

1.Определение ускорения точки а.
Так
как угловая скорость ![]() является постоянной, то
является постоянной, то ![]() .
.
![]() .
.
Вектор
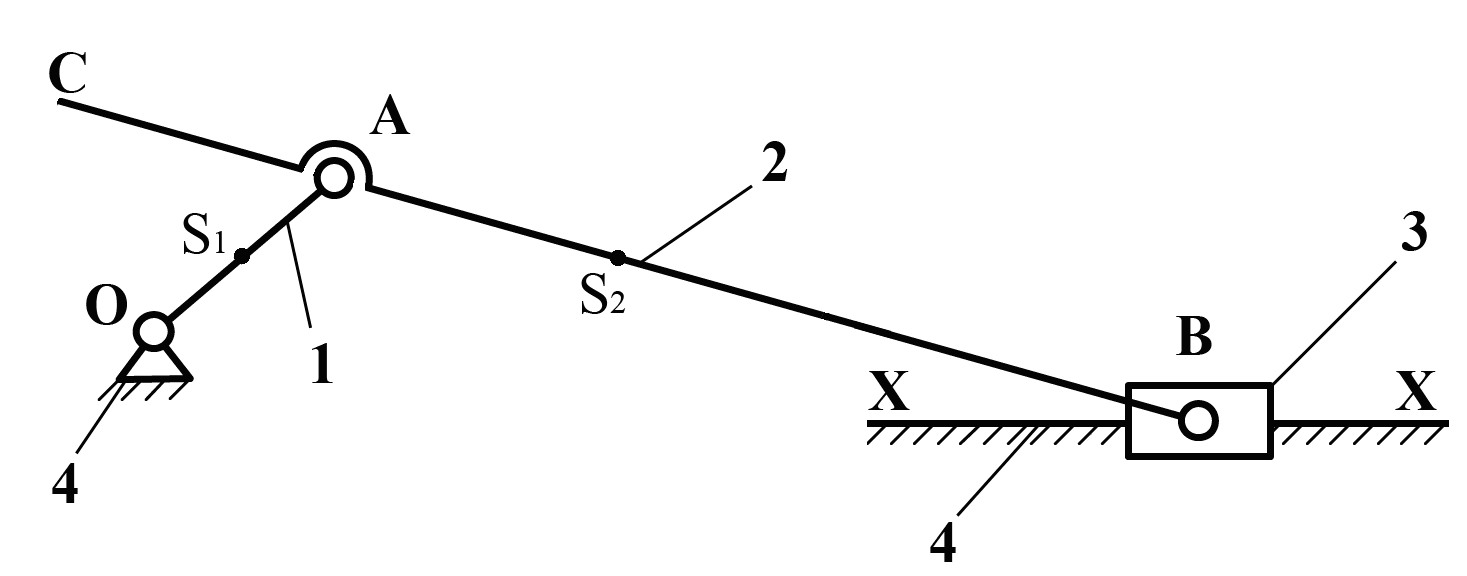
ускорения ![]() направлен параллельно кривошипу ОА
от точки А
к точке О.
направлен параллельно кривошипу ОА
от точки А
к точке О.
Выбираем
масштаб плана ускорений ![]() .
Найдём отрезок, изображающий вектор
ускорения
.
Найдём отрезок, изображающий вектор
ускорения ![]() на плане:
на плане: ![]() .
Из полюса плана ускорений
.
Из полюса плана ускорений ![]() откладываем данный отрезок в направлении,
параллельном АО.
откладываем данный отрезок в направлении,
параллельном АО.
План ускорений
2.Определение ускорения точки в.
Запишем
векторное уравнение: ![]() .
Уравнение решаем графически.
.
Уравнение решаем графически.
Вектор
относительного ускорения ![]() раскладываем на нормальную и касательную
составляющие:
раскладываем на нормальную и касательную
составляющие: ![]() .
.
Нормальное относительное ускорение равно:
![]()
![]() .
.
Найдём
отрезок, изображающий вектор ускорения
![]() на плане:
на плане: ![]()
![]()
Продолжаем
строить план ускорений, используя
правило сложения векторов. Вектор
ускорения ![]() направлен параллельно АВ.
Откладываем отрезок
направлен параллельно АВ.
Откладываем отрезок ![]() из точки
из точки ![]() плана ускорений в указанном направлении
от точки В
к точке А.
плана ускорений в указанном направлении
от точки В
к точке А.
Вектор
ускорения ![]() направлен перпендикулярно АВ.
Проводим это направление из точки
направлен перпендикулярно АВ.
Проводим это направление из точки ![]() плана ускорений. Вектор ускорения
плана ускорений. Вектор ускорения ![]() направлен параллельно оси x
– x.
Проводим это направление из полюса
направлен параллельно оси x
– x.
Проводим это направление из полюса ![]() .
Две прямые линии, проведённые из точек
.
Две прямые линии, проведённые из точек
![]() и
и ![]() в указанных направлениях, пересекаются
в точке
в указанных направлениях, пересекаются
в точке ![]() .
.
Найдем
величины ускорений. Измеряя длины
полученных отрезков и умножая их на
масштаб ![]() ,
получим:
,
получим:
![]()
![]()
![]()
3.Определение ускорения точки с.
Воспользуемся следствием из теоремы подобия. Составим пропорцию:
![]()
![]() мм.
мм.
Данный
отрезок откладываем на продолжении
отрезка ![]() .
Точку
.
Точку ![]() соединяем с полюсом
соединяем с полюсом ![]() .
.
Величина ускорения точки С:
![]()
![]()
4.Определение ускорения точки .
Воспользуемся следствием из теоремы подобия. Составим пропорцию:
