

Глава 12
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Понятие о плоскопараллельном движении
Плоскопараллельным
движением
твердого тела называется такое
движение, при котором все точки тела
перемещаются в плоскостях, параллельных
какой-то одной плоскости, называемой
основной.

Примерами
плоскопараллельного движения могут
служить движение колеса на прямолинейном
участке пути, движение шатуна
кривошипно-ползунного механизма.
Из
определения плоскопараллельного
движения следует, что любая прямая АВ,
проведенная в теле перпендикулярно
основной плоскости, движется поступательно
(рис. 12.1). Для определения движения тела
на каждой прямой, перпендикулярной
основной плоскости, надо знать движение
только одной точки. Взяв эти точки в
одной плоскости Q,
параллельной основной, получим сечение
S,
движение которого определяет движение
тела. Но плоское движение сечения 5
вполне определяется движением двух
любых его точек Си
D
или отрезка CD.
Таким образом, вопрос
о плоскопараллельном движении тел
сводится к вопросу о движении отрезка
прямой в плоскости, параллельной
основной.
Плоскопараллельное
движение изучается двумя методами:
методом мгновенных центров скоростей
и методом разложения плоскопараллельного
движения на поступательное и вращательное.
Метод мгновенных центров скоростей
В основе этого метода лежит следующая теорема: всякое плоско- параллельное перемещение твердого тела может быть получено одним вращением около оси, перпендикулярной основной плоскости.
Пусть
отрезок, определяющий плоскопараллельно
движение тела, за конечный промежуток
времени переместился из положения АВ
в положение АХВ{
(рис. 12.2).
Соединим
точки А
и Ах,
В
и Вх
прямыми линиями и из середин полученных
отрезков (точек Mn
N)
восставим перпендикуляры до их взаимного
пересечения в точке О.
Эту точку соединим прямыми линиями с
концами отрезков АВ
и АХВХ
и получим два конгруэнтных (равных)
треугольника, имеющих общую вершину О:
ААОВ = ААхОВх.
Треугольник
АОВ
совмещается с треугольником АхОВх
путем поворота на угол ф вокруг точки
О, называемой центром
конечного поворота.
Точка
О есть
след оси конечного поворота,
перпендикулярной основной плоскости.
Таким образом, отрезок АВ,
определяющий плоскопараллельное
движение тела, перемещается в любое
новое положение путем одного вращения
вокруг оси конечного поворота. Рис.
12.2
Теорема
доказана.
Приведенное
доказательство будет справедливо и в
том случае, если перемещение тела
произойдет за бесконечно малый промежуток
времени At
В пределе при At,
стремящемся к нулю, вращение будет
происходить вокруг мгновенной
оси.
След мгновенной оси вращения на
плоскости фигуры называют мгновенным
центром скоростей.
Очевидно, что скорость точки, являющейся
в данный момент мгновенным центром
скоростей, равна нулю. Угловая скорость
со, с которой происходит мгновенное
вращение, называется мгновенной угловой
скоростью.
Точка
неподвижной плоскости, совпадающая в
данный момент времени с мгновенным
центром скоростей плоской фигуры,
называется мгновенным
центром вращения.
Если
прямая АВ
движется параллельно самой себе, то
можно полагать, что тело вращается
вокруг оси, удаленной в бесконечность,
иначе говоря, поступательное движение
можно рассматривать как вращательное
по кругу бесконечно большого радиуса.
Таким образом, плоскопараллельное движение тела может осуществляться путем последовательных мгновенных непрерывных поворотов вокруг мгновенных осей вращения.
Заметим,
что методом мгновенных центров скоростей
можно пользоваться только
при определении скоростей
точек плоской фигуры, но не при определении
траекторий и ускорений этих точек.
Свойства мгновенного центра скоростей
Рассматривая
в каждый момент времени сложное
плоскопараллельное движение как
простейшее — вращательное, можно для
вычисления скоростей точек твердого
тела применять все выведенные ранее
формулы вращательного движения.
Установим
следующие три свойства мгновенного
центра скоростей, вытекающие из
закона распределения скоростей точек
твердого тела, вращающегося вокруг
неподвижной оси: 1)
скорость
мгновенного
центра равна нулю; 2)
мгновенный центр лежит на перпендикуляре,
восставленном из точки к направлению
ее скорости; 3) скорость точки равна
произведению мгновенной угловой
скорости на расстояние точки от
мгновенного центра скоростей (рис.
12.3):
vA
~
со О А
На
основании перечисленных выше свойств
можно установить следующие пять
способов
определения положения мгновенного
центра скоростей плоской фигуры,
определяющей плоскопараллельное
движение тела.
