

MSC.Adams_Th_El-да
.pdfMSC.Adams:
ТЕОРИЯ И ЭЛЕМЕНТЫ ВИРТУАЛЬНОГО КОНСТРУИРОВАНИЯ И МОДЕЛИРОВАНИЯ
А.А.ИВАНОВ
2003
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |
|
ОГЛАВЛЕНИЕ |
|
1. |
История появления пакета MSC.Adams и его место среди CAD/CAE....................... |
3 |
2. |
Состав, структура и функциональные возможности основного пакета..................... |
5 |
3. |
Базовая система уравнений динамики в MSC.Adams .................................................. |
7 |
|
3.1. Система дифференциально-алгебраических уравнений ................................ |
7 |
|
3.2. Типовые связи, реализованные в пакете........................................................... |
8 |
4. |
База данных моделей в ADAMS: структура и основные операции.......................... |
11 |
|
4.1. О базах данных моделей ADAMS/View............................................................. |
11 |
|
4.2. Сессия ADAMS/View ............................................................................................ |
13 |
|
4.3. Хранение, импорт, экспорт ADAMS/View моделей и данных...................... |
16 |
|
4.4. Операции с моделями .......................................................................................... |
18 |
|
4.5. Навигатор базы данных ...................................................................................... |
20 |
5. |
Структура интерфейса ADAMS/View и основные инструменты ............................. |
22 |
|
5.1. Главное окно ADAMS/View ................................................................................ |
22 |
|
5.2. Начальные установки.......................................................................................... |
23 |
|
5.3. Виды модели и тел................................................................................................ |
30 |
|
5.4. Общий подход к освоению интерфейса............................................................ |
38 |
6. |
Элементы геометрического твердотельного конструирования в среде |
|
ADAMS/View ..................................................................................................................... |
41 |
|
|
6.1. Твердые тела.......................................................................................................... |
42 |
|
6.2. Создание деталей................................................................................................... |
43 |
|
6.3. Создание конструкционных форм..................................................................... |
44 |
|
6.4. Создание пространственных форм.................................................................... |
48 |
|
6.5. Создание сложных форм...................................................................................... |
51 |
|
6.6. Модификация деталей......................................................................................... |
56 |
|
6.7. Связь визуального конструктора с CAD пакетами....................................... |
57 |
7. |
Библиотека связей визуального конструктора............................................................ |
58 |
|
7.1. Идеальные соединения ........................................................................................ |
58 |
|
7.2. Создание и модификация простых идеальных шарниров........................... |
64 |
|
7.3. Работа со сложными идеальными шарнирами............................................... |
68 |
8. |
Базовый набор обобщенных сил и методы задания сил в ADAMS/View ................ |
72 |
|
8.1. Силы........................................................................................................................ |
72 |
|
8.2. Построение гибких соединений.......................................................................... |
76 |
|
8.3. Контактные силы ................................................................................................. |
76 |
9. |
Переменные в MSC.ADAMS ........................................................................................ |
81 |
|
9.1. Конструкционные переменные.......................................................................... |
81 |
|
9.2. О системных элементах....................................................................................... |
82 |
|
9.3. Управление равновесными значениями.......................................................... |
84 |
|
9.4. Создание переменных состояния....................................................................... |
84 |
|
9.5. Использование Differential Equations................................................................ |
87 |
Литература.......................................................................................................................... |
90 |
|
Приложение: Задание сил трения в шарнирах................................................................ |
91 |
|
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |
1. История появления пакета MSC.Adams и его место среди CAD/CAE |
3 |
1. История появления пакета
MSC.Adams и его место среди CAD/CAE
Теоретические основы компьютерного моделирования динамики системы твердых тел активно обсуждались в научной литературе начиная с 70-х годов [1, 2, 3, 4, 5]. На основе исследований и методов, разрабатывавшихся в эти и последующие годы, создавались программные продукты, некоторые из которых стали коммерческими и приобрели широкую из-
вестность. В 1990 году в сборнике "Multibody System Handbook" [6] приво-
дились сведения о программных продуктах для симулирования динамики системы твердых тел. Отдельная глава справочника была посвящена про-
грамме ADAMS™ (Automatic Dynamics Analysis of Mechanical Systems) –
одной из первых версий программного обеспечения, разработанного фир-
мой (MDI) Mechanical Dynamics, Inc..
