

Лекции ГИС1
.pdfРисунок . Простое и функциональное расстояния, а) Отсчет простого расстояния от центральной точки создает изотропную поверхность. b) Изменение изотропной поверхности из-за сопротивления при передвижении.
Указанное ограничение также относится и к созданию изотропных поверхностей. Для выполнения таких расчетов требуется другая структура векторных данных, специально созданная для моделирования поверхностей. Наиболее распространенной такой структурой является нерегулярная триангуляционная сеть (TIN. В этой модели могут определяться расстояния, но со значительными вычислительными затратами. Пользователи ГИС, работающие с моделями поверхностей, чаще всего полагаются на растровые системы, особенно тогда, когда требуется измерять расстояния на поверхностях.
Функциональное расстояние
Хотя евклидово расстояние полезно, нашу способность двигаться по прямой часто ограничивают препятствия или сложная местность. Например, мы можем быть ограничены либо использованием сетей, таких как авто- и железные дороги, либо потому, что местность слишком пересеченная, образуя фрикционную поверхность (friction surface), либо из-за ограждений, окружающих промежуточное пространство, которые действуют как барьеры (barriers) на нашем пути. Фрикционные поверхности это области, которые замедляют наше продвижение, увеличивая время достижения заданной точки по сравнению с поверхностью без сопротивления. Барьеры бывают двух типов: абсолютные (absolute), движение через которые невозможно (скалы, огражденная территория, озеро и т.д.), и условные (relative), которые идентичны фрикционным поверхностям, но занимают лишь небольшие участки покрытия. Примерами условных барьеров могут быть холмистая местность, мелкие реки, преодолимые вездеходами, или участки леса, которые тормозят, но не останавливают полностью движение стада животных.
Абсолютные барьеры останавливают или отклоняют движение, в то время как относительные барьеры и фрикционные поверхности налагают некоторую стоимость на передвижение, замедляя его или требуя большего расхода энергии.
При движении по изотропной поверхности без барьеров, ГИС просто добавляет одну ячейку растра на единицу пути, и результирующая поверхность функциональных расстояний будет подобна (с разницей лишь в абсолютных значениях) поверхности простых геометрических расстояний. При этом не важно, насколько большое или малое значение импеданса (impedance), или сопротивления, приходится на единицу пути.
Поверхность может быть изотропной, т.е. с одинаковыми свойствами независимо от направления движения по ней, и анизотропной (при этом на ней не обязательно должны быть барьеры). Фрикционнаяповерхностьсоздаетсопротивление, приэтомонаможетбытьиизотропной.
101
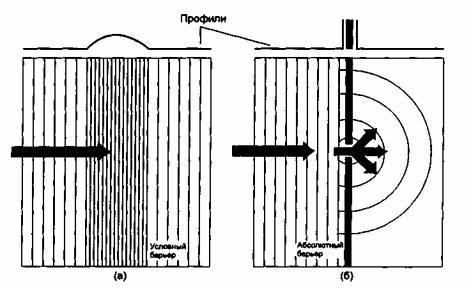
Представьте себе движение по растру слева направо вдоль строки пикселов. Допустим также, что мы хотим разместить условный барьер от верха до низа карты перпендикулярно этому направлению движения. Мы можем сделать это, приписав пикселам, выстроенным в вертикальную линию, значение импеданса, равное не единице, а, скажем, пяти. Тогда, двигаясь слева направо, до барьера мы испытываем сопротивление в одну единицу на каждую проходимую ячейку растра. Подойдя же к барьеру, мы должны приложить в пять раз больше усилий (выражаемых количеством бензина, времени, или потерей скорости движения) на преодоление только одной ячейки, принадлежащей барьеру, чтобы попасть за него. То есть, если до барьера график затрат выглядел бы как наклонная прямая линия, то в месте барьера на этом графике появится вертикальный скачок. Такой барьер называется относительным (или условным), так как он может быть преодолен при приложении дополнительных усилий.
Рисунок . Условные и абсолютные барьеры. Условные барьеры (а) имеют определенную стоимость их преодоления. Абсолютные барьеры (b) либо полностью останавливают движение, либо отклоняют его к какой-нибудь доступной проходимой точке.
