

Министерство образования и науки Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
"Кузбасский государственный технический университет"
Кафедра информационных и автоматизированных
производственных систем
Математическое описание цифровых систем управления
Методические указания к лабораторной работе по курсу
Основы теории управлениядля студентов специальности 230201 "Информационные системы и технологии"
Составители Г. А. Алексеева
И. В. Чичерин
Утверждены на заседании кафедры
Протокол № 5 от 02.02.2011
Рекомендованы к печати
учебно-методической комиссией
специальности 230201
Протокол № 275 от 11.03.2011
Электронная копия находится
в библиотеке ГУ КузГТУ
Кемерово 2011
Цель работы
Цель работы – изучение математических моделей цифровых систем управления (ЦСУ) и приобретение практических навыков в получении дискретных математических моделей в форме дискретных передаточных функций и разностных уравнений.
Основные теоретические положения
В работе рассматриваются способы построения дискретных математических моделей для элементов системы и для ЦСУ в целом на основе известных непрерывных математических моделей систем автоматического управления (САУ).
В качестве дискретных моделей рассматриваются разностные уравнения во временной области и дискретные передаточные функции в частотной области. Непрерывными математическими моделями являются во временной области дифференциальные и интегро-дифференциальные уравнения, а в частотной области – непрерывные передаточные функции.
Линейные разностные уравнения n-го порядка задаются соотношением
![]() , (1)
, (1)
где a1, …,an,b0,b1, …,bm– коэффициенты разностного уравнения;
y(i),v(i) – соответственно значения выходной и входной переменных в текущий момент времениti=iDt;
Dt– шаг дискретизации;
i– дискретный аналог текущего момента времени, являющийся безразмерной величиной, характеризующий номер текущего отсчета;
y(i– 1), …,y(i – n) – значения выходной переменной в предыдущие моменты времениti 1, …,ti n;
v(i – 1), …,v(i – m)значения входной переменной в предыдущие моменты времениti 1, …,ti m.
Разностные уравнения обладают важным преимуществом перед дифференциальными уравнениями, так как разрешенные относительно y(iDt) они уже в самой записи (2.2) содержат алгоритм решения, легко реализуемый на ЭВМ, так как представляют собой рекуррентную формулу расчета текущего значения выходной переменнойy(i).
![]() , (2)
, (2)
Дискретные передаточные функции получаются на основе Z-преобразования, которое в дискретном случае играет такую же роль, что и преобразование Лапласа в непрерывном случае.Z-преобразование тесно связано с дискретным преобразованием Лапласа. Эта связь определяется соотношением:
![]() , (3)
, (3)
где x*(t) – дискретная последовательность (решетчатая функция), задаваемая соотношением
![]() , (4)
, (4)
где (t – it) – смешенные дельта-функции, существующие только в моменты времениti = iDtи равные нулю при всех других значенияхt.
Пример дискретной последовательности x*(t)={x(it)} приведен на рисунке 1.
Недостатком дискретного преобразования Лапласа является наличие в выражении (3) трансцендентного сомножителя e–piDt, из-за которого преобразованиеX*(p) и дискретные передаточные функции становятся иррациональными функциями аргументаp, что создает трудности при их использовании.
