

umk-teoriya-mehanizmov
.pdf9.3. Плакаты
9.3.1.Кинематические пары.
9.3.2.Виды зубчатых механизмов.
9.3.3.Червячная передача.
9.3.4.Сведения по производительности машин.
9.3.5.Выбор электродвигателя.
9.3.6.Виды механизмов.
9.3.7.Изготовление зубчатых колес.
9.3.8.Эвольвентное зацепление.
9.3.9.Кинематические характеристики рычажных механизмов.
9.3.10.Стенд «Курсовое проектирование по ТММ и М».
9.3.11.Схемы манипуляторов.
9.3.12.Сборник типовых аналогов машин.
9.4. Методические указания и пособия
9.4.1.Типовой лабораторный практикум по ТММ / Э. А. Горов и др. – М. : Машиностроение, 1990.
9.4.2.Лабораторные работы по ТММ / под ред. Е. А. Камцева. – Минск : Высш. шк., 1976.
9.4.3.Коренский, В. Ф., Кривенок, В. К. Теория механизмов и машин : Лабораторный практикум для студ. спец. 36.01.01, 36.01.03, 36. 01.04, 36.07.01, 70.05.01. – Новополоцк : Изд. ПГУ, 2004.
9.4.4.Курсовое проектирование по ТММ / под ред. Г. Н. Девойно. – Минск : Высш. шк., 1987.
9.4.5.Методические указания к курсовому проектированию по дисциплине ТММ / сост. В. Ф. Коренский. – Новополоцк : ПГУ, 1995.
9.4.6.Василенко, Д. Л. Кинематика передаточного механизма. Мате- риалы республиканской конференции студентов и аспирантов Беларуси / Д. Л. Василенко. – Витебск : ВГТУ, 2002.
9.4.7.Комплект задач по ТММ – разработка кафедры.
9.5. Учебные кинофильмы
9.5.1.Промышленные роботы.
9.5.2.Микропроцессорные системы управления роботами.
9.5.3.Кинематика и динамика роботов и манипуляторов.
11
БАЗОВЫЙ КОНСПЕКТ ЛЕКЦИЙ
1.ОБЩИЕ СВЕДЕНИЯ О МАШИНАХ
1.1.Машины. Требования к машинам. Задачи курса ТММ и М
Курс ТММ и М посвящен теоретическим основам машиноведения, теории проектирования машин и механизмов (в системе ЕСКД) и теории их эксплуатации.
Машина – техническое устройство, выполняющее механические движения для преобразования энергии, материалов и информации с целью замены или облегчения физического и умственного труда человека, повы- шения его производительности.
Основной отличительный элемент машин (от других устройств) – это преимущественное использование механических движений. Механиче- ские движения выполняются твердыми телами. В связи с этим машины со- стоят преимущественно из твердых тел.
Требования к машинам разнообразны: минимум энергопотребления, малая масса, малые габариты, дизайн, высокая надежность и долговеч- ность. Важнейшие же требования, ради которых машины создаются и раз- виваются – производительность и качество выпускаемой продукции.
Производительность характеризует возможности производства насы- щать рынок. Качество определяет потребительские свойства выпускаемой продукции – возможность соответствовать моде и ГОСТ. Таким образом, общественная, постоянно меняющаяся мода – важнейший стимул развития и совершенствования новых машин. Развитие осуществляется путем проведе- ния новых исследований в различных областях науки и техники, своевремен- ного внедрения этих исследований в промышленное производство.
На заре развития машин они являлись вымыслом одиночек- изобретателей (ткацкий станок, паровая машина и т.п.) и даже служили поводом для революционных преобразований в обществе [3].
Предлагаемый конспект лекций поможет студентам придти к четко- му и ясному выводу и пониманию того, что современные машины не все- гда есть продукт ума гениев, они являются инструментом, создаваемым инженерами и рабочими для качественного выполнения с необходимой производительностью тех или иных машинных технологий. Научиться создавать машины – цель и задача студента – будущего инженера- механика и машиностроителя.
12

1.2. Классификация машин
Создано огромное количество машин. Чтобы ориентироваться в этом множестве, применяют классификации. По виду преобразования машины делятся:
1) на энергетические, преобразуют энергию:
а) если механическую энергию преобразуют в любой другой вид, то это – генераторы;
б) если энергию какого-либо вида преобразуют в механическую, то это – двигатели.
2)технологические (рабочие) машины. Применяются на фабриках и заводах. Они изменяют материалы по форме и состоянию. Их примеры – станки, компрессоры, насосы и др.
