

Вопрос 4 – Расчет прессовых соединений в результате сборки прессового соединения за счет натяга на сопрягаемых поверхностях возникают контактные давления р,
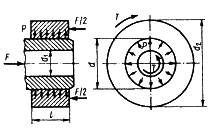
которые равномерно распределены по поверхности контакта. Если на конструкцию действует осевая сила F и вращающий момент T , то на сопрягаемых поверхностях возникнут силы трения, которые должны исключить относительное смещение деталей соединения. Пользуясь принципом независимости действия сил, можем написать условия равновесия:
![]() ,
,
![]() ,
(1)
,
(1)
где
![]() —
коэффициент сцепления; для стальных и
чугунных деталей:
—
коэффициент сцепления; для стальных и
чугунных деталей:![]() =
0,08...0,1 при запрессовке;
=
0,08...0,1 при запрессовке;![]() =0,12...0,14
при сборке с нагревом или охлаждением;
=0,12...0,14
при сборке с нагревом или охлаждением;![]() =
0,12 при гидропрессовании; если одна из
деталей латунная или бронзовая, то
=
0,12 при гидропрессовании; если одна из
деталей латунная или бронзовая, то![]() =
0,05.
=
0,05.
Из вышеуказанных условий равновесия определим минимально необходимые значения контактного давления:
![]() ,
,
![]() .
(2)
.
(2)
Если осевая сила F и вращающий момент Т действуют одновременно, то расчет ведут по равнодействующей R осевой и окружной силы:
![]() ,
т.е.
,
т.е.
![]() ,
(3)
,
(3)
тогда
![]() (4)
(4)
В
зависимости от ответственности соединения
полученное минимально необходимое
значение
![]() увеличивают,
умножая его на коэффициент запаса
сцепления К = 1,5...3. По найденному расчетному
контактному давлению
увеличивают,
умножая его на коэффициент запаса
сцепления К = 1,5...3. По найденному расчетному
контактному давлению![]() определяем
расчетный натягNp
, пользуясь
выводимой в вузовских курсах «Сопротивления
материалов» формулой Ляме для расчетов
толстостенных цилиндров (цилиндр
считается толстостенным, если его
средний радиус превышает толщину стенки
не более чем в пять раз):
определяем
расчетный натягNp
, пользуясь
выводимой в вузовских курсах «Сопротивления
материалов» формулой Ляме для расчетов
толстостенных цилиндров (цилиндр
считается толстостенным, если его
средний радиус превышает толщину стенки
не более чем в пять раз):
![]() ,
(5)
,
(5)
где
![]() ;
;
![]() ;
;
![]() ,
,
![]() ,
и
,
и![]() ,
,![]() —модули
упругости первого рода и коэффициенты
Пуассона соответственно для материалов
охватываемой и охватывающей деталей:
для стали
—модули
упругости первого рода и коэффициенты
Пуассона соответственно для материалов
охватываемой и охватывающей деталей:
для стали![]() =
0,3, для чугуна
=
0,3, для чугуна![]() =
0,25, для бронзы
=
0,25, для бронзы![]() =
0,33. Учитывая возможное нарушение
микрогеометрии контактных поверхностей
при сборке прессового соединения,
полученное значение расчетного натягаNp
увеличивают
на
=
0,33. Учитывая возможное нарушение
микрогеометрии контактных поверхностей
при сборке прессового соединения,
полученное значение расчетного натягаNp
увеличивают
на
![]() =1,2 ( Rz
1
+ Rz
2
) — поправка
на срезание и сглаживание микронеровностей,
где Rz
1и
Rz
2—
высоты микронеровностей по десяти
точкам, тогда требуемый натяг N
Т
= Np
+ u (если сборку
выполняют нагреванием или охлаждением
деталей, то и = 0).
=1,2 ( Rz
1
+ Rz
2
) — поправка
на срезание и сглаживание микронеровностей,
где Rz
1и
Rz
2—
высоты микронеровностей по десяти
точкам, тогда требуемый натяг N
Т
= Np
+ u (если сборку
выполняют нагреванием или охлаждением
деталей, то и = 0).
По величине требуемого натяга NT подбирают стандартную посадку, при котором NT = Nmin (посадку подбирают по наименьшему натягу).
При сборке прессового соединения с нагревом охватывающей или охлаждением охватываемой детали разность их температур t определяется по формуле
![]() ,
(6)
,
(6)
где
Nmax
— наибольший
натяг выбранной посадки; zc
— зазор, необходимый для свободного
соединения деталей, принимаемый равным
10 мкм при d = 30...80 мм, 15 мкм при d
свыше 80 до
180 мм и 20 мкм при d
свыше 180 до
400 мм, где d —
номинальный диаметр соединяемых
поверхностей;
![]() —
коэффициент линейного расширения.
—
коэффициент линейного расширения.
Вопрос 5 – Упругие элементы. Назначение. Классификация. Выбор материалов. Расчет.
Упругими элементами называют детали машин, работа которых основана на способности изменять свою форму под воздействием внешней нагрузки и восстанавливать ее в первоначальном виде после снятия этой нагрузки.
В технических устройствах используется большое число различных упругих элементов, но наиболее распространены следующие три типа элементов, выполненных как правило из металла:
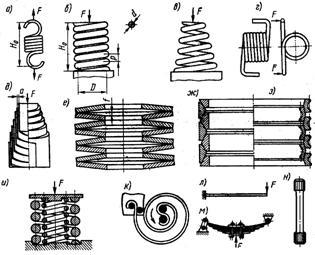
Пружины (рис. 16.1, а…м) – упругие элементы, предназначенные для создания (восприятия) сосредоточенной силовой нагрузки.
Торсионы (рис. 16.1, н) - упругие элементы, выполненные обычно в форме вала и предназначенные для создания (восприятия) сосредоточенной моментной нагрузки.