Условный барьер может быть не только тонкой линией, но и площадным объектом. Конкретное значение импеданса может быть связано как с фактом полного прохождения такой области, так и с фактом проникновения внутрь нее на единичное расстояние. В первом случае обычно говорят о барьере, а во втором о распределенном импедансе, о районировании территории по величине затрат на передвижение, о поверхности, представляющей функцию затрат. Возможен также предельный случай, когда значение импеданса будет разным в каждой ячейке растра. И даже более того значение импеданса даже в одной ячейке может быть различным при передвижении через нее по разным направлениям. Например, оно может зависеть от направления ветра или от ориентации снежных застругов в тундре.
Абсолютный барьер можно представить себе как некоторое продолжение идеи условного барьера. Для линейного объекта мы просто присвоить ему значение импеданса, непреодолимое в рамках решаемой задачи.
Хотя сама идея присвоения значений импеданса — проста, использование ее часто вызывает трудности. Каково сопротивление леса для стада оленей, движущегося через него? Насколько больше бензина тратит автомобиль на подъеме в 15% по сравнению с горизонтальным движением? Насколько дольше крупное млекопитающее переплывает реку шириной 100 метров по сравнению с переходом по мосту такой же длины? Это вполне реальные вопросы, которые должны получать ответы перед тем, как мы создадим наши
102
барьеры и фрикционные поверхности. Чаще всего конкретного ответа не просто нет, а он еще и зависит от таких трудноопределимых параметров, как подвижность оленей, КПД автомобиля или плавательных способностей зебр. Другими словами, чаще всего у нас нет точных значений сопротивления. Обычно мы прибегаем к употреблению порядковой ранжирующей системы для присваивания величин импеданса, основываясь на сравнении относительной трудности движения по каждой встречающейся фрикционной поверхности или через барьеры. Это не всегда легко, а результаты не так точны, как нам хотелось бы. В установке этих величин рекомендуется действовать с осторожностью, убедившись, что использованная система достаточно обоснована, и что сравнения допустимы. Прежде всего, результаты анализа расстояний с использованием барьеров и фрикционных поверхностей должны рассматриваться с определенной критичностью, особенно если эти результаты используются для принятия каких-либо решений.
Перед тем, как приступить к растровым подходам для неэвклидовых и функциональных расстояний, мы должны рассмотреть две дополнительные характеристики расстояний. Расстояние может рассматриваться не только как евклидово или неевклидово, изотропное или функциональное, но также и как инкрементное, или нарастающее расстояние (incremental or cumulative distance). Инкрементное расстояние складывается из длин этапов пройденного пути. Каждый последующий этап добавляется просто как мера длины, наподобие того, как это делалось с изотропной поверхностью. Другими словами, инкрементное расстояние - это кратчайший путь между двумя точками без учета сопротивления в пути. Если инкрементное расстояние измеряется по всей поверхности, то в результате мы получаем поверхность кратчайших расстояний (shortest path surface), если же этот метод ограничивается линиями или дугами (или линейными группами ячеек растра), то мы имеем дело с линиями кратчайших расстояний, а не с поверхностью.
Целью определения функционального расстояния на поверхности с сопротивлением (например, топографической) является поиск маршрута наименьшей стоимости (least-cost distance), или кратчайшего расстояния между двумя точками покрытия. В реальных задачах обычно учитываются стоимостные показатели нескольких покрытий, которые с помощью весовой функции сводятся к некоторому общему стоимостному покрытию.. Аналогично мы можем построить и поверхность наименьшей стоимости для перемещения из одной точки во все другие точки покрытия. Рассмотрим два этих случая по отдельности.