Известны мгновенная угловая скорость ф и скоростьvAка- кой-то точки Л плоской фигуры (см. рис. 12.3).
В
этом случае мгновенный центр скоростей
О
находится на перпендикуляре,
восставленном из точки А
к вектору скорости vA
на расстоянии О
А
= vA
/ со.
Известны направления скоростей двух точекА и Вплоской фигуры (рис. 12.4).
В
этом случае мгновенный центр О
лежит на пересечении перпендикуляров,
восставленных из точек А
и В
к направлениям их скоростей, причем
vA
_ со ОА
_ ОА
vB
со OB
OB
’
т.е.
скорости точек плоской фигуры прямо
пропорциональны их расстояниям от
мгновенного центра скоростей.
Известно, что скорости двух точекАиВплоской фигуры параллельны друг другу, направлены в одну сторону, перпендикулярны отрезкуАВи по модулю не равны (рис. 12.5).
В
этом случае мгновенный центр скоростей
О находится в точке пересечения прямой,
соединяющей начала векторов vA
и vB
с прямой, соединяющей концы этих
векторов.
Если
векторы скоростей точек А
и В
равны между собой, то мгновенный центр
скоростей в данный момент находится
в бесконечности, мгновенная угловая
скорость равна нулю, скорости всех точек
плоской фигуры будут одинаковы и
движение будет мгновенно поступательным.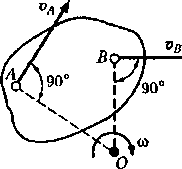
Известно, что скорости двух точекАиВплоской фигуры параллельны друг другу, направлены в противоположные стороны и перпендикулярны отрезкуАВ(рис. 12.6).
Рис. 12.5
Рис.
12.6В
этом случае мгновенный центр скоростей
О
находится в точке пересечения отрезка
АВ
с прямой, соединяющей концы векторов
vA
wvB.
5.
Известно, что плоская фигура катится
без скольжения по неподвижной кривой.
В
этом случае мгновенный центр скоростей
О находится в точке соприкосновения
фигуры с кривой, так как скорость этой
точки фигуры в данный момент равна нулю.
В
заключение рассмотрим качение колеса
по прямолинейному рельсу в различных
условиях трения.
На
рис. 12.7 показаны положения мгновенного
центра скоростей (МЦС) и графики
скоростей точек вертикального диаметра
в случаях трения скольжения, трения
качения, трения качения с проскальзыванием,
частичного и полного буксования колеса.
Качение
Скольжение Качение с проскальзыванием
Частичное
буксование Полное буксование Рис.
12.7
Решение.
По условию колесо катится без
скольжения, поэтому скорость точки D
касания колеса с рельсом равна нулю,
следовательно, точка D
—
мгновенный центр скоростей колеса.
Зная скорость точки О, находим угловую скорость со колеса:
w — i'q / 0D — Vq / R.
На основании свойств мгновенного центра скоростей определим модули скоростей точек А, В и С колеса:
vA=co-AD = 2 = 2>/2 = 2,83 м/с;
Д
vB = со - BD = —2 Л = 2-2 = 4 м/с;
R
vc = о ■ CD = ^ Ryf2 = 2л/2 = 2,83 м/с.
R
Направления векторов скоростей точек А, В и С перпендикулярны прямым, соединяющим эти точки с мгновенным центром скоростей.
Разложение плоскопараллельного движения на поступательное и вращательное
В основе этого метода лежит следующая теорема: всякое плоскопа- раллелъное перемещение твердого тела может быть получено с помощью одного поступательного и одного вращательного движения.
Пусть
за время At
отрезок АВ,
определяющий плоскопараллельное
движение тела, переместился в положение
А^ВХ
(рис. 12.9).
Предположим,
что отрезок АВ
вначале перемещался только
поступательно, причем все его точки
двигались одинаково, как точка А.
Таким образом, отрезок перешел в
положение АХВ2,
после чего его можно переместить в
положение АХВХ
посредством только вращательного
движения во-
круг
точки j4j.
Отсюда видно, что сложное плоскопараллельное
движение состоит из двух
простейших движений: поступательного
и вращательного, причем можно считать,
что эти движения происходят
одновременно.
Установим
зависимость между векторами скоростей
точек А
и В.
Для этого соединим прямыми точки A,
At
и В,
Bv
В2>
в результате чего получим следующую
зависимость между векторами перемещений
точки В:
ВВХ= ВВ2 + в2вх.