В 2002 году фирма MDI вошла в состав корпорации MSC.Software (http://www.mscsoftware.com), одного из авторитетных производителей программного обеспечения для конструирования в машиностроении. В настоящее время (2003г.) под названием MSC.Adams 2003 распространяется 13-ая версия этого программного пакета, который является лидером среди пакетов по виртуальному функциональному прототипированию (разработке действующих компьютерных макетов) механических и мехатронных систем. Он используется крупнейшими авиакосмическими, автомобилестроительными, машиностроительными фирмами, занимая примерно 60 процентов рынка аналогичных программных продуктов. Среди преимуществ, предоставляемых пользователям пакета, – возможности интеграции пакета с наиболее популярными CAD/CAE системами (Pro/Engineer™, SolidWorks™, SolidEidge™, CATIA™, Autocad™), системами конечноэлементного анализа (MSC.Nastran™, ANSYS™, ABAQUS™, I-DEAS™),
универсальными системами компьютерного моделирования сложных сис-
тем (MSC.EASY5™, MATLAB™, MATRIXx™). В состав пакета входят специализированные модули, предназначенные для разработки и анализа сложных механических систем: автомобиля и его отдельных узлов
(ADAMS/Car™ , ADAMS/Tire™, ADAMS/Engine™), железнодорожных транспортных средств (ADAMS/Rail™), подвески самолетного шасси (ADAMS/Aircraft). Открытая структура пакета позволяет пользователю самостоятельно создавать специализированные настройки для семейства механических систем. Пакет локализован на всех основных существующих компьютерных платформах.
Основной базовый пакет модулей MSC.Adams, позволяющий собирать и анализировать модели, сложность которых ограничивается в основном возможностями компьютера, распространяется на льготных условиях для
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |
4 |
А.А.ИВАНОВ. MSC.Adams: теория и элементы виртуального конструирования и моделирования. |
некоммерческого использования в университетах. Подробная информация о пакете размещена в ИНТЕРНЕТ на сайте компании (http://www.mscsoftware.com), техническая поддержка эксплуатации обеспечивается на форуме для зарегистрированных пользователей, а также специальном образовательном сайте (universities.adams.com). Ежегодно проходят конференции пользователей MSC.Adams в Америке, Европе и Азии. Московское представительство MSC.Software Corporation проводит ежегодные конференции пользователей программных продуктов MSC.Software России, СНГ и других стран постсоветского пространства. MSC.Adams занимает достоиное место на этих форумах.
Являясь как пакетом для проведения исследования работоспособности концептуальных прототипов механических систем, так и интегрирующей средой разработки, исследования, оптимизации и идентификации сложных механических и мехатронных систем, MSC.Adams представляет мощный инженерно исследовательский инструмент. Он позволяет анализировать динамику систем тел, находящихся под действием внешних задаваемых сил и реакций внешних и внутренних связей, а также приводов, описываемых дополнительными дифференциально-алгебраическими соотношениями, управляемых алгоритмами и модулями, предназначенными для управления физическим устройством. В этом пособии Вашему вниманию предлагается информация о структуре базового пакета, его функциональных возможностях, теоретических основах построения математической модели механической системы, структурных элементах, используемых при построении механической модели, вычислительных методах, используемых в пакете, приемах работы при построении виртуального прототипа.
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |
2. Состав, структура и функциональные возможности основного пакета |
5 |
2. Состав, структура и функциональные возможности основного пакета
Основная часть пакета состоит из модулей ADAMS/View™, ADAMS/Solver™, ADAMS/PostProcessor™. Модули ADAMS/Solver™ и ADAMS/PostProcessor™ могут использоваться независимо для симулирования статики, кинематики и динамики механической системы и обработки результатов этого симулирования.