С целью получения дискретной передаточной функции в дробно-рациональной форме, свойственной непрерывным системам вводят замену
![]() . (5)
. (5)
Тогда имеем, что
![]() . (6)
. (6)
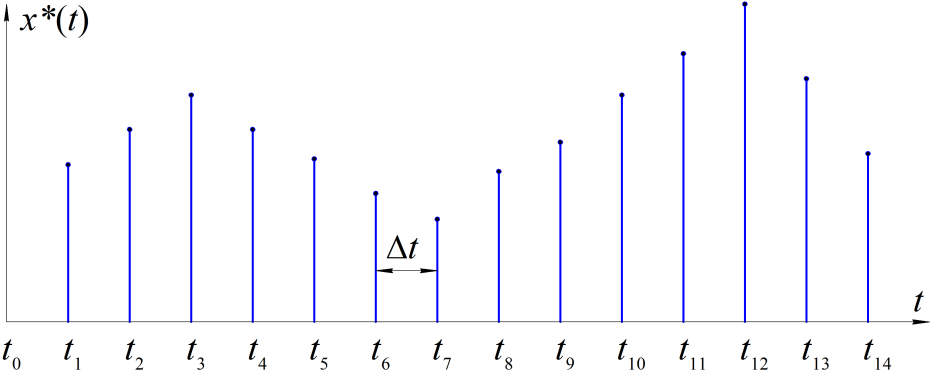
Рисунок 1 – Дискретная последовательность
Выражение (6) называется Z-преобразованием дискретной последовательностиX*(t).
Главное достоинство и удобство Z-преобразования состоит в том, что сама записьZ-преобразования (6) дает простой способ выполнения прямого и обратногоZ-преобразований:
1. Для нахождения Z-преобразования известной временной функцииx(t) необходимо ее каждое дискретное значениеx(iDt) умножить на (z - i), а затем свернуть получившийся ряд.
2. Для нахождения временной функции x(t) по известному Z-изображениюX(z), необходимоX(z) представить в виде степенного ряда по убывающей степени (z - i), получающиеся при этом числовые коэффициенты являются дискретными значениямиx(iDt) функцииx(t). В соответствии с данными правилами составлена таблица, содержащая наиболее часто употребляемые временные функции, их изображения по Лапласу иZ-изображения выходной последовательности кZ-изображению входной последовательности при нулевых начальных условиях, то есть
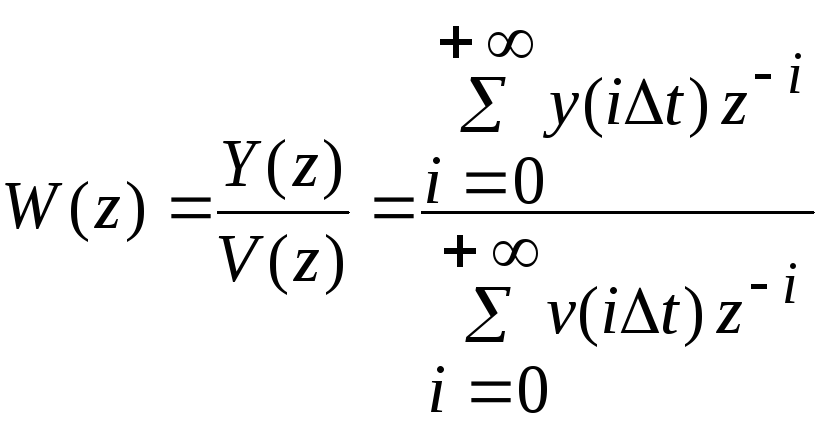 . (7)
. (7)
Если известно аналитическое выражение весовой функции, то
![]() . (8)
. (8)
Дискретная передаточная функция в дробно-рациональной форме имеет вид:
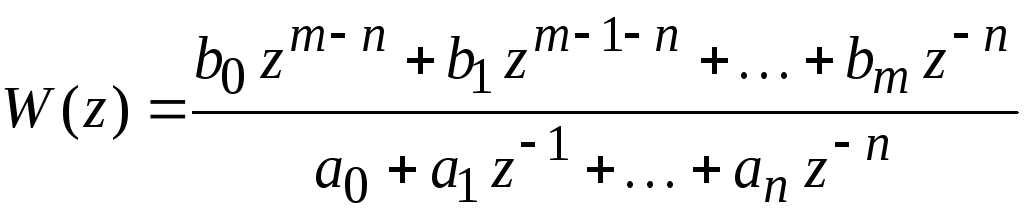 , (9)
, (9)
где z - 1 – есть временная задержка на один шаг дискретизации.