опровергнута и т.д. Однако определить, с каким именно из вариантов мы столкнулись, в некоторых случаях не является простым делом.
6. Управление большими системами (управление при дефиците времени). В данном случае фактором, влияющим на качество управления и требующим нового способа управления, является своевременность управляющего воздействия: по истечении этого времени управление теряет смысл.
Систему, для нахождения оптимального воздействия на которую достаточно информационного ресурса (модель адекватна), но недостаточно времени, будем называть большой системой, в противном случае - малой. Таким образом, причиной того, что система оказывается большой, является не сама величина, громоздкость системы, а недостаточная скорость перебора и сравнения на модели вариантов управления, т.е. дефицит времени.
Способы управления большой системой:
- превращение большой системы в малую, что позволяет ускорить процесс моделирования (замена моделирующего компьютера более быстродействующим, делегирование своих полномочия помощникам и т.д.);
- отказ от ожидания получения оптимального варианта и принятие первого получившегося удовлетворительного.
7. Управление при отсутствии информации о конечной цели.
Способы управления в данном случае:
- установить субъективное, априорное определение конечной цели, а дальше действовать по предыдущим схемам. Такой способ характерен для управления крупными социальными системами. При этом любая социальная идеология, утверждающая свое видение конечной цели, на самом деле предлагает гипотезу, истинность которой является вопросом веры в нее и последующей проверки на практике;
- определить траекторию продвижения к неизвестной, но существующей конечной цели. Данная траектория тоже неизвестна, но можно пытаться исследовать ближайшую окрестность вокруг текущего состояния и определить наиболее предпочтительное направление следующего шага в пределах этой окрестности. Затем сделать этот шаг и действовать в дальнейшем так же. Такой способ реализуется в самых различных областях (эволюция и естественный отбор в биологии и т.д.).
Приведенная классификация типов управления не может быть абсолютной и универсальной. Являясь моделью, она упрощенно описывает разнообразие реальных вариантов управления. В жизни могут встречаться случаи, когда в управлении одной системой используются одновременно или поочередно сочетания разных типов управления.
С другой стороны, являясь моделью, данная классификация имеет целевой характер и для других целей могут потребоваться другие классификации. Например, в некоторых случаях различают автоматическое, полуавтоматическое (автоматизированное) и ручное управление и т.д.
Вопрос №2