

umk-teoriya-mehanizmov
.pdfдят векторы смещений Дпр I и Дпр II для закрепляемых на роторе масс
тпр1 и тпр2 .
Если вал имеет небольшую длину (диск), плечи hi – незначительны.
Тогда решают лишь первое уравнение, уравновешивая одним противове- сом главный вектор сил инерции. Главный момент этих сил приблизитель- но равен нулю из-за малости hi.
8.2.2. Уравновешивание механизмов
Механизмы – сложные механические системы, в которых звенья со- вершают все виды движения, а положение их центра масс непрерывно ме- няется. Рассмотрим шарнирный четырехзвенник (рис. 8.4). Известны:
lOA ,lAB ,lBC , lOC ,lOS1,lAS 2 ,lBS 3 , m1, m2 , m3.
Рис. 8.4. К определению положения центра масс шарнирного четырехзвенника
Для центра масс имеем:
|
|
∑mi |
× |
|
|
|
|
= |
ri |
(8.5) |
|||
rs |
||||||
∑mi |
||||||
|
|
|
||||
и можем этот центр определить геометрически, строя векторный много- угольник статических моментов масс звеньев (рис. 8.5).
m3 r3
rs ∑ mi
m2 r2
m1 r1
O
Рис. 8.5. К определению положения центра масс
121

При движении механизма изменяется обобщенная координата ϕ ,
центр масс S также перемещается и за цикл ϕ = 2π описывает замкнутую траекторию. Следовательно, центр масс S имеет как нормальную, так и касательную составляющие ускорения:
аs = asn + asτ .
Таким образом, появляется главный вектор сил инерции:
as × ∑mi = Фи .
В общем случае механизма силы инерции сводятся как к главному вектору, так и к главному моменту. Однако для плоских механизмов, как ранее указывалось, моментом сил инерции можно пренебречь. Необходи- мо уравновесить лишь главный вектор. Полное уравновешивание главного вектора называется статическим уравновешиванием механизма. Неполное уравновешивание называют частичным.
Существует множество методов статического уравновешивания ме- ханизмов.
По методу главных точек [3], каждый вектор в уравнении (8.6) рас- сматривают как сумму векторов, направленных по звеньям.
Рассмотрим шарнирный четырехзвенник. Имеем:
|
|
|
|
|
|
|
|
|
|
r1 |
= |
lOS |
; |
|
r2 |
|
= |
lOA |
+ |
lAS |
; |
|
r3 |
= |
lOA |
|
+ |
lAB |
+ |
lBS |
. |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|||||||||
Таким образом, уравнение (8.5) можно представить как: |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
= |
1 |
´ m1 |
|
|
+ m2 ( |
|
|
|
|
+ |
|
|
|
|
) + m3 |
( |
|
+ |
|
+ |
|
) . |
|||||||||||||||||||||||||||||
|
|
|
|
rs |
lOS |
lOA |
lAS |
|
lOA |
lAB |
lBS |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
∑mi |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
|
||||||||||||||||
Сгруппируем однонаправленные векторы. Получим: |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
1 |
|
|
|
( |
|
+ |
|
+ |
|
), |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rs |
|
h1 |
h2 |
h3 |
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑mi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
, |
|
|
– векторы главных точек (направлены как звенья). Их модули: |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
где |
h1 |
, |
h2 |
h3 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h1 |
= m1lOS |
|
|
+ lOA (m2 + m3 ) |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h2 |
= m2lAS |
+ m3lAB |
. |
|
|
|
|
|
|
|
(8.7) |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h3 |
= m3lBS |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
, |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
С помощью векторов |
h1 |
, |
h2 |
h3 |
|
задача определения положения центра |
||||||||||||||||||||||||||||||||||||||||||||||||||||
масс механизма упрощается, поскольку во всех положениях механизма модули этих векторов одинаковы, а направлены – по звеньям (рис. 8.6).
122