3)транспортные машины. Они преобразуют материалы (и людей) по положению. Примеры: машины внутрицехового транспорта (кары), подъ- емные краны, манипуляторы, а также трамваи, автобусы и т.п.
4)кибернетические машины. Они собирают информацию, преобра- зуют и выдают ее потребителю.
К ним относятся: ЭВМ, машины для счета, бухгалтерского учета, ро- боты с сенсорными (т.е. техническими) органами чувств и интеллекта, ма- шины для выполнения функций тех или иных органов человека (протезы).
Машины, в которых все преобразования энергии, материалов и ин- формации выполняются без непосредственного участия человека, называ- ют машинами-автоматами.
1.3. Производительность технологических машин
Современные технологические машины (они главный предмет наше- го рассмотрения) производят конечный продукт (штуки, изделия и др.), характеризующийся завершенностью набора технологических операций (движений) по его изготовлению и повторяемостью набора для изготовле- ния каждого изделия. В этих условиях работу машин следует рассматри- вать как циклическую, а указанный набор технологических операций счи- тать технологическим циклом [4].
Обозначим Тц – время одного технологического цикла
(мин/изделие). Тогда производительность Пр выразится как частота повто- рений технологического цикла машины в единицу времени:
Пр = 1 изделий . Тц мин
13
Вводя понятие главного вала машины (реального либо воображаемо- го [5]) как тела, совершающего за время технологического цикла один пол- ный оборот, нетрудно придти к выводу, что частоту вращения этого вала nг.в. (мин−1) также можно выразить через время технологического цикла:
n |
= |
1 |
|
оборотов |
|
г.в. |
|
Тц |
|
мин |
|
|
|
|
|
||
и, следовательно, определять как: |
|
|
|
||
|
nг.в. =| Пр | . |
(1.1) |
|||
Часть машины, расположенную между главным валом и двигателем, будем называть приводом.
За время технологического цикла Тц обрабатывающий инструмент
машины, связанный с ее исполнительным органом, совершает рабочий и холостой ходы. Первый предназначен для преодоления технологических усилий, второй – для возвращения инструмента в исходное положение.
Обозначим t p.x. и tx.x. – |
время рабочего и холостого ходов инстру- |
|||||||||||||
мента. Тогда: |
|
|
|
|
Τц = tр.х. + tх.х. . |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
(1.2) |
||||
При проектировании машин стремятся так распределить время Тц , |
||||||||||||||
чтобы получить t |
р.х. |
> t |
х.х. |
. Разделим (1.2) на Т |
|
. Получим 1 = |
tр.х. |
+ |
t |
х.х. |
. |
|||
ц |
|
|
|
|||||||||||
|
|
|
|
|
|
|
Тц |
|
Тц |
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
Отношение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tр.х. |
= η |
|
|
|
|
|
(1.3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Тц |
|
|
|
|
|
|
|
|
называют коэффициентом производительности [4], который считают пока- зателем технического совершенства конструкций машин. Он показывает, какая часть времени технологического цикла является полезной, т.е. «про- изводительной». В силу сказанного, должно быть:
0,5 ≤ η ≤ 1,0 .
Когда машина имеет правый предел η , у нее tx.x. совмещено с t p.x. ,
и частота поступления продукта на обработку становится равной частоте его выпуска. Машина в этом случае становится «ротором». Роторные тех- нологии зародились во времена Великой Отечественной войны (линия по производству снарядов – академика Кошкина), ныне распространены в пищевой промышленности (линия разлива напитков в бутылки) и будут
14

служить основой машинных технологий, перспективных для XXI в. (вме- сте с лазерными, ядерными и другими технологиями (всего 10) [6].
Рассмотрим, какие параметры машинных технологий диктуют необ-
ходимость иметь ту или иную величину h . Известно, что скорость обра- ботки изделий определяется механическими свойствами материалов и ис- пользуемым инструментом. При удачном их сочетании обеспечивается не- обходимое качество. Технологическим параметром здесь может служить, и
часто действительно служит, средняя скорость обработки Vсрр.х. , т.е. сред-
няя скорость инструмента при совершении рабочих ходов. Зная рабочий ход Н исполнительного органа машины (соответствующий времени t p.x. )
можно получить:
tр.х. = H. . ,
Vсрр х
а, подставив это в формулу (1.3), получить[5]:
h = |
H |
× Пр. |
(1.4) |
V р.х. |
|||
|
ср |
|
|
Выражение (1.4) может служить для анализа используемых машин- ных технологий и для поиска резервов их улучшения.
