

3.1.Краткая характеристика пр
Таблица 5
|
Техническая характеристика ПР «Циклон-5» | |
|
1. Число рук |
1 |
|
2. Грузоподъемность, кг |
5 |
|
3. Радиус рабочей зоны, мм наименьший Rmin наибольший Rmax |
960 1560 |
|
4. Наибольший горизонтальный ход руки, мм |
600 |
|
5. Высота оси руки от уровня пола, мм наименьшая наибольшая |
860 1110 |
|
6. Наибольший вертикальный ход руки, мм |
100 |
|
7. Наибольший угол поворота в горизонтальной плоскости, град |
180 |
|
8. Пределы установки угла положения каждой руки относительно продольной оси манипулятора, град |
30…15 |
ё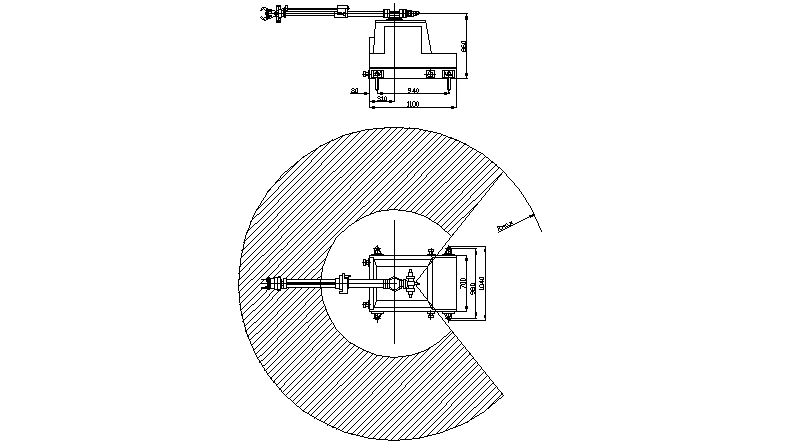 Общий
вид робота «Циклон-5» представлен на
рисунке 7.
Общий
вид робота «Циклон-5» представлен на
рисунке 7.
Рис. 7. Промышленный робот «Циклон-5».
4. Расчет и конструирование захватного устройства.
4.1 Выбор типа захватного устройства В промышленных роботах наиболее часто применяются механические ЗУ, которые удерживают объект с помощью сил трения или комбинации сил трения и запирающих усилий. Особенностью конструкции таких ЗУ является наличие рычажных, кулисно-рычажных, реечно-рычажных и клино-рычажных передаточных механизмов, а также использование сменных губок, обеспечивающих наилучшие условия наложения удерживающих связей на объект захвата. Захватное устройство представлено на рис.8.
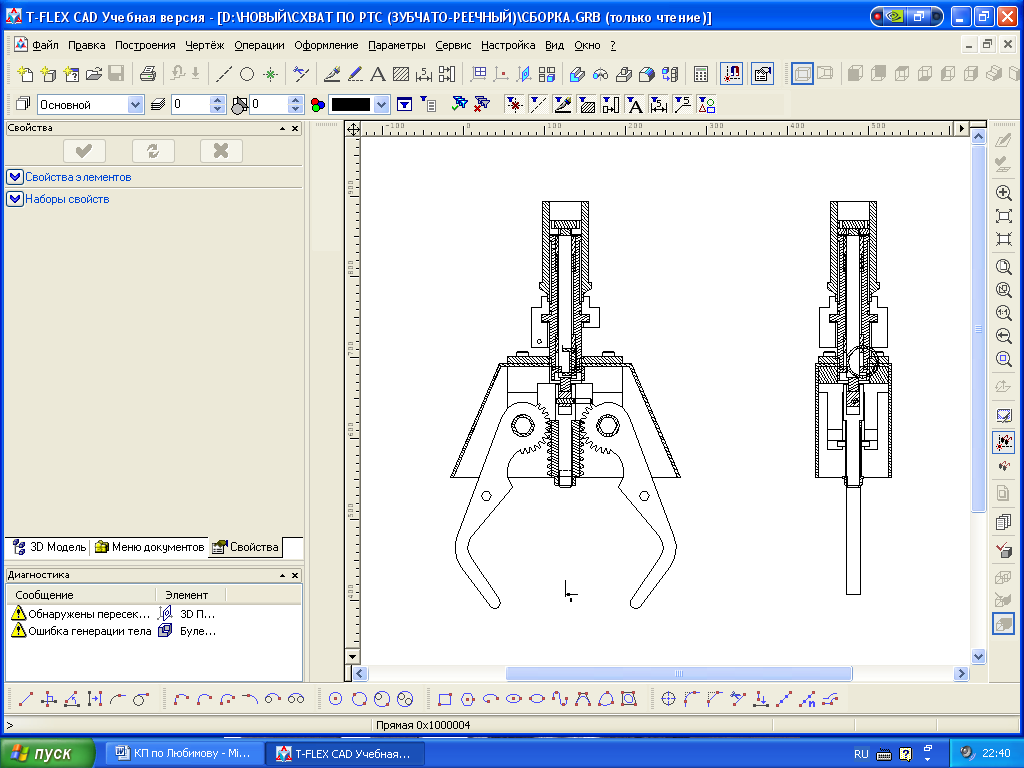
Рис. 8 Захватное устройство
4.2 Определение усилия захватного устройства
Захватное устройство является двухконтактным, поэтому можно рассчитывать усилие зажима из условия неповреждения детали. В данном случае деталь, после взятия ее со стола станка поворачивается на 90 и остается удерживаемой за счет сил трения. Выражения для сил взаимодействия в этом случае получаем из формул(2.96), (2.97)[3,с.79], полагая = 90.
![]()
где Rn – реакция на n–тую губку схвата;
i -угол между проекцией силы Rn на плоскость и силой Ni;
- коэффициент трения губки захвата с заготовкой, = 0,12 0,15.
![]() .
.
![]()
![]()
Минимальное усилие захвата заготовки вала равно 392 Н, так как используется захватное устройство с одной парой губок. Данное значение усилия не рекомендуется так как вал может выскользнуть из-за несоосности захвата детали губками.
4.3 Определение усилий привода
Рычажный механизм. Захватные устройства с рычажным механизмом получили широкое распространение, поскольку обеспечивают выигрыш в усилии зажима детали. Определение усилия привода определяется по формуле:
3,с.83
где Mj – удерживающий момент (Нм) для j–й губки;
-угол рычага, = 60;
p - коэффициент полезного действия механизма, p = 0,9 0,95;
b - размер рычага, b = 1,2 м.
![]()
где Ni – сила контакта, Н;
ai, ci - расстояния от точки поворота губки до –й точки контакта, м;
i - угол контакта,;
-
коэффициент трения меж ду
губкой и заготовкой;
ду
губкой и заготовкой;
m - число губок схвата.
Расчет:
![]()
![]()
![]()
4.4 Проверка отсутствия повреждений детали при захватывании
Формула для расчета контактных напряжений при захватывании заготовки губками захватного устройства:
![]()

где N - сила, действующая в месте контакта захвата с заготовкой;
Епр – приведенный модуль упругости материалов губки захвата и заготовки, Епр = 1,04 1011Н/м2;
l - ширина губки захвата, l = 30 мм;
d - диаметр заготовки, d = 105 мм.
![]()