

MSC.Adams_Th_El-да
.pdfПриложение: Задание трения в шарнирах |
91 |
Приложение: Задание сил трения в шарнирах
Оператор FRICTION
Оператор FRICTION задает параметры для сил трения в поступательном, вращательном, поступательно-вращательном, гуковом, универсальном и сферическом шарнирах.
Замечание: JOINT оператор дает опции для задания трения в поступательном и вращательном шарнирах. ADAMS/Solver поддерживает динамическое и статическое трение.
ФОРМАТ |
Аргументы общего назначения |
Аргументы шарнира |
|
|
Translational joint |
|
|
[,FRICTION_FORCE_PRELOAD=r |
|
|
,REACTION_ARM=Rn |
|
|
,INITIAL_OVERLAP=Xs0 |
|
|
,OVERLAP_DELTA={INCREASE, |
|
|
DECREASE,CONSTANT}] |
|
|
|
FRICTION/id, |
,MU_STATIC=r |
Revolute joint |
[,FRICTION_TORQUE_PRELOAD=r |
||
JOINT=id |
,MU_DYNAMIC=r |
,FRICTION_ARM=Ra |
|
||
|
[,INACTIVE=STATIC |
,PIN_RADIUS=Rp] |
|
,STICTION_TRANSITION-VELOCITY=r |
|
|
,MAX_STICTION_DEFORMATION=r |
Cylindrical joint |
|
,EFFECT={ALL,[[STICTION,SLIDING]]} |
[,FRICTION_FORCE_PRELOAD=r |
|
,INPUTS={ALL,NONE |
,FRICTION_TORQUE_PRELOAD=r |
|
,[[PRELOAD:REACTION_FORCE: |
,PIN_RADIUS=Rp |
|
BENDING_MOMENT: |
,INITIAL_OVERLAP=Xs0 |
|
TORTIONAL_MOMENT]]} |
,OVERLAP_DELTA={INCREASE, |
|
|
DECREASE,CONSTANT}] |
|
|
|
|
|
Universal/Hooke joint |
|
|
{I_YOKE,J_YOKE} |
|
|
[,FRICTION_TORQUE_PRELOAD=r |
|
|
, PIN_RADIUS=Rp |
|
|
, FRICTION_ARM=Ra] |
|
|
Spherical joint |
|
|
[,FRICTION_TORQUE_PRELOAD=r |
|
|
,BALL_RADIUS=Rb ] |
{ } Выбрать один из параметров [ ] Выбрать дополнительный параметр
[[ ]] Дополнительно выбрать комбинацию параметров
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |
92 |
А.А.ИВАНОВ. MSC.Adams: теория и элементы виртуального конструирования и моделирования. |
Описание аргументов
BALL_RADIUS=Rb
Задает радиус сферы в сферическом шарнире для использования при вычислении силы и момента трения.
По умолчанию (Default): 1.0
Диапазон изменения (Range): BALL_RADIUS > 0
STICTION_TRANSITION_VELOCITY=r
Определяет абсолютную величину пороговой скорости чувствительности при переходе от динамического к статическому трению. Если абсолютное значение относительной скорости маркера шарнира меньше STICTION_TRANSITION_VELOCITY, , то трение покоя или статическое трение действуют, так чтобы препятствовать движению.
По умолчанию (Default): 0.1 (единица длины)/(единица времени) на поверхности контакта в шарнире.
Диапазон (Range): STICTION_TRANSITION_VELOCITY > 0
EFFECT={ALL[[STICTION, SLIDING]]}
Задает включение эффектов трения в модель.
Stiction – статическое трение учитывается, sliding – динамическое трение. Исключение статического трения в симуляциях, которые не требуют его учета, значительно улучшает скорость симуляции.
По умолчанию (Default): All
FRICTION_FORCE_PRELOAD=r
Задает преднапряженную силу трения в шарнире, которая обычно вызвана механическим люфтом в сборке шарнира.
Default: 0.0
Range: FRICTION_FORCE_PRELOAD .0
MAX_STICTION_DEFORMATION=r
Задает максимальное смещение допустимое в шарнире при действии сил статического трения. Слабая деформация позволяет ADAMS/Solver легко удовлетворить условию Кулона для статического трения, например так как
Friction force magnitude < µ static * normal force.
Следовательно, даже при нулевой скорости возможно приложение конечной силы статического трения, если динамика системы требует этого.
Default: 0.01 length units
Range: MAX_STICTION_DEFORMATION > 0
MU_DYNAMIC=r
Задает коэффициент динамического трения. Величина силы трения:
Friction_force_magnitude = F = µN, где µ = MU_DYNAMIC, а N = normal force
Сила динамического трения действует в противоположном направлению скорости в шарнире направлении.