|
|
|
b |
|
|
h2 |
|||||
а |
· ∑m |
|
h3 |
||
rS |
|
S |
|||
|
|
i |
|
||
h1
О |
S*, с |
|
Рис. 8.6. Определение центра масс рычажного шестизвенника
Модули векторов hi составляются по определенному алгоритму. Они представляют собой сумму статических моментов двух масс относительно начала звена, которому вектор h параллелен: первая – собственная масса звена, приложенная в центре его масс, вторая – сумма масс последующих звеньев, приложенная в конце звена.
Пример: составить выражения модулей векторов h2 , h4 , h 5 для ме-
ханизма на рис. 8.7.
S2
|
|
|
|
|
|
|
|
h3′ |
|
|
|
S3 |
|
|
||
|
|
h |
|
|
|
|
S4 |
|||||||||
|
|
|
|
|
|
|
h4 |
|
||||||||
2 |
|
|
|
|
S'3 |
|
||||||||||
|
|
S1 |
|
|
|
|
|
|
|
|
|
|||||
|
|
h3 |
|
|
|
|
S5 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
h |
|
|||||||
h |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
5 |
S |
Е |
|||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
rS ∑mi
Рис. 8.7. Определение центра масс рычажного шестизвенника
Имеем, согласно алгоритму:
h2 = m2lAS 2 + lAB (m3 + m4 + m5 ) h4 = m4lДS 4 + lДЕm5
h5 = m5lES 5
Чтобы нейтрализовать главный вектор сил инерции, необходимо сде- лать центр масс S неподвижным. Для этого нужно, чтобы он оказался на не-
123
подвижном звене. При этом замкнутые контуры, образованные звеньями механизма и векторами главных точек, будут подобными. Условия подобия указанных контуров в шарнирном четырехзвеннике (рис. 8.6) имеют вид:
|
h1 |
= |
h2 |
= |
h3 |
. |
(8.8) |
|
|
|
|
||||
|
lOA lAB |
|
lBC |
|
|||
Условия (8.8) содержат два уравнения, в которых имеются массы |
|||||||
m1, m2 , m3 , длины звеньев lОВ,lAB , lBC и |
положения центров масс |
||||||
lOS1,lAS 2 ,lBS 3 . Если центр масс неподвижен, т.е. механизм статически урав-
новешен, уравнения (8.8) будут удовлетворяться. Если они не удовлетво- ряются, из них можно найти два неизвестных, при которых они будут удовлетворяться. При этом находят статические моменты новых масс двух
звеньев, ( m2l , |
m1 l |
, либо т3lBS ) и реализуют их за счет дополнитель- |
|
AS2 |
OS1 |
3 |
|
ных масс противовесов, закрепляемых на звеньях АВ, АО, либо ВС.
|
|
m = m + m |
|||
|
|
1 |
|
1 |
пр I |
|
|
m = m + m |
|||
|
|
2 |
|
2 |
пр II |
|
|
т* = т + т |
|||
|
|
3 |
|
3 |
прIII |
Закрепляют массы противовесов на звеньях так, чтобы получить рас- |
|||||
четные значения l |
, l |
, либо l |
BS* |
. Например, для звена АВ с расчетным |
|
OS* |
AS* |
|
|
|
|
1 |
2 |
|
3 |
|
|
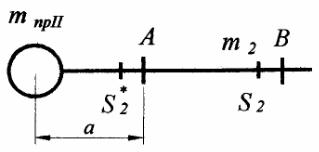
размером lAS2 :
Рис. 8.8. Распределение масс звена при известном положении их центра
Массу противовеса mпрII задают, m2 – прежняя масса звена, а S2 – прежнее положение центра масс.
Положение а противовеса находят из условия, что сумма статиче- ских моментов всех масс относительно их центра будет равна нулю. Для звена АВ величину lAS2 можно найти (рис. 8.8) как:
mпр II ×(а - lAS2 ) = m2 (lAS 2 + lAS2 ).
124

