

Контрольные вопросы
Основное достоинство Z-преобразования.
Что такое дискретная передаточная функция?
Как определяется дискретная передаточная функция, если известна весовая функция системы?
Назовите основной недостаток получения разностных уравнений системы по ее передаточной функции.
На что влияет шаг дискретизации?
Есть ли связь между порядками дифференциального и разностного уравнений?
Список длитературы
Изерман, Р. Цифровые системы управления: пер. с англ / Р. Изерман. – М.: Мир, 1984. – 541 с.
Лукас, В. А. Теория автоматического управления / В. А. Лукас. – М.: Недра, 1990. – 416 с.
Куо, Б. Теория и проектирование цифровых систем управления: пер. с англ. / Б. Куо. – М.: Машиностроение, 1986. – 448 с.
Плютто, В. П. Практикум по теории автоматического управления химико-технологическими процессами. Цифровые системы / В. А. Путинцев, В. М. Глумов – М.: Химия, 1989. – 168 с.
Бесекерский, В. А. Цифровые автоматические системы / В. А. Бесекерский – М.: Наука. Гл. ред. физ.-мат. мет., 1976. – 576 с.
П РИЛОЖЕНИЕ
А
РИЛОЖЕНИЕ
А
Таблица А.1 – Таблица Z-преобразований
|
№ |
x(t) |
X(p) |
x(i) |
X(z) |
|
1 |
1(t) |
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
|
|
|
|
5 |
|
|
|
|
|
6 |
|
|
|
|
|
7 |
|
|
|
|

П родолжение
таблицы А.1
родолжение
таблицы А.1
|
№ |
x(t) |
X(p) |
x(i) |
X(z) |
|
8 |
|
|
|
|
|
9 |
|
|
|
|
|
10 |
|
|
|
|
|
11 |
|
|
|
|
|
12 |
|
|
|
|
|
13 |
|
|
|
|

ПРИЛОЖЕНИЕ Б
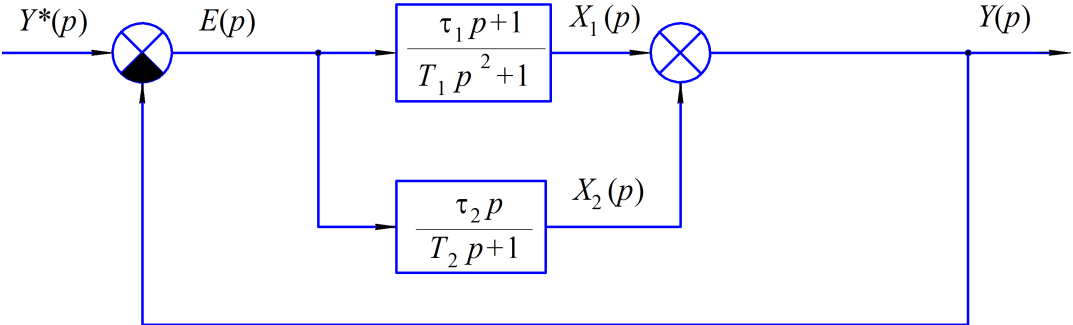
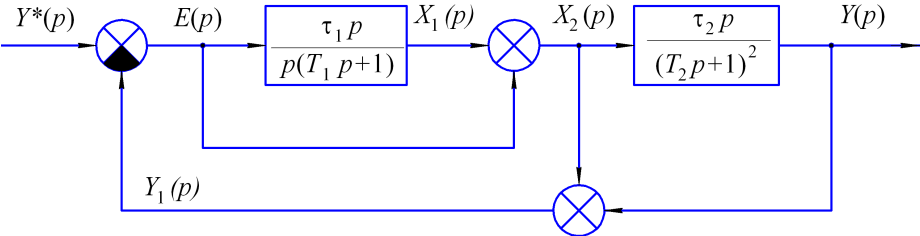
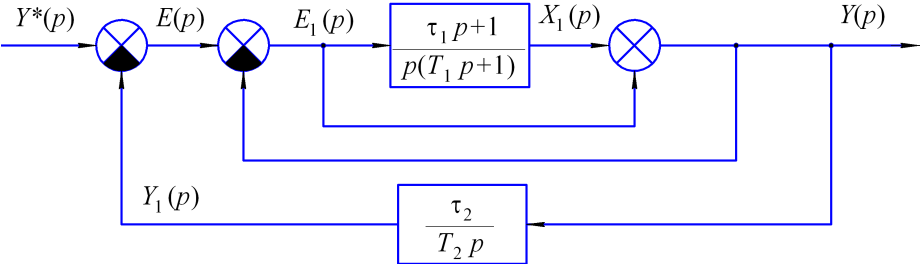
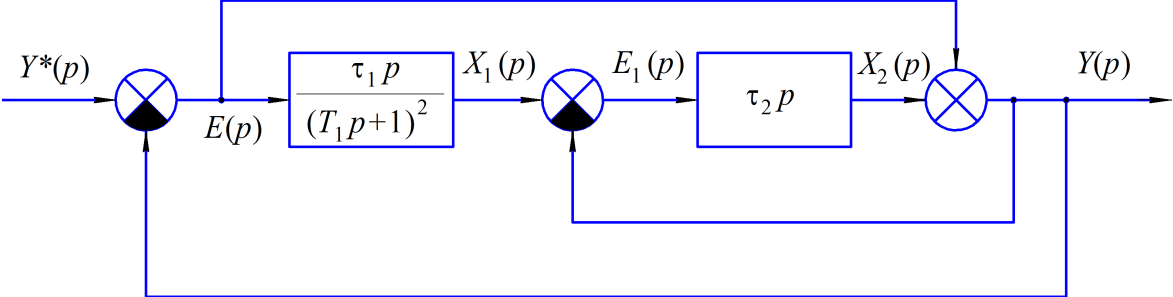
Таблица Б.1 – Структурные схемы САУ
|
№ |
Структурная схема |
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|

Продолжение таблицы Б.1
|
№ |
Структурная схема |
|
5 |
|
|
6 |
|
|
7 |
|
|
8 |
|




Составители
Галина Алексеевна Алексеева
Иван Владимирович Чичерин
Анализ устойчивости линейных Систем автоматического регулирования
Методические указания к лабораторной работе по курсу
Теория автоматического управления для студентов специальности
230201 "Информационные системы и технологии"
Печатается в авторской редакции
Подписано в печать . Формат 6084/16.
Бумага офсетная. Отпечатано на ризографе. Уч.-изд. л. 1,6.
Тираж экз. Заказ
ГУ КузГТУ. 650000, Кемерово, ул. Весенняя, 28.
Типография ГУ КузГТУ. 650000, Кемерово, ул. Д. Бедного, 4 А.