Default: none
Range: MU_DYNAMIC > 0
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |
Приложение: Задание трения в шарнирах |
93 |
MU_STATIC=r
Задает коэффициент статического трения в шарнире. Величина верхней границы величины силы трения покоя:
Friction_Force_Magnitude = F = µN, где µ = MU_STATIC, а N = normal force
Сила статического трения действует в противоположном силам или моментам направлениям вдоль степеней свободы шарнира.
Default: none
Range: MU_STATIX 0
OVERLAP_DELTA={INCREASE, DECREASE, CONSTANT}
Для задания трения в шарнире скольжения (поступательный (Translational) или посту- пательно-вращательный (Cylindrical) шарнир, ADAMS/Solver вычисляет перекрытие шарнира. В процессе скольжения в таком шарнире, перекрытие может увеличиваться, уменьшаться или оставаться постоянным. OVERLAP_DELTA используется для задания этих изменений в перекрытии.
INCREASE указывает на то, что перекрытие возрастает с перемещением I-маркера (I Marker) в положительном для J-маркера (J Marker) направлении; ползун перемещается внутрь шарнира.
DECREASE указывает на то, что перекрытие возрастает с перемещением I-маркера (I Marker) в положительном для J-маркера (J Marker) направлении; ползун перемещается из шарнира.
CONSTANT указывает на неизменность перекрытия, ползун весь остается в шарнире. Default: CONSTANT
PIN_RADIUS=Rp
Задает радиус оси для Revolute, Cylindrical, Hooke, or Universal шарнира. Default: 1.0
Range: PIN_RADIUS > 0
REACTION_ARM=Rn
Задает эффективное плечо момента шарнирной реакции относительно трансляционной оси the оси поступательного (translational) шарнира (z-направление J marker'а шарнира). Это значение используется для вычисления вклада торсионного момента в множество сил трения.
Default: 1.0
Range: REACTION_ARM > 0
FRICTION_TORQUE_PRELOAD=r
Задает момент преднагруженного трения обычно вызываемый механическим люфтом в шарнире.
Default: 0.0
Range: FRICTION_TORQUE_PRELOAD .0
I_YOKE
J_YOKE
I_YOKE и J_YOKE задают направления осей вращения на которых действует оператор FRICTION. I_YOKE указывает учет трения на оси I маркера (I marker’s rotational constraint) так же как J_YOKE указывает учет трения на оси J маркера (J marker’s rotational constraint). Ключевые слова имеют смысл только для шарнира Гука и универсального шарнира (Hooke и UNIVERSAL).
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |
94 |
А.А.ИВАНОВ. MSC.Adams: теория и элементы виртуального конструирования и моделирования. |
Приложение сил трения в шарнирах
Здесь приводятся графические описания и блок-диаграммы режимов трения, доступных для моделирования в шарнирах с помощью оператора FRICTION.
Для изучения блок-диаграмм и режимов трения смотрите:
Соглашения в блок-диаграммах стр. 94.
Режимы трения см. стр. 95.
Для нахождения информации о конкретном шарнире смотрите:
Поступательный шарнир (Translational Joint) на стр. 95
Вращательный шарнир (Revolute Joint) на стр. 95 Поступательно-вращательный (Cylindrical Joint) на стр. 96 Универсальный/Гука шарнир (Universal/Hooke Joint) на стр. 96
Сферический шарнир (Spherical Joint) на стр. 97
Соглашения в блок диаграммах
Таблица 1 – описывает связь между INPUTS аргументами в FRICTION операторе и ключами, используемыми в блокдиаграммах. 2 – обозначения в диаграммах.