Допустим, что мы имеем дело с реальной топографической поверхностью, и стоимость связана с изменением значения высоты от ячейки к ячейке. Мы могли бы поместить каплю воды на вершину нашей поверхности и проследить ее движение, которое будет путем наименьшего сопротивления. Между прочим, многие программы используют в качестве команд такие слова как "drain" (сток) или "stream" (поток, река). Для создания маршрута наименьшей стоимости (в противоположность кратчайшему маршруту) на растре размером 5x5 мы начинаем с верхней ячейки и ищем среди восьми соседей ячейку с наименьшим значением импеданса (в данном случае с наименьшим значением высоты). Эта ячейка помечается флажком и становится начальной точкой для следующей итерации. Процесс продолжается, пока не будет достигнута наименьшая высота покрытия. Таким образом, из отмеченных ячеек мы получаем маршрут от вершины холма к подножию, который требует наименьшее количество усилий (Рисунок а и b).
Хотя одного маршрута наименьшей стоимости часто достаточно, может оказаться полезным просмотреть все возможные маршруты из определенного места с учетом стоимости передвижения по фрикционной поверхности. (Рисунок ).
103
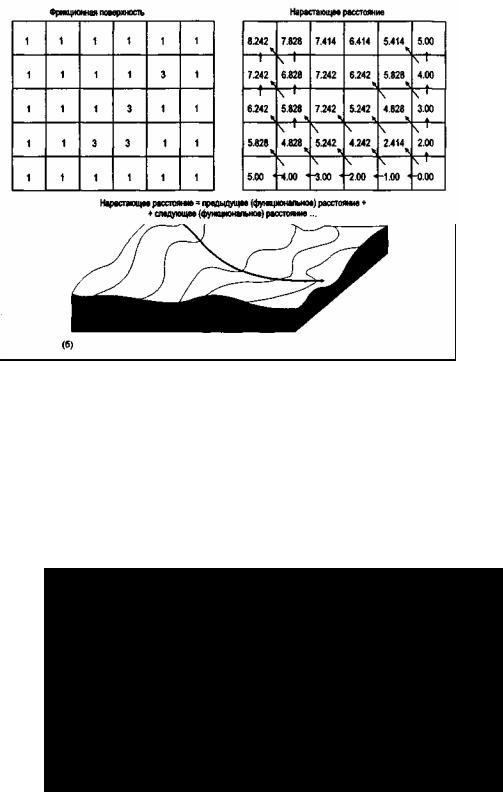
Рисунок 8.7. Маршрут наименьшей стоимости. Определение маршрута наименьшей стоимости требует сравнения начальной ячейки с ее непосредственными соседями: а) пример с футбольным мячом; b) то же в случае реки, текущей по склону холма.
Здесь мы имеем две сетки растра: первая — это массив значений импеданса, вторая — вычисленные значения нарастающего расстояния с учетом импеданса. Процесс вычисления немного сложнее, чем только что рассмотренный поиск кратчайшего маршрута. Здесь программа не просто ищет наименьшее значение, но вычисляет значение для каждой смежной ячейки с учетом как эвклидова расстояния, так и значения импеданса. При необходимости могут вычисляться и диагональные расстояния между ячейками.
Рисунок . Нарастающее расстояние. Поверхность нарастающей стоимости: а) фрикционное покрытие, b) вычисленные значения. Отметьте, что диагональные ячейки используют значение 1.414 в качестве расстояния вместо 1 для горизонтальных и вертикальных. Выделены ячейки со значением импеданса 3. Для накопления расстояния предыдущее значение складывается с вычисленным.
Процесс начинается в ячейке (0,0). Для каждой соседней ячейки расстояние считается инкрементами по полшага умножением каждой занятой ячейки растра (включая начальную)
104
на ее значение сопротивления и на значение ее ширины (1 для горизонтальных и вертикальных ячеек и 1.414—для диагональных). Поскольку мы движемся из середины начальной ячейки к середине следующей, мы умножаем каждую на 0.5, чтобы показать инкремент в полшага. Таким образом, формула для каждого шага на половину ячейки растра такова:
0.5 (расстояние по сетке х коэффициент трения).