В заключение отметим, что величину хода Н чаще всего выбирают исходя из размеров заготовки и технологических перебегов инструмента, а входной параметр для проектирования исполнительных механизмов ма- шин α р.х. получают, представив (1.3) как:
h = |
α р.х. |
, |
(1.5) |
o |
|||
360 |
|
|
|
откуда угол рабочего хода главного вала |
|
||
aр.х. = h ×360o . |
(1.6) |
||
15
2.СТРУКТУРА МАШИН
2.1.Машинный агрегат. Общее устройство
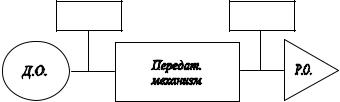
Современное развитое машинное устройство может включать как одну из ранее названных простых машин, так и их совокупность. В сложных ма- шинных агрегатах трудно выделить простые машины. Поэтому в таких агре- гатах выделяют следующие элементы главного привода (рис. 2.1):
1.Движущий орган (Д.О.) – твердое тело – источник механического движения
2.Рабочий орган (Р.О.) – твердое тело, несущее обрабатывающий инструмент, взаимодействующий с объектом обработки.
3.Передаточный механизм – совокупность подвижно связанных ме- жду собой твердых тел, предназначенных для преобразования движения двигателя в движение рабочего органа. Передаточный механизм – важ- нейший объект изучения в ТММ и М.
У. У. Т.У.
Передаточный
механизм
Рис. 2.1. Элементы структуры главного привода машин
Движение двигателя обычно простое – вращательное, как правило, равномерное либо поступательное. Рабочие органы совершают движение, которое определяется выполняемой машинной технологией. Например, в упаковочных автоматах это – сложное пространственное движение.
Передаточный механизм – совокупность связанных кинематически твердых тел (звеньев), предназначенная для преобразования имеющегося простого движения двигателя в требуемое движение рабочего органа. Пе- редаточный механизм может быть как простым, так и сложным. Простоты можно добиться знанием свойств механизмов, либо использованием при- ближенных законов движения рабочих органов. Чем грубее возможное приближение, тем передаточный механизм проще. Но и простой механизм может обеспечить большую точность за счет меньшего количества твер- дых тел (звеньев) и их подвижных соединений (кинематических пар), ко- торые снижают точность за счет реальной упругости звеньев и зазоров в
16
кинематических парах. В частных случаях, когда рабочий орган может со- вершать то же движение, что и двигатель (электрическое точило, вентиля- тор), передаточный механизм не нужен. В остальных случаях стремятся к упрощению передаточного механизма.
Машина имеет также устройство управления (У.У.) и может иметь транспортное (подающее) устройство (Т.У.).
2.2.Движущий и рабочий органы машин
Вкачестве движущего органа в машинах могут применяться различ- ные двигатели – электрические, тепловые, пневмо- и гидродвигатели и др.
Втехнологических машинах в качестве двигателя наиболее часто ис- пользуют короткозамкнутый асинхронный электродвигатель. Он простой, малогабаритный, имеет незначительную массу, но трудно регулируется.
Асинхронный электродвигатель включает короткозамкнутую обмот- ку (чаще роторную) в виде беличьего колеса и обычно статорную обмотку- индуктор, в котором трехфазный переменный электрический ток индуци- рует вращающееся магнитное поле.
При вращении поля индуктора в короткозамкнутом роторе наводятся вихревые токи, которые взаимодействуют с вращающимся полем индукто- ра, увлекая ротор. Ротор отстает от поля индуктора на величину скольже- ния, которая определяется нагрузкой.
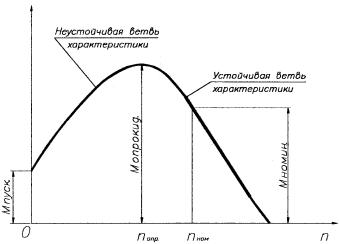
Механическая характеристика асинхронного короткозамкнутого электродвигателя (рис. 2.2) Μд = f (n) , (n – частота вращения вала, Μд –
движущий момент) имеет две ветви – устойчивую и неустойчивую.
Mд
nопр |
nном |
nc |
|
|
|
Рис. 2.2. Механические характеристики короткозамкнутого асинхронного электродвигателя
17

Устойчивая ветвь характеристики отличается тем, что при возраста- нии нагрузки на двигатель его обороты падают (до n опрокидывающего). Если момент на двигатель больше М опрокидывающего, осуществляется переход на неустойчивую ветвь характеристики и двигатель может остано- виться. Если его не выключить, то ротор, как неподвижный проводник во внешнем вращающемся магнитном поле индуктора, разогревается и может сгореть. При номинальных оборотах величина отставания ротора от поля статора определяется величиной скольжения:
S = nc − nном , nc
где nc – синхронная частота вращающегося ротора при отсутствии на-
грузки (частота вращения магнитного поля индуктора).