Схемы механизмов с полным статическим уравновешиванием масс могут иметь вид, показанный на рис. 8.9:
mпрII
mпрI |
mпрII |
mпрI |
|
Рис. 8.9. Варианты статически уравновешенного шарнирного четырехзвенника
Уравновешивание рассмотренным методом комбинированных меха- низмов превращается в громоздкую задачу, особенно, когда модули глав- ных точек hi являются переменными. Например, на рис. 8.10 модуль векто- ра h3 является переменной величиной. В этих случаях целесообразно рас- сматривать задачу в каждом их составляющих механизмов. В примере на рис. 8.10 целесообразно вначале с помощью противовеса mпр1 уравновесить звенья 1 и 2, затем звено 3 противовесом mпр3:
mпр1 × а = m1lOS1 + m2lОА; mпр3 ×b = lСS 3 × m3 .
После этого следует рассмотреть вопрос о полном, либо частичном уравновешивании присоединенного кривошипно-ползунного механизма СDE.
|
В |
|
|
А, S2 |
|
S1 |
S3 |
D |
О |
С |
E |
|
||
а |
|
|
|
b |
|
mпр1 |
|
mпр3 |
Рис. 8.10. Шестизвенник с полным статическим уравновешиванием ведущего кулисного механизма
125

Для уменьшения габаритов рычажные механизмы либо не уравно- вешивают и применяют в тихоходных ступенях машин, либо уравновеши- вают, но частично.
При подобии контура, составленного звеньями и векторами главных то- чек в кривошипно-ползунном механизме (рис. 8.11), центр масс S неподвиж- ным не будет, он будет перемещаться вдоль направляющей х-х. Это – частич- ное уравновешивание (нейтрализует силы инерции в направлении, перпенди- кулярном к направляющей х-х).
Рис. 8.11. Частично уравновешенный кривошипно-ползунный механизм
Полное уравновешивание здесь возможно лишь тогда, когда h1 и h2
равны нулю ( l |
и l |
AS* |
при этом будут отрицательными (8.6)). Для двух |
OS* |
|
|
|
1 |
|
2 |
|
противовесов получим два уравнения.
При частичном уравновешивании кривошипно-ползунного механиз- ма центр масс S перемещается вдоль направляющей x-x. При этом:
h1 |
= |
h2 |
. |
(8.9) |
|
|
|||
lOA |
|
lAB |
|
|
Уравнение (8.9) позволяет сконструировать механизм лишь с одним противовесом. Его можно закрепить на звене ОА, либо АВ.
8.2.3. Приемы взаимоуравновешивания механизмов машин
Путем оптимального конструирования можно уравновесить меха- низмы без применения противовесов, используя неуравновешенные силы инерции других механизмов.
Например, механизм, состоящий из блока одинаковых, неуравнове- шенных кривошипно-ползунных механизмов, будет статически уравнове-
шен (рис. 8.12).
Рис. 8.12. Статически уравновешенный механизм
126

Ту же задачу можно решить введением компенсаторов сил инерции: два одинаковых противовеса вращаются навстречу с одинаковой частотой. Силы инерции пересекаются и складываются для уравновешивания час- тично уравновешенного рычажного механизма (рис. 8.13).
Фu2
Ф0 = h sin(ω × t) Ф0 = h sin(ω × t)
Фu1 = Фu2
Рис. 8.13. Статическое уравновешивание компенсатором
Здесь остается момент сил инерции:
Ми = Фи × h = var ia (h = const, Фи = var ia ).
Он может нейтрализовать другой момент сил, либо сам быть нейтра- лизован «компенсатором» (рис. 8.14).
|
mпр |
= Фu × h |
Фu |
M u |
|
|
Фu = соnst, |
|
h = var ia
mпр Фu
Рис. 8.14. Компенсатор остаточных моментов сил инерции
127