Затем мы должны прибавить это к накопленной величине сопротивления. Так, для движения из ячейки (6,6) к ячейкам (5,5), (4,4) и (5,6) вычисления таковы:
5,5 |
0.5(1.414×1.00) |
= |
0.707 |
|
0.5(1.414×1.00) |
= |
0.707 |
|
Вместе |
= |
1.414 |
|
+ Предыдущее |
= |
0 |
|
значение |
|
|
|
Итого |
= |
1.414 |
4,4 |
0.5(1.414×1.00) |
= |
0.707 |
|
0.5(1.414×3.00) |
= |
2.121 |
|
Вместе |
= |
2.828 |
|
+Предыдущее |
= |
1.414 |
|
значение |
|
|
|
Итого |
= |
4.242 |
5,6 |
0.5(1.000×1.00) |
= |
0.500 |
|
0.5(1.000×1.00) |
= |
0.500 |
|
Вместе |
= |
1.000 |
|
+ Предыдущее |
= |
0 |
|
значение |
|
|
|
Итого |
= |
1.000 |
Следующий шаг выбор наименьшего накопленного расстояния для каждой прилежащей ячейки. Затем процесс повторяется. Расстояния с сопротивлением на всех шагах складываются вместе для получения нарастающего итога. Как видите, процесс довольно утомителен, вот почему мы используем компьютеры. В результате мы получаем поверхность наименьшей стоимости, а не один маршрут, и мы можем выбрать маршрут наименьшей стоимости из любой и в любую точку покрытия. Это делается просто выбором смежных ячеек с наименьшими значениями стоимости.
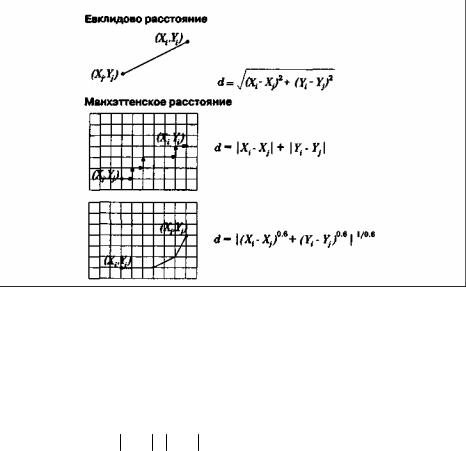
В случае векторных координат, описывающих точечные, линейные и площадные объекты, для определения расстояний может использоваться серия модификаций стандартной теоремы Пифагора. Вначале вспомним исходную формулу для евклидова или прямолинейного расстояния между двумя точками.
dij =  (Xi −Xj )2 +(Yi−Yj )2
(Xi −Xj )2 +(Yi−Yj )2
Однако, если мы не можем двигаться по прямой, т.е. имеется некоторое препятствие, вынуждающее нас отклоняться от прямой, то мы можем обобщить эту формулу в неэвклидову форму:
dij =[(Xi −X j )k +(Yi −Y j )k ]1k
105
где степень 2 заменяется на k (соответственно корень будет не второй, а k-й степени),
— некоторое из диапазона возможных значений.
Нетрудно заметить, что подстановка k = 2 превращает эту формулу в предшествующую формулу для расстояния по прямой.
Рисунок . Измерение расстояния в векторной модели данных. Два способа определения неэвклидова расстояния, каждый является модификацией формулы теоремы Пифагора, причем в формуле меняется только параметр k.
Допустим, например, что мы ищем расстояние между двумя точками в Манхэттене, где десятки высоких зданий и кварталы ограничивают наше движение отрезками под прямым углом друг к другу. В этом случае мы имеем значительные ограничения движения, и переменная k принимает значение 1, а формула расстояния принимает вид:
dij = Xi −Xj + Yi−Yj
Как видите, любое расстояние в векторной БД может быть определено простым изменением параметра k в соответствии с имеющимися условиями (Рисунок 8.9). Значение k = 1.5 соответствует случаю где-то между манхэттенским и евклидовым расстоянием. Даже фрикционные поверхности могут оцениваться с помощью этой формулы. Например, k = 0.6 позволяет нам найти кратчайшее расстояние вокруг некоторого барьера, такого как озеро.