Посторонние силы могут разогнать двигатель до оборотов больших, чем синхронные, но при этом двигатель переходит в режим динамического торможения.
Синхронная частота асинхронного двигателя:
|
n = |
60 × f |
, |
|
|
||
|
c |
p |
|
|
|
||
где f – |
частота тока (промышленная f = 50 Гц), |
||
p – |
число пар полюсов обмотки индуктора (число секций). |
||
При р = 1, nc = 3000мин−1 . При этом двигатель наиболее простой и наименее массивный (1 обмотка). Частота вращения ротора при p > 1 – (максимально возможная):
nc = 1500мин−1 при p = 2 ,
nc = 1000мин−1 при p = 3 , nc = 750мин−1 при p = 4 .
По мере увеличения p масса двигателя увеличивается. Асинхронные электродвигатели подбирают по каталогам (Приложе-
ние 1), используя при этом среднецикловую мощность:
N= Αпс
цη × Τц
исинхронную частоту вращения nc , которая через параметры привода оп-
ределяет время технологического цикла.
Здесь Aηпс = Aдв – работа, которую должен совершать двигатель в цикле;
18
η – кпд передаточного механизма – находят приближенно при по-
мощи выражения:
η = η1 × η2 × η3 ,
где η1 ,η2 … – получаемые из технических справочников кпд простых
механизмов, последовательно образующих передаточный механизм. Работа полезных сил Aпс совершается полезными силами на рабочем
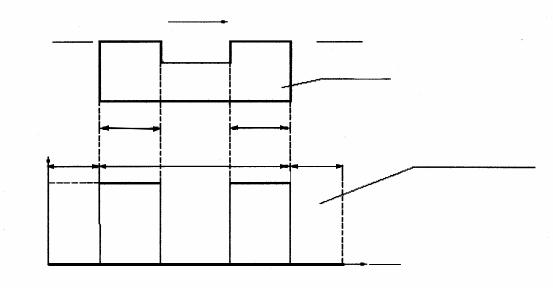
звене. Полезные силы определяются по теоретическим формулам, либо экспериментально в функции перемещения рабочего органа. Например, для поперечно-строгального станка диаграмма полезных нагрузок может быть установлена в зависимости от геометрии поверхности А – А обработ-
ки (lq , а, b) принятой величины перебегов резца |
fn и максимального тех- |
|||||
нологического усилия Fт (рис. 2.3). |
|
|
||||
|
|
|
|
vрезания |
|
|
|
А |
|
|
А (поверхность обработки) |
||
|
a) |
|
|
Эскиз обрабатываемой |
||
|
|
|
|
|
детали |
|
|
|
|
a |
b |
|
|
|
Fт |
|
ln |
lg |
ln |
|
|
Fт max |
График полезной нагрузки |
||||
1.0 |
|
|
|
|
||
б)
S H
1.0 H max
Рис. 2.3. К определению графика полезной нагрузки:
а) эскиз обрабатываемой детали; б) график полезной нагрузки
При этом работа полезных сил может быть вычислена исходя из гео- метрического смысла интеграла, как площади между кривой нагрузок и осью перемещений. На рис. 2.4:
Aпс = ∫ Fпс × dS = Fт (a + b) .
Конструкции рабочих органов изучают на выпускающих кафедрах по источникам, публикуемым для этих кафедр.
19
2.3. Передаточный механизм и его составляющие
Передаточный механизм служит для преобразования простого дви- жения двигателя в требуемое движение рабочих органов. Каждая машина имеет свой передаточный механизм. Все передаточные механизмы можно разбить на более простые механизмы. Имеется и обратная возможность, при которой передаточный механизм образуется из более простых меха- низмов и наследует основные свойства составляющих механизмов.
Механизмом называется совокупность кинематически связанных меж- ду собой твердых тел, предназначенных для преобразования движения одно- го или нескольких твердых тел в требуемое движение других твердых тел.
Согласно практической классификации [7], которая принята в техни- ческих справочниках, все простейшие механизмы можно разделить:
1)на рычажные;
2)зубчатые;
3)кулачковые;
4)механизмы прерывистого движения;
5)винтовые и червячные;
6)фрикционные передачи и вариаторы;
7)комбинированные механизмы.
Первые шесть механизмов – простейшие. Из них состоят более сложные – комбинированные механизмы.
Механизм, который выполняет в машине ту либо иную функцию, на- зывают функциональным.
20