Так
какBB2
— AAV
то можно записать, что ВВ^
= АА^
+ -^2-^1-
Разделим
все члены равенства на At
и перейдем к пределу при At,
стремящемся к нулю:
• ВВ\ 1. АА^ .
hm
—-
-
hm L
+
hm
■ ■ ,
дг->0
At
Af->0
At
Дг->0
At
получим
VB =
где
vB
— вектор абсолютной скорости точки В;
vA
— вектор абсолютной скорости точки
A;
vBA
— вектор скорости точки В
в относительном вращательном движении
отрезка АВ
вокруг точки А,
направленный перпендикулярно отрезку
АВ.
Таким образом, плоскопараллельное движение тела может осуществляться путем одновременно происходящих вращательного и поступательного движений; поступательное движение можно считать переносным, а вращательное — относительным. Вектор абсолютной скорости какой-то точки В равен вектору абсолютной скорости любой другой точки А плюс вектор скорости точки В в относительном вращательном движении отрезка АВ вокруг точки А.
Точку,
вокруг которой происходит относительное
вращательное движение, будем называть
полюсом.
Если
за полюс вместо точки А
принять точку В,
то, рассуждая аналогично, получим
VA=28+VAB'
Сравнивая
это векторное равенство с предыдущим,
видим, что векторы относительных
скоростей vBA
и vAB
по модулю равны между собой, т.е.
Из
рис. 12.9 видно, что направление
относительного вращения и угол поворота
отрезка АВ
за какой-то промежуток времени не
зависят от выбора полюса, т.е.
ФВЛ
“ ФАВ'
Продифференцировав
это равенство по времени, получим
d<?BA
или
со ВА
= ю
Следовательно,
относительная угловая скорость от
выбора полюса не зависит. Аналогично,
d($BA
dt
dt
или
авл
~алв-
Следовательно,
и относительное угловое ускорение от
выбора полюса не зависит.
Из
рассмотренного следует, что при
разложении плоскопараллельного
движения на поступательное и вращательное
поступательная
часть движения в общем случае зависит
от выбора полюса, а вращательная часть
движения от выбора полюса не зависит.
Так
как за полюс может быть выбрана любая
точка плоскости, в том числе и мгновенный
центр скоростей, то при разложении
плоскопараллельного движения на
поступательное и вращательное угловая
скорость относительного вращательного
движения всегда равна абсолютной
угловой скорости.
Если
векторное равенство vA
— vB
спроецировать на направление прямой
АВ,
то получим, что проекция vA
равна проекции vB,так
как проекция vAB
равна 0.
Следовательно,
при плоскопараллельном движении
проекции
скоростей двух точек плоской фигуры
на направление прямой, соединяющей
эти точки, равны между собой.
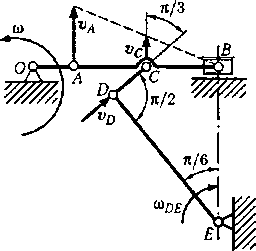
Пример
12.2. Кривошипный механизм связан шарнирно
в середине С
шатуна
со стержнем CD,
а последний со стержнем DE,
который может вращаться вокруг точки
Е.
Определить угловую скорость стержня
DE
в указанном на рис. 12.10
положении кривошипного механизма,
если точки В
и Е
расположены на одной вертикали; угловая
скорость со кривошипа О
А
равна 8
рад/с, О
А
= 25 см, DE=
= 100 см, ZCDE=п/2
рад и ZBED
= л/6
рад.
Решение.
Прежде всего определим скорость точки
А
кривошипа ОА\
•АВ-
df
dt
В
заданном положении механизма ползун В
занимает крайнее правое положение и
его скорость в этот момент равна нулю.
Следовательно, точка В
в данный момент — мгновенный центр
скоростей шатуна А
В.
Так как скорости точек шатуна прямо
пропорциональны их расстояниям от
мгновенного центра скоростей, то
запишем пропорцию
vc/vA =СВ/АВ,
из
которой определим модуль скорости точки
С:
vc~va‘
СВ
/ АВ
- 2 ■ 0,5 = 1 м/с.
Вектор
скорости vc
перпендикулярен шатуну АВ.
Вектор скорости точки D
перпендикулярен стержню DE,
т.е. направлен вдоль стержня DC.
Скорость
точки D
определим, разложив сложное
плоскопараллельное движение звена DC
на поступательное и вращательное по
формуле
vD = vc + vDC>
где
вектор относительной скорости vDC
перпендикулярен звену DC.
Спроецировав
это векторное равенство на направление
прямой DC,
получим
vD
— vc
cos
тс /3 = 1-0,5 = 0,5 м/с.
Выразив
скорость точки D
через угловую скорость стержня DE,
получим
VD — ®DE ' DE,
откуда,
подставив числовые значения, найдем
u>de
=
vd
/ DE
= 0,5 /1 = 0,5 рад/с.
Раздел третий ДИНАМИКА