Мы можем определять кратчайшие маршруты и маршруты наименьшей стоимости с учетом импеданса и барьеров также и в случае движения по сетям. Однако, этот вопрос относится скорее к связности, чем к измерению расстояний
106
Лекция № 15 Классификация
Классификация наземных объектов старая проблема. Она привлекала умы ученых разных направлений, каждый из которых смотрел на Землю своими глазами, используя свой лексикон и свой интеллектуальный фильтр. Хотя идея классификации разбросанных по поверхности Земли объектов кажется довольно простой, практические аспекты этой задачи далеки от полной очевидности. То, как мы классифицируем то, что видим, получит отображение в том, как мы анализируем данные, и что означают наши выводы. На самом деле, то, как мы классифицируем данные, может даже предопределять, какие выводы мы получим. К этому процессу нельзя относиться беспечно, так как плохая классификация может сбить нас с пути.
Неправильная классификация может сбить с толку тех, кто принимает решения.
То, как мы классифицируем вещи, имеет много общего с тем, как мы на них смотрим, при каком разрешении или масштабе, и как мы используем данные впоследствии. Способ классификации влияет и на выбор средств наблюдения наземных, воздушных, космических. Классификации могут быть простыми, на основе одного критерия, такого как тип ландшафта, или сложными, на основе многих критериев (высота, количество осадков, экологическое функционирование и т.д.). Некоторые классификации могут создаваться комбинированием многих параметров разных покрытий. Способы классификации одного набора покрытий могут полностью меняться в зависимости от тех вопросов, которые мы хотим выяснить.
Классификации могут быть разложены на составные части или объединены с данными других покрытий для переклассификации того, что мы имели вначале. Число возможных методов классификации и переклассификации бесконечно. Все они сильно зависят от потребностей пользователя.
ПРИНЦИПЫ КЛАССИФИКАЦИИ
Классификация одна из самых естественных вещей, которые делают люди. Даже самые заурядные вещи подвергаются классификации. Мы носим одежду различных типов, водим машины разных марок, имеем различные категории занятости. Мы мужчины или женщины, члены той или другой политической партии или независимые, взрослые, подростки или дети, и т.д. Используемые нами классификации приводят людей, места и вещи в некоторую систему, которая дает нам понимание того, как они функционируют: подобно другим членам своих групп и отлично от членов других групп или классификаций. В этом суть классификации.
Свойство людей создавать классификации давно распространяется на анализ природных образований на земной поверхности. Многовековая история картографии показывает, как люди группировали природные образования по физическому типу (суша и воды), политическим подразделениям (государства), присутствию людей (обитаемые и необитаемые). Веками эти классификации помещались на карты без теоретического обоснования того, как они должны организовываться, и учета влияния, которое они могут иметь на принимаемые решения. Проблемы классификации были подробно исследованы лишь тогда, когда была признана важность классификации содержимого карт как средства принятия решений и научного инструмента [Sauer, 1921]. Хотя интерес к влиянию классификации территорий начал распространяться в начале 1900-х годов среди организаций, управляющих природными ресурсами и землеустройством, потребность в них возрастала параллельно с развитием других технологий - спутникового ДЗ, компьютерной картографии, ГИС. Благодаря способности этих систем поддерживать и обрабатывать
107
большие объемы пространственной информации, пришло время созревания интереса к лучшему классифицированию участков земной поверхности. Сейчас, как и тогда, важно, чтобы, иногда банальная, задача классификации не принималась на веру, а рассматривалась в меру скептически из-за потенциальных ограничений, которые накладываются классифицирующими фильтрами на наши интерпретации и решения.
Классификация зависит от типов объектов, которые мы собираемся группировать. Существуют раздельные классификации для растительности, почв, геологических формаций и гидрографии, сельского хозяйства, землепользования и типов ландшафта. Эти классификации могут быть простыми, как классификация растительности на основе только видов растений, или они могут быть более функциональными, как картографирование экосистем, а не одной только растительности. Варианты классификации диктуются масштабом, когда, например, растительность отображается не для малых регионов, а для целой Земли [UNESCO, 1973]. Или система может быть целиком ориентирована на полномочия определенной организации. Другие случаи классификации определяются больше техникой, используемой для получения исходных данных, такой как спутниковое ДЗ. Бывают и такие, которые адресованы известным или предполагаемым взаимодействиям факторов, как показывает пример карт физико-биологических комплексов, анализа потенциала земли или ее пригодности для конкретных целей; эти классификации довольно похожи, но отражают тонкие различия в том, как классификация должна применяться. Физико-биологические комплексы используют комбинацию пространственно упорядоченных проявлений биологических и физико-географических феноменов, связанных, например, с почвами или топографией, для оценки жизнестойкости природных систем. Анализ потенциала территории чаще всего относится к ее способности поддерживать жилищное строительство, сельскохозяйственную деятельность, дикую природу и другие важные категории. Карты пригодности отражают области, классифицированные не только по типам почв, но и по другим биологическим и физическим характеристикам, они используются для оценки пригодности соответствующих регионов для разнообразной человеческой деятельности.