ADAMS/View™ является интегрированной оболочкой и предоставляет пользователю возможность:
•Создания новой модели механической системы, сохранения модели на любом этапе разработки, редактирования ранее сохраненных моделей, объединения нескольких ранее созданных моделей в одну.
•Экспорта данных для использования их отдельными модулями ADAMS™ в том числе и на вычислительных платформах, отличных от используемой.
•Импорта данных, созданных модулями ADAMS™ и другими CAD/CAM/CAE программными пакетами.
•Визуального 3D твердотельного конструирования с помощью встроенного редактора, имеющего все основные функции, присущие современным CAD системам.
•Выбора системы обобщенных координат из фиксированной библиотеки пакета.
•Использования пополняемых библиотек физических свойств конструкционных материалов.
•Использования библиотеки обобщенных сил и типовых стационарных и нестационарных связей.
•Параметризации механической модели.
•Создания новых переменных состояния, удовлетворяющих произвольным дифференциально-алгебраическим соотношениям.
•Задания сил, произвольно зависящих от внутренних и определенных пользователем параметров и переменных состояния.
•Использования встроенных вычислительных процедур для решения систем дифференциально-алгебраических уравнений, орга-
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |
6 |
А.А.ИВАНОВ. MSC.Adams:теория и элементы виртуального конструирования и моделирования |
|
низации вычислительного эксперимента и параметрической оптимизации механической модели.
•Использования встроенной библиотеки функций, содержащей элементарные математические функции, функции интерполяции и сглаживания дискретных данных, функции доступа к внутренним переменным механической модели, функции управления процессами моделирования и симулирования, функции чтениязаписи данных и результатов симулирования.
•Управления процессом симулирования в интерактивном режиме.
•Сохранения результатов конструирования для симулирования в пакетном режиме.
•Просмотра анимации симулируемого движения механической системы в режиме симуляции.
•Визуализации рассчитываемых зависимостей в процессе симулирования.
•Использования наборов инструментов для сопровождения базы данных создаваемой модели, конструирования тел, переменных и функциональных зависимостей.
•Просмотра результатов симулирования и обработки их в постпроцессоре.
•Сохранения анимаций в наиболее популярных растровых и клиповых форматах.
•Создания целевого пользовательского интерфейса (дополнительных пунктов меню и активных окон ввода текстовой информации).
•Создания пользовательских динамических библиотек функций, заменяющих или дополняющих функции встроенных библиотек пакета.
Представленный список лишь крупными мазками описывает наиболее существенные особенности пакета, о которых можно сказать, не вдаваясь в детали описания. В следующих разделах будут подробно обсуждаться теоретические основы механического ядра пакета, объекты и соглашения, а также приемы работы, используемые при построении виртуальной механической модели.