Мембраны - упругие элементы, предназначенные для создания (восприятия) распределенной по их поверхности силовой нагрузки (давления).
|
Рис. 17.1. Некоторые упругие элементы машин: винтовые пружины - а) растяжения, б) сжатия, в) коническая сжатия, г) кручения; д) телескопическая ленточная пружина сжатия; е) наборная тарельчатая пружина; ж, з) кольцевые пружины; и) составная пружина сжатия; к) спиральная пружина; л) пружина изгиба; м) рессора (наборная пружина изгиба); н) торсионный валик. |
1) создавать постоянно действующие усилия (моменты), необходимые для силового замыкания кинематических пар;
2) обеспечивать беззазорность в кинематических парах механизмов с целью повышения их кинематической точности;
3) предохранять механизмы от воздействия чрезмерных нагрузок при ударах и вибрациях;
4) накапливать энергию в процессе деформации под действием внешней нагрузки и отдавать ее для работы механизмов в процессе восстановления исходной формы;
5) Выполнять преобразование силы в перемещение при использовании в качестве чувствительных элементов приборов.
Классификация упругих элементов:
1) По виду создаваемой (воспринимаемой) нагрузки: силовые (пружины, амортизаторы, демпферы) - воспринимают сосредоточенную силу; моментные (моментные пружины, торсионы) – сосредоточенный крутящий момент (пару сил); воспринимающие распределенную нагрузку (мембраны давления, сильфоны, трубки Бурдона и т.п.).
2) По виду материала, использованного для изготовления упругого элемента: металлические (стальные, стальные нержавеющие, бронзовые, латунные пружины, торсионы, мембраны, сильфоны, трубки Бурдона) и неметаллические, изготовленные из резин и пластмасс (демпферы и амортизаторы, мембраны).
3) По виду основных напряжений, возникающих в материале упругого элемента в процессе его деформации: растяжения-сжатия (стержни, проволоки), кручения (винтовые пружины, торсионы), изгиба (пружины изгиба, рессоры).
4) В зависимости от взаимосвязи нагрузки, действующей на упругий элемент, с его деформацией: линейные (график нагрузка-деформация представляет прямую линию) и нелинейные (график нагрузка-деформация непрямолинеен).
5) В зависимости от формы и конструкции: пружины, цилиндрические винтовые, одно- и многожильные, конические винтовые, бочкообразные винтовые, тарельчатые, цилиндрические прорезные, спиральные (ленточные и круглые), плоские, рессоры (многослойные пружины изгиба), торсионы (пружинные валы), фигурные и т.п.
6) В зависимости от способа изготовления: витые, точеные, штампованные, наборные и т.п.
В машиностроении наибольшее распространение получили винтовые одножильные пружины, витые из проволоки – цилиндрические, конические и бочкообразные. Цилиндрические пружины имеют линейную характеристику (зависимость сила-деформация), две другие – нелинейную.
Выбор материала: Наибольшее количество пружин изготавливают из высокоуглеродистых и легированных сталей с содержанием углерода 0,5…1,1%. Модуль упругости пружинных сталей E = (2,1…2,2)×105 МПа, модуль сдвига G = (7,6…8,2)×104 МПа.
Для изготовления пружин, работающих в агрессивной среде, вызывающей коррозию углеродистых сталей применяют нержавеющие стали, или сплавы на основе меди. Модуль упругости сплавов на медной основе E = (1,2…1,3)×105 МПа, модуль сдвига G = (4,5…5,0)×104 МПа.
Проектный расчет таких пружин производится из условия прочности по напряжениям скручивания, поскольку все остальные виды напряжений составляют малую долю от скручивающих. Как известно, при кручении стержня напряжения в опасном сечении
![]() ;
(17.7)
;
(17.7)
где
Mкр
– крутящий момент, а
![]() –
полярный момент сопротивления сечения
витка пружины, навитой из проволоки
диаметромd.
Для учета неравномерности распределения
напряжения по сечению витка, обусловленного
кривизной его оси, в формулу (17.7) вводится
коэффициент k,
зависящий от индекса пружины
–
полярный момент сопротивления сечения
витка пружины, навитой из проволоки
диаметромd.
Для учета неравномерности распределения
напряжения по сечению витка, обусловленного
кривизной его оси, в формулу (17.7) вводится
коэффициент k,
зависящий от индекса пружины
![]() .
При обычных углах подъема витка, лежащих
в пределах 6…12° коэффициентk
с достаточной для расчетов точностью
можно вычислить по выражению
.
При обычных углах подъема витка, лежащих
в пределах 6…12° коэффициентk
с достаточной для расчетов точностью
можно вычислить по выражению
![]() .
(17.8)
.
(17.8)
Учитывая изложенное, зависимость (17.7) преобразуется к следующему виду
![]() .
(17.9)
.
(17.9)
Из последнего получаем
![]() или
или
![]() .
(17.10)
.
(17.10)
При известных геометрических параметрах цилиндрической винтовой пружины ее жесткость можно вычислить по формуле
![]() ;
(17.11)
;
(17.11)
а величину деформации (осадки) пружины
![]() .
(17.12)
.
(17.12)
При проектном расчете нестандартных пружин выражения (16.11) или (16.12) используют, как правило, для вычисления количества рабочих витков. Длина проволоки, необходимой для навивки пружины с заданными геометрическими параметрами, может быть определена по выражению
![]() .
(17.13)
.
(17.13)
Для углов подъема витка a = 6…9° последнее выражение может быть заменено более простым приближенным выражением, дающим результат с достаточной для практического применения точностью
![]()
Р3 – максимально допустимая сила деформации, D0 – средний диаметр навивки пружины, n1 – полное число витков.