Все вместе, эти классификации и тысячи других, которые созданы и которые создаются, имеют одну общую черту: все они учитывают целевую аудиторию, или конечных пользователей. Пользователи одних классифицированных наборов данных, таких как классификации пригодности земли для одного типа землепользования, очень конкретны. В других случаях карта будет использоваться гораздо более широкой аудиторией. Система классификации растительности ЮНЕСКО [UNESCO, 1973], созданная до нашествия спутниковых техники, была разработана для унификации классификаций растительности по всему миру, чтобы любой человек на Земле, интересующийся растительностью, мог говорить о растениях, используя единую базовую систему. Хотя этот широкий подход к классификации может быть полезен как общий стандарт, его ценность как средства для принятия решений в конкретных ситуациях ограничена. Благодаря сегодняшним ГИС мы можем хранить исходные данные, не подвергнутые классификации, и обрабатывать их в соответствии с нашими потребностями. Это наиболее ценная сторона классификации средствами ГИС: чем более точно ваша классификация настраивается на нужды пользователей, тем более полезной она становится. ГИС обеспечивают широкие возможности классификации и переклассификации атрибутивных данных для достижения этого результата: На самом деле, их работу можно отнести прежде всего к переклассификации, так как данные, вводимые в ГИС, часто уже классифицированы. Оператор ГИС либо использует существующую классификацию, либо перерабатывает имеющиеся атрибуты для создания классификации, лучше соответствующей поставленным вопросам или принимаемым решениям. Поэтому в остальной части главы мы будем обозначать эту функцию как "переклассификация".
108
ПРОСТЕЙШАЯ ПЕРЕКЛАССИФИКАЦИЯ
Точки и линии могут переклассифицироваться простым перекодированием атрибутов в их таблицах или перекодированием значений ячеек растра для создания новых точечных или линейных покрытий. В этом простом процессе пользователь меняет сами атрибуты и не более того. Процесс практически такой же при работе с площадными объектами в растровых системах. Выбрав атрибуты нужных областей, вы просто изменяете числа кодов или имена атрибутов для этих ячеек растра. В простых растровых системах, где нет привязанных к растру таблиц атрибутов, вы должны также изменить и легенду нового покрытия для отражения изменившейся ситуации.
Хотя многие более совершенные растровые ГИС, отслеживая атрибуты, помогут вам избежать проблем, подобных упомянутой, в простых системах нужно проявлять осмотрительность при выполнении переклассификации. Здесь можно предпринять две вещи. Первое, вы можете выбрать новые коды атрибутов, не совпадающие с уже имеющимися в покрытии. Этот прием полезен и в устранении путаницы в процессе первичной классификации. Второй способ, посложнее, состоит в прослеживании, как перенумерация воздействует на результат. Если вы видите, что порядок перенумерации создает новые величины, которые будут изменены на следующем шаге, то вы, возможно, избежите проблем, выполняя процесс в обратном порядке. Если вы все же запутались, используйте первый метод или систему, которая отслеживает имена атрибутов или обрабатывает сами категории как имена таблиц атрибутов, а не отображает пронумерованные коды для атрибутов.