Таблица 1. Связь между аргументами INPUTS и ключами в блок-диаграммах
Ключ: |
INPUTS =: |
Символ: |
Принимаемое |
|
|
|
значение: |
SW1 |
PRELOAD |
Fprfrc or Tprfc |
ON/OFF |
SW2 |
REACTION FORCE |
Fst or Fdyn |
ON/OFF |
SW3 |
BENDING MOMENT |
Tr |
ON/OFF |
SW4 |
TORSIONAL MOMENT |
Tn |
ON/OFF |
ALL /NONE устанавливает все допустимые ключи в состояние
ON/OFF, соответственно
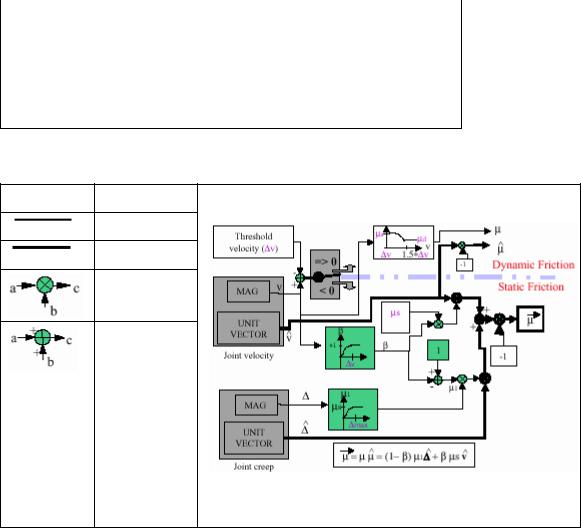
Таблица 2. Обозначения блок-диаграммы и диаграмма
Обозначение Описание обозначения
Скалярная
величина
Векторная
величина
Узел
перемножения a×b=c
|
Узел сложе- |
|
ния |
|
a+b=c |
|
|
MAG |
Величина |
|
вектора |
ABS |
Абсолютная |
|
величина |
|
скаляра |
FRD |
Определение |
|
режима тре- |
|
ния |
|
(Friction Re- |
|
gime |
|
Determination) |
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |
Приложение: Задание трения в шарнирах |
95 |
Режимы трения
При моделировании сухого трения в ADAMS допускается существования трех режимов трения. Полагается, что в шарнире реализуется динамическое трение, если величина скорости в шарнире превышает в полтора раза скорость перехода к трению покоя. Для вычисления силы трения используется коэффициент динамического трения ( d ). Если
скорость в шарнире от одной до полутора скорости перехода к трению покоя, шарнир рассматривается как находящийся в переходном режиме между ста-
тическим и динамическим трением. Для вычисления промежуточного между динамическим ( d ) и статическим ( s ) значения коэффициента трения используется функция
STEP. Шарнир считается, находящимся в режиме статического трения если скорость перемещения в шарнире меньше скорости перехода к статическому трению. Эффективный коэффициент трения вычисляется с использованием шарнирного сползания и шарнирной скорости и статического коэффициента трения ( s ). Скорость в шарнире
определяет мгновенный режим трения. Таблица 2 на стр. 94 показывает блокдиаграмму режимов трения допустимых в ADAMS/Solver.
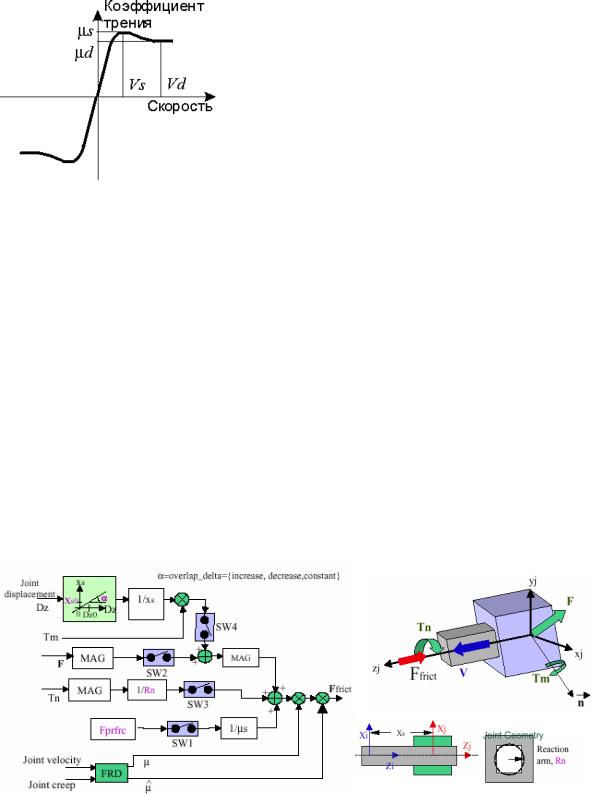
Поступательный шарнир (Translational Joint)
Реакция в шарнире (F), изгибающий момент (Tm), скручивающий (torsional) момент (Tn), и сила преднагружения (Fprfrc) используются для вычисления силы трения в трансляционном (TRANSLATIONAL) шарнире. М отдельно включать эффекты, переключая ключи SW1 – SW4. Изгибающий момент (Tm) конвертируется в эквивалентную силу использованием Xs блока. , скручивающий момент конвертируется в эквивалентную шарнирную силу с использованием плеча трения (Rn). (Ffrict) прикладывается вдоль оси перемещения в направлении, вычисляемом блоком FRD.