8.3.Защита введением дополнительного колебательного контура
Вколебательную систему добавим дополнительный механический ко- лебательный контур, состоящий из массы m2 и упругого элемента в виде
пружины C2 (рис. 8.15). Получим систему с двумя степенями свободы. Обо-
значим y1 и y2 – перемещения масс m1 и m2 от положения их статического равновесия. Покажем, что в такой системе возможно движение при y1 = 0 .
y2
Положения статического
равновесия масс m1 и m2
1
y1
1
Рис. 8.15. Схема динамического виброгашения колебаний
Запишем дифференциальные уравнения движения масс m1 и m2:
m1ɺɺy1 = −C1 y1 + C2 ( y2 − y1 ) + F0 sin( pt);
(8.10)
m2 ɺɺy2 = −C2 ( y2 − y1 ).
Здесь С1y1 и С2 ( у2 − у1) – силы упругости в первой и второй пружинах.
Положив в (8.10) y1 = 0 , получим:
С2 y2 |
+ F0 sin pt = 0 |
|
(8.11) |
ɺɺ |
+ C2 y2 = 0. |
m2 y2 |
Из первого уравнения системы (8.11) находим:
y2 = − F0 sin pt, C2
что после двойного дифференцирования дает:
|
= p |
2 |
|
F |
|
ɺɺ |
|
0 |
sin pt. |
||
|
|
||||
y2 |
|
|
|||
|
|
|
C2 |
||
128

В результате подстановки во второе уравнение системы после со- кращений получаем:
p = |
C2 |
= p . |
|
||
|
m2 |
2 |
|
|
Т.е. если дополнительный колебательный контур будет иметь собст- венную частоту колебаний, равную частоте возмущающей силы, колеба- ния массы m2 будут отсутствовать.
Заметим, что неумеренное снижение массы m2 требует снижения и С2, а это ведет к возрастанию амплитуды F0  C2 колебаний массы m2. Ко-
C2 колебаний массы m2. Ко-
лебательный контур m2, С2, вводимый здесь дополнительно, называется динамическим виброгасителем.
129
9. МАНИПУЛЯТОРЫ И РОБОТЫ
Манипуляторы могут входить в состав машинного агрегата в качестве транспортирующего устройства (ТУ на рис. 2.1). Манипуляторы – это техни- ческие устройства для выполнения функций руки человека. Первые манипу- ляторы (антропоморфные) имели сходство с рукой человека (рис. 9.1).
9.1. Общее устройство. Три поколения роботов
Изначально манипуляторы создавались для работы в туднодоступ- ной среде, затем для выполнения монотонной работы [22].
Манипулятор, управляемый непосредственно от руки человека, на- зывается копирующим. Основной недостаток такого манипулятора – ограниченные силовые возможности, т.к. силы полностью передаются на руку человека. Дальнейшее развитие манипулятора привело к появлению сервоприводов, т.е. промежуточных механических приводов, которые позволяли мышечную силу человека многократно увеличивать. Недостаток: человек потерял представление о реально действующих силах. Выход был найден на путях автоматизации манипулятора, что привело к появлению роботов.
Робот – манипулятор, снабженный приводами и системой управле- ния. Первое поколение роботов выполняло движения по жесткой програм- ме, т.е. подобно станкам с ЧПУ. Программа изменения обобщенных коор- динат рассчитывалась по специальным формулам, вытекающим из суще- ства технологического процесса. Сервоприводы выполняли команды от системы управления. Появилась возможность перенастраивать робот.
Второе поколение – обучаемые роботы. Программа создается путем зашифрованной записи движений оператора.
Третье поколение – роботы с сенсорными (от лат. sensus – восприятие, чувство) органами. Они самообучаются в зависимости от обстоятельств. Пример – роботы, которые распознают и исполняют команды человека.
Степень подвижности робота является параметром, характеризующим его возможности выполнять механическую работу в тех или иных условиях.
Увеличение степени подвижности позволяет обеспечить выполне- ние работ в режиме, оптимальном по быстродействию, экономии энергии и т.п., но ведет к потере точности позиционирования.
Промышленные роботы выполняют ограниченные функции руки че- ловека, освобождающие человека от монотонного труда. Степень подвиж- ности таких роботов обычно не превышает трех.
130