Вслучае векторов процесс переклассификации требует изменения, как атрибутов, так
играфики. Во-первых, надо удалить все линии, которые разделяют два класса, которые должны быть объединены. Эта операция называется растворением границ (line dissolve). Затем атрибуты этих двух полигонов переписываются для нового покрытия как единый новых атрибут для обоих. Давайте рассмотрим очень простой пример наподобие
предыдущего, но имеющий дело только с двумя полигонами, на одном пшеница, на другом кукуруза (Рисунок 15.1). Нашей целью является создание одной категории под названием "зерновые культуры" с помощью "растворения" (удаления) границы, разделяющей две исходные категории. Мы помещаем вновь созданную категорию "зерновые" в таблицу атрибутов и присваиваем ее новому, большему полигону. Теперь мы имеем новое покрытие с только одним значением атрибута. Конечно, в большинстве реальных случаев будет "растворено" гораздо больше границ и изменено гораздо больше атрибутов, но процесс будет таким же по сути как и в этом примере.
И в растровой, и в векторной переклассификации полигонов имеется интересная особенность. В обоих случаях по окончании мы имеем меньшее число категорий, чем имели вначале. Этот результат, называемый агрегированием данных (data aggregation), полезный и распространенный вид переклассификации. Представьте, как бы вы разделили больший полигон на части с пшеницей и кукурузой. Если у вас нет возможности сравнить эту информацию с другим покрытием, найти разделительную линию невозможно. И, конечно, если вы знаете, где она была, то вовсе не нужно выполнять анализа, вы можете просто использовать это покрытие с границей. Существуют полезные методы выделения большего количества деталей из грубой полигональной информации. Эти методы требуют сравнения двух или более покрытий в процессе, называемом наложением (overlay.
109

Рисунок 9.1. Переклассификация и растворение границ. Переклассификация через объединение категорий:
объединение классов "кукуруза" и "пшеница" в более крупный класс "зерновые".
До сих пор мы рассматривали переклассификацию данных лишь номинальной шкалы измерений. Нетрудно представить, как можно было бы переклассифицировать данные других шкал. В картографических методах это делается созданием диапазонов категорий данных, что часто называется ранжированными (range graded) классификациями. Такой сценарий требует от нас всего лишь перекодировать эти данные на основе классовых интервалов, в которые они попадают. И, как и в случае данных номинальной шкалы, мы просто перекодируем ячейки растра или выполняем замену атрибутов и растворение границ. Одновременно мы можем также выполнить такие операции, как упорядочивание ячеек растра или значений полигонов, их инверсию или использовать иные преобразования, включающие математические операции (умножение, деление и т.д.) над значениями полигонов с участием других переменных. При этом процесс по сути таков же, как и в случае с данными номинальной шкалы.
Все перечисленные до сих пор методы имеют одну общую черту. Процесс переклассификации направлен на переименовывание полигонов на основе значений атрибутов на их собственном месте. Это своего рода приземленный взгляд, в котором каждый набор ячеек растра или каждый полигон рассматривается как отчетливо индивидуальная сущность, а классификация ограничена целевой областью, как в использовании начальных значений, так и в самой переклассификации. Переклассификация на основе атрибутивной информации — только один из четырех основных методов; остальные основаны на информации о положении, размере и форме. Впрочем, эти представления не выделяются как отдельные методы: все они часто комбинируются друг с другом для создания широкого разнообразия методов переклассификации.
ОКРЕСТНОСТИ
Переклассификация на основе "негеометрических" атрибутов очень полезна, но она ограничивает нас атрибутами в пределах каждого объекта. Было бы замечательно, если бы мы могли классифицировать объекты по тому, как он расположен по отношению к другим. Такие процедуры переклассификации основаны на идее характеризования каждого объекта как части большей окрестности (neighborhood) объектов. Нам свойственно чаще взаимодействовать с теми, кто находится ближе, чем с теми, кто дальше. В некоторых случаях окрестности определяются политическими или экономическими критериями.
Окрестности могут определяться в терминах объединяющего атрибута всей области (такая классификация называется общим анализом соседства (total analysis of neighborhood)), или фокус может быть направлен на меньшие части всей территории – это целевой анализ. Целевой анализ, также называемый непосредственной окрестностью (immediate neighborhoods), включает только места, непосредственно прилегающие к целевой области или месту. Анализ общего соседства, называемый также расширенной окрестностью (extended neighborhoods), включает местоположения, которые находятся в непосредственной близости, а также и удаленные на некоторое расстояние. Рассмотрим на функции соседства,
110