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |
96 |
А.А.ИВАНОВ. MSC.Adams: теория и элементы виртуального конструирования и моделирования. |
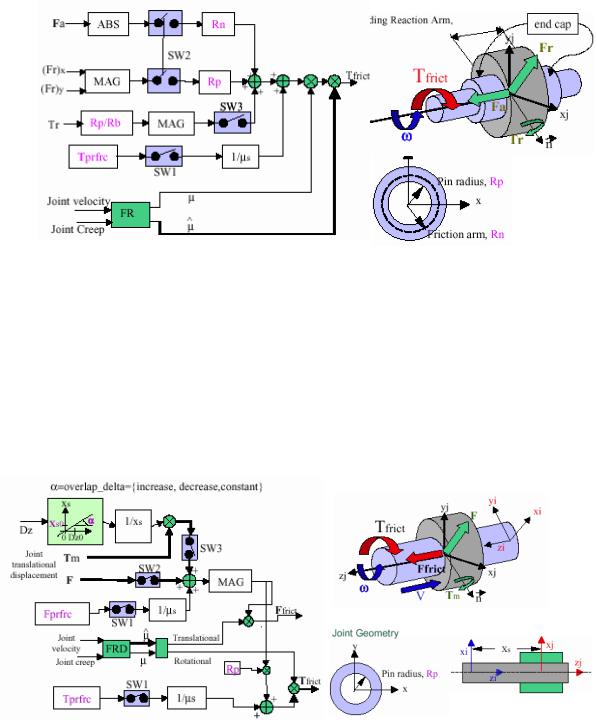
Вращательный шарнир (Revolute Joint)
Реакции шарнира (Fa и Fr), изгибающий момент (Tr) и момент преднагружения (Tprfrc) определяют момент трения во вращательном (revolute) шарнире. Вы можете отключать одну или несколько этих силовых эффектов, используя ключи SW1 – SW3. Шарнирные реакции (Fa и Fr) конвертируются в эквивалентные моменты с использованием плеча трения (Rn) и радиуса оси (Rp). Момент трения (Tfrict) прикладывается вдоль оси вращения в направлении, вычисляемом блоком FRD.
Поступательно-вращательный шарнир (Cylindrical Joint)
Силовая реакция шарнира (F) и моментная реакция (Tm) комбинируются с преднагружающей силой (Fprfrc) и моментом (Tprfrc). Согласно блок-диаграмме можно отключать различные эффекты, используя ключи SW1 – SW3. Силы трения в шарнире действуют на поверхностях. FRD блок определяет направление силы трения. Основываясь на понятии направления коэффициента трения, сила поверхностного трения разбивается на эквивалентные момент и силу трения, действующие вдоль оси шарнира.
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |
Приложение: Задание трения в шарнирах |
97 |
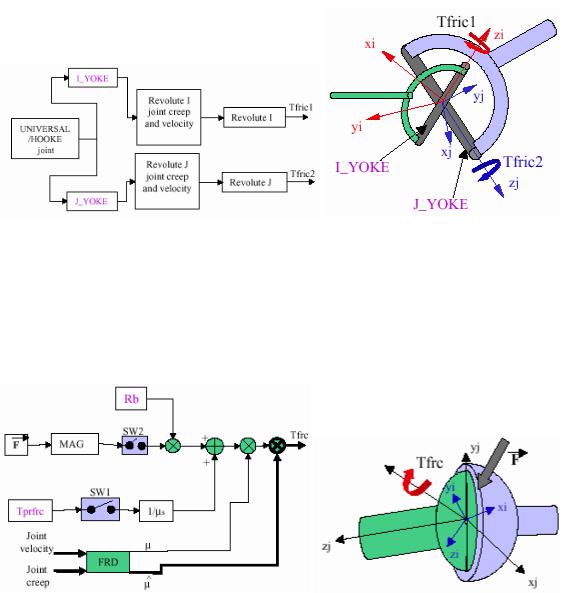
Универсальный/Гука шарнир (Universal/Hooke Joint)
Универсальный/Гука (UNIVERSAL/HOOKE) шарнир содержит две оси (два поводка или руля) (I_YOKE и J_YOKE), которые моделируются независимо. Эквивалентный вращательный (revolute) шарнир представляет каждый руль. Момент трения прикладывается вдоль каждой из осей двух рулей.
Сферический (Spherical Joint)
Сила реакции (F) и преднагруженный момент трения (Tprfrc) – два силовых эффекта используемых при вычислении момента в сферическом (SPHERICAL) шарнире. Радиус сферы используется для вычисления эквивалентного момента трения. FRD блок определяет направление момента сил трения.
MSC.Software Corporation |
Тел. (095) 363-06-83, 254-57-10 |
123056, Москва, ул. Зоологическая, 26, стр. 2 |
Факс: (095) 787-76-06, e-mail: sergey.sergievskiy@mscsoftware.com |