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |

3. Базовая система уравнений динамики в MSC.Adams |
7 |
3. Базовая система уравнений динамики в MSC.Adams
3.1. Система дифференциально-алгебраических уравнений
Основой для системы уравнений, описывающих динамику системы n твердых тел, находящихся под действием ma заданных сил и стесненных
mголономными связями, послужили уравнения в форме Эйлера-Лагранжа
смножителями
|
|
|
|
|
∂L |
|
ma |
|
|
|
∂r |
m |
∂Φj |
|
|
|||
|
pi |
= |
|
|
|
−∑λj |
, |
|
||||||||||
|
|
|
|
|
|
+∑Fj |
k |
|
|
|
||||||||
& |
|
|
∂q |
|
k =1 |
|
∂q |
j=1 |
∂q |
|
|
|||||||
|
|
|
|
|
|
i |
|
|
i |
i |
|
|
||||||
|
p |
− |
|
|
∂L |
|
= 0 , |
|
|
|
|
|
|
|
||||
& |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
ui |
− |
|
|
∂qi |
= 0 , |
|
|
|
i =1,..., 6n , |
|
|
||||||
|
|
qi |
|
|
|
|
|
|||||||||||
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Φj ({qα}, t) = 0 , j =1, m , |
|
|
||||||||||||
|
fk ({qα},{uβ},{λγ },t ) |
= 0 , |
k = |
|
. |
|||||||||||||
Fk − |
1,ma |
|||||||||||||||||
(1)
(2)
(3)
(4)
(5)
Для задания движения твердого тела используются инерциальные глобальные координаты его центра масс и углы Эйлера. По умолчанию ориентация определяется последовательными поворотами вокруг главных центральных осей тела 3-1-3 (для них в интерфейсе и документации пакета используется обозначение B313) на углы ψ – прецессии, θ – нутации, ϕ
– собственного вращения. Выбор одной из 24-х систем углов Эйлера должен быть сделан в процессе сборки модели, перед началом симуляции. Как известно из курса теоретической механики необходимость смены системы эйлеровых обобщенных координат, связана с вырождением матрицы связи проекций вектора угловой скорости на ортогональные оси и обобщенных скоростей.
Например, в случае системы углов (B313) оси, для проекций на оси связанные с телом, и обобщенных скоростей ψ& , θ&, ϕ&:
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |

8 |
А.А.ИВАНОВ. MSC.Adams: теория и элементы виртуального конструирования и моделирования. |
|||||||||||||
|
ωx |
|
sinψ sinθ |
cosϕ |
|
0 |
ψ |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
= |
|
|
−sinϕ |
|
|
|
& |
, |
(6) |
||
|
ωy |
cosϕsinθ |
|
0 |
θ |
|
||||||||
|
|
|
|
|
cosθ |
0 |
|
|
|
& |
|
|
|
|
|
ωz |
|
|
|
1 |
ϕ |
|
|
|
|||||
при угле нутации θ |
|
= 0 |
0 |
cosϕ |
0 |
ψ |
|
|
|
|
|
|||
|
|
|
ωx |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
−sinϕ |
|
|
& |
, |
|
|
(7) |
|
|
|
|
ωy |
= 0 |
0 |
θ |
|
|
|
|||||
|
|
|
|
|
|
0 |
|
|
& |
|
|
|
|
|
|
|
|
ωz |
1 |
1 |
ϕ |
|
|
|
|
|
|||
что не позволяет однозначно определить обобщенные скорости по проекциям угловой скорости и приводит к потере точности счета вблизи θ = 0.
Эта неприятность и может быть обойдена для конкретных режимов движения выбором другой системы углов Эйлера.
Проекции радиус-векторов точек, жестко связанных с телом, определяются с помощью ортонормальной матрицы преобразования от системы координат, связанной с телом, к глобальной (Gl) системе координат
|
cosψ cosϕ −sinψ cosϕcosθ |
−cosψ sinϕ −sinψ cosϕcosθ |
sinψ sinθ |
|
||
Gl |
|
|
−sinψ sinϕ +cosψ cosϕcosθ |
|
|
(8) |
A |
= sinψ cosϕ +cosψ sinϕcosθ |
−cosψ sinθ . |
||||
|
|
sinϕsinθ |
cosϕsinθ |
cosθ |
|
|
|
|
|
|
|||
3.2. Типовые связи, реализованные в пакете
Для описания уравнений голономных связей (5) в пакете используются примитивные связи, задаваемые следующими соотношениями:
1) Совпадение точек двух тел (Atpoint) |
|
Φ =(Ri + rik ) −(Rj + rjk ) = 0 . |
(9) |
Это соотношение определяет три голономные связи типа (4) и используется для задания шарниров с фиксированной позицией (цилиндрического шарнира вращения, сферического шарнира, универсального шарнира).
