

2.3. Требуемое число степеней подвижности
Число степеней подвижности – сумма возможных движений захватного устройства манипулятора без учета движения захвата детали.
Для захвата и перемещения заготовки на станок и детали со станка необходимо 4 степени свободы рис.4.
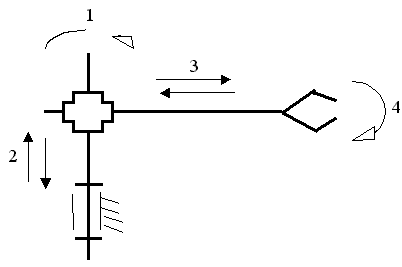
Рис.4. Число степеней подвижности.
Первая степень подвижности 1– поворот манипулятора вокруг своей вертикальной оси.
Вторая степень подвижности 2 – подъем, опускание манипулятора.
Третья степень свободы 3 – выдвижение руки.
Четвертая степень свободы 4 – поворот схвата вокруг своей продольной оси.
2.4. Выбор системы координат основных движений и структурно-кинематической схемы пр
Системой координат основных движений для данного робота будет полярная цилиндрическая система координат (рис. 5) где:
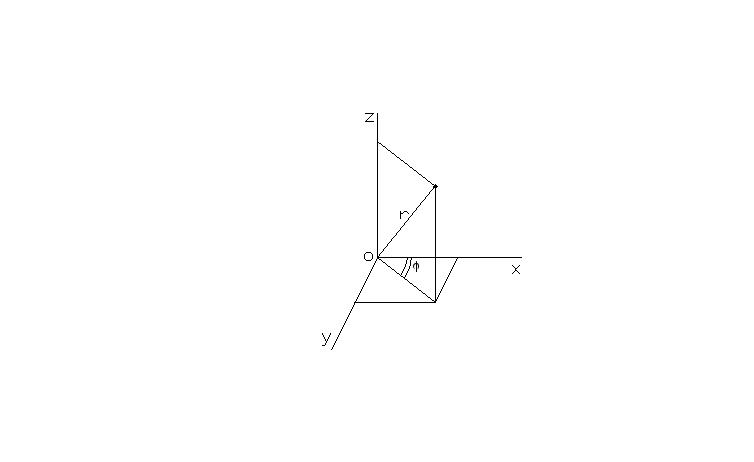
Рис. 5. Цилиндрическая система координат ПР.
2.5 Погрешность позиционирования пр
2.5.1 Преобразование координат для выбранной структурно-кинематической схемы
32
10
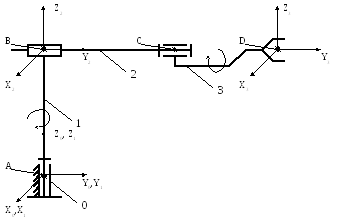
Рис. 6. Структурно – кинематическая схема ПР.
Координаты точки D последовательно преобразуем из системы 3 в 2, из 2 в 1, из 1 в 0. В матричной записи формула преобразования будет иметь вид
![]()
где R0 и R3 – матрицы исходных и заданных координат, а именно:
Матрица Т10
Матрица Т21
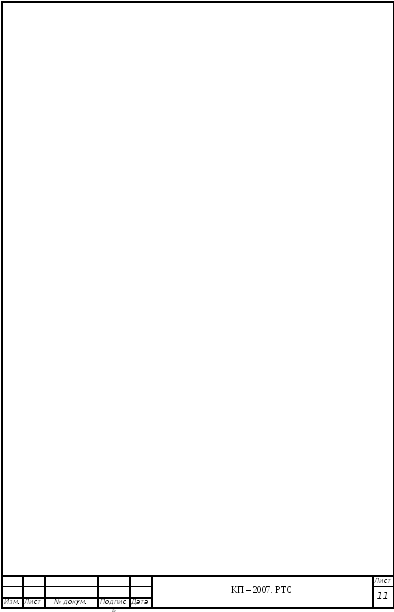
Матрица Т32
LAB = 860 мм + h,
где h = 100мм – вертикальный ход руки манипулятора
860 мм – это высота неподвижной части робота
LBD = LBC + LCD
где LBD – полная длина руки манипулятора от центра вращения в горизонтальной плоскости (LBD = Rmax)
LCD = Rmin = 960 мм – минимальный радиус рабочей зоны
LBC = L = 600 мм –горизонтальный ход руки.
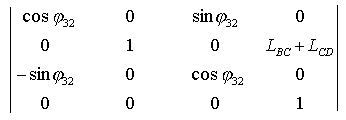
После перемножения матриц получим матрицу R0 вида:
Координаты точки схвата определяются по формулам:
X0 = -sin10 * LBD
Y0 = cos10 * LBD
Z0 = LAB
X0 = -sin10 * (960 мм + L)
Y0 = cos10 * (960 мм + L)
Z0 = 860 мм + h
2.5.2 Погрешность позиционирования
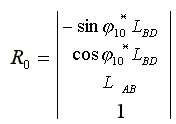
Линейную кинематическую ошибку определяем по формуле:
![]()

При линейных перемещениях φ10=0˚; L=600 мм;Δх0 = 0,1мм, Δy0 = 0,1мм, Δz0 = 0,1мм, то
Тогда
При повороте руки на 180˚: φ10=180˚; L=600 мм;Δх0 = 0,25мм, Δy0 = 0,25 мм, Δz0 = 0,25мм, то
 Тогда
Тогда
3 Расчет и конструирование механической системы пр
Промышленные роботы типа «Циклон-5» предназначены для автоматизации процессов загрузки и разгрузки технологического оборудования, межстаночного транспортирования и межоперационного складирования в механических заготовительных и других цехах.
Промышленный робот «Циклон-5 состоит из манипулятора и устройства циклового программного управления типа УЦМ-30. Для установки манипулятора на требуемой высоте от уровня пола используются винтовые домкраты.
Манипулятор является исполнительным механизмом ПР и включает в себя следующие основные сборочные единицы: 1) рука; 2) механизм подъема и поворота рук; 3) пневмосистема. Рука манипулятора выполнена в виде унифицированной конструкции, предназначенной для захвата, удержания, и ориентации в пространстве заготовок, деталей или технологической оснастки массой до 5 кг.
Для осуществления указанных выше операций механизм руки включает в себя приводы выдвижения и поворота кисти, а также захватное устройство (схват) с приводом зажима. Зажим и разжим схвата осуществляется сжатым воздухом.