

Получение разностных уравнений цсу
Разностные уравнения ЦСУ получаются на основе математических моделей САУ. При этом возможны два способа:
получение разностных уравнений ЦСУ на основе передаточной функции САУ;
получение разностных уравнений ЦСУ в виде последовательности разностных уравнений ЦСУ в соответствии с ее структурной схемой.
Получение разностного уравнения ЦСУ по передаточной функции САУ осуществляется следующим образом:
По структурной схеме САУ и передаточным функциям ее элементов получают передаточную функцию системы Wc(p).
По Wc(p) восстанавливается дифференциальное уравнение САУ, либо формируется дискретная передаточная функция ЦСУWc(z).
По дифференциальному уравнению системы либо по ее дискретной передаточной функции получается разностное уравнение системы.
Недостаток данного способа состоит в получении разностных уравнений высокого порядка, что часто приводит к большим вычислительным ошибкам.
Получение разностного уравнения ЦСУ по структурной схеме САУ реализуется по следующей схеме:
Формируются разностные уравнения для динамических звеньев САУ, которые представляют собой в основном типовые динамические звенья.
Формируются уравнения связи, то есть разностные уравнения элементов сравнения и суммирования.
Строится алгоритм моделирования ЦСУ в виде алгоритма последовательного выполнения разностных уравнений в соответствии со структурной схемой САУ.
Примеры получения дискретных передаточных функций и разностных уравнений
Получение дискретной передаточной функции табличным методом
Получить дискретную передаточную функцию Wc(z) табличным методом, если
![]() .
.
Разделив числитель и знаменатель на величину 0,5, получим
![]() .
.
По таблице А.1 в приложении А имеем, что
![]() .
.
Тогда
![]() .
.
Разделив числитель и знаменатель на величину zполучаем, что
![]() . (27)
. (27)
Получение дискретной передаточной функции подстановкой Тастина
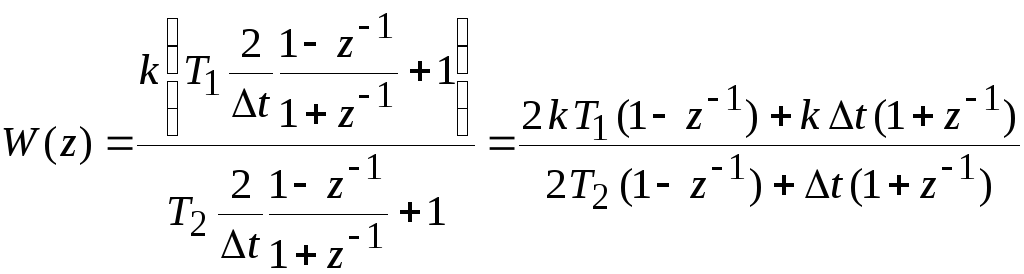
Получить дискретную передаточную функцию подстановкой Тастина (12) и разностное уравнение, если
![]() .
.
Сделав подстановку вида (12) имеем, что
 .
.
После преобразования имеем, что
 . (28)
. (28)
Введем следующие обозначения:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
В итоге дискретная передаточная функция
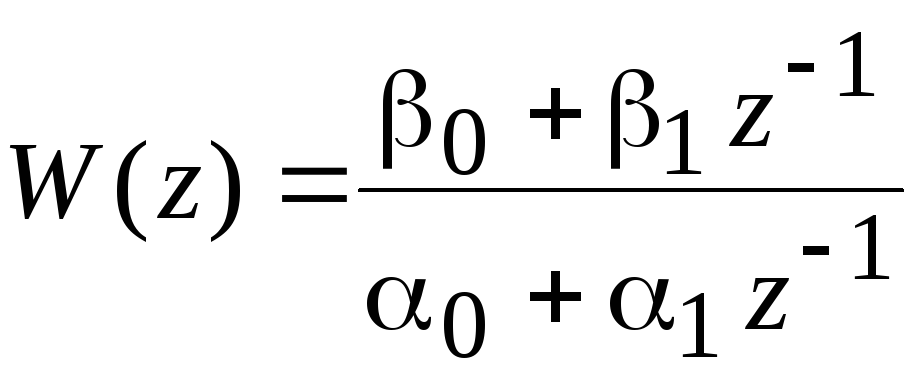 . (29)
. (29)
Получим теперь разностное уравнение для этого запишем уравнение (29) для Z-изображения:
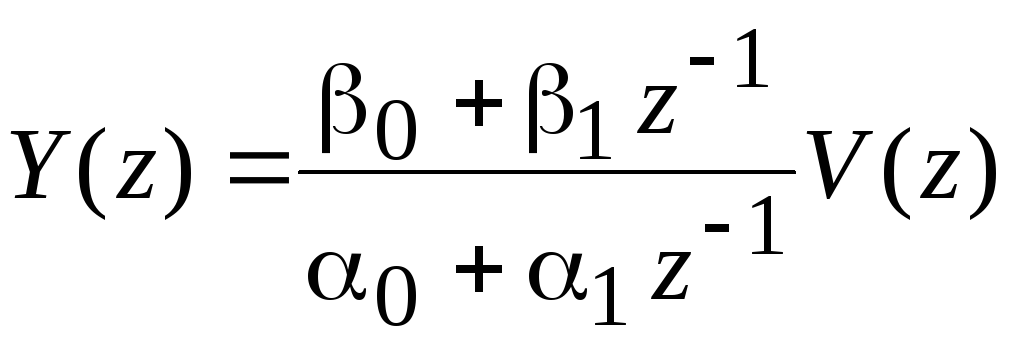 .
.
Умножив на знаменатель в правой части получим:
![]() .
.
Раскрыв скобки, получим, что
![]() .
.
Переходя во временную область, имеем
![]()
или
![]() .
.
Обозначив через
![]() ;
;
![]() ;
;
![]() ,
,
получаем разностное уравнение вида
![]() . (30)
. (30)
Получение разностного уравнения по дифференциальному уравнению
Получим разностное уравнение по его дифференциальному уравнению на примере апериодического звена первого порядка.
![]() , (31)
, (31)
где T – постоянная времени;
k – коэффициент передачи.
Заменив в (31) дифференциал левой разностью и перейдя к аналогу дискретного времени имеем, что
![]()
или
![]()
откуда
![]() , (32)
, (32)
где
![]() ;
;![]() .
.
Получение разностного уравнения на основе интегро-дифференциального
Получить разностное уравнение для ПИД-регулятора, описываемого интегро-дифференциальным уравнением вида:
 , (33)
, (33)
где U(t) – управляющее воздействие;
E(t) – ошибка рассогласования;
kР– коэффициент передачи регулятора;
TИ ,TД– постоянные интегрирования и дифференцирования.
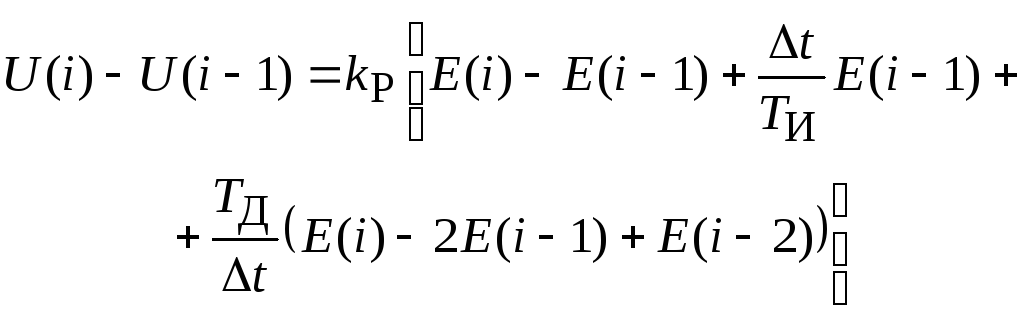
Заменим в (33) интеграл суммой (18), а дифференциал левой разностью (19). Тогда, перейдя к дискретному времени, имеем, что
 . (34)
. (34)
Запишем аналогичное выражение для момента времени i– 1

и вычтем его из (34). В результате получим уравнение
После преобразования получаем уравнение вида:

В итоге разностное уравнение ПИД-регулятора имеет вид:
![]() , (35)
, (35)
где
![]() ;
;![]() ;
;![]()