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |
3. Базовая система уравнений динамики в MSC.Adams |
9 |
||
2) Движение точки в плоскости (Inplane) |
|
||
Движение точки тела i в плоскости, принадлежащей телу |
j и прохо- |
||
дящей через точку |
|
j + rjk перпендикулярно вектору aj : |
|
R |
|
||
Φ =(( |
|
|
|
|
|
Ri +rik ) −(Rj +rjk )) aj =0 . |
(10) |
||||
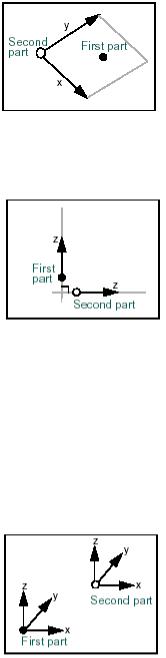
3) Перпендикулярность отрезков в телах (Perpendicular)
Φ = ai a j = 0 . |
(11) |
4) Фиксированная ориентация (Orientation)
Фиксированная ориентация систем координат в первом i и втором j те-
лах разрешает относительное поступательное перемещение тел, образуется из двух соотношений (11) и добавляет в систему уравнений движения две голономные связи
{ai |
|
j , ai cj} =0. |
|
b |
(12) |
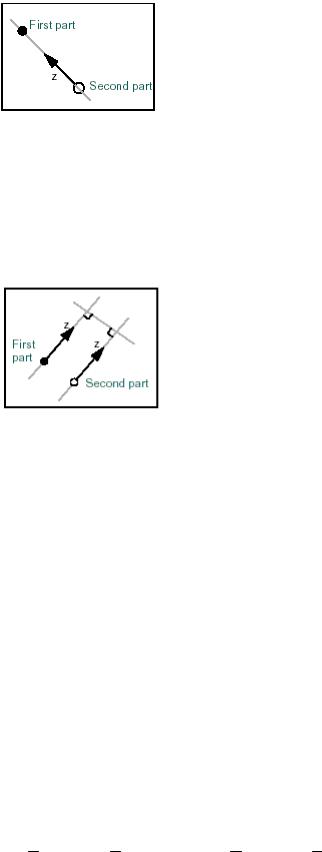
5) Движение по прямой (Inline)
Точка, принадлежащая первой части, может двигаться только вдоль прямой, принадлежащей второй части. Это условие образуется из двух условий (10). Условие используется при необходимости наложении связи типа подвижный вращательный шарнир
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |
10 |
А.А.ИВАНОВ. MSC.Adams: теория и элементы виртуального конструирования и моделирования. |
{(( |
|
|
|
|
|
|
|
|
|
Ri +ri)−(Rj +rj)) xj,((Ri +ri)−(Rj +rj )) yj}=0. |
(13) |
||||||||
6) Параллельное движение (Parallel)
Ось z маркера, принадлежащего одной части, параллельна оси z маркера, принадлежащего второй части соединения.
{zi xj , zi yj} =0 . (14)
С помощью рассмотренных примитивов могут быть описаны типовые шарниры:
1.Цилиндрический шарнир образуется из примитивов Atpoint и двух условий перпендикулярности zi орта оси маркера первого тела и ортов осей xj и y j маркера второго тела:
{(( |
|
|
|
|
|
Ri +ri ) −(Rj +rj )), zi xj , zi yj} =0 |
(15) |
||||
2.Универсальный шарнир состоит из условия совпадения точек соединяемых тел и ортогональности ортов zi и z j :
{(( |
|
|
|
|
|
Ri +ri ) −(Rj +rj )), zi zi} =0. |
(16) |
||||
3.Поступательный шарнир образуется условиями движения точки по прямой, образованной пересечением двух плоскостей, принадлежащих второму телу, и трех условий ортогональности, обеспечивающих параллельность одноименных ортов маркеров, принадлежащих соединяемым телам:
{((Ri +ri ) −(Rj +rj )) xj , ((Ri +ri ) −(Rj +rj )) yj , zi xj , zi yj , xi yj} =0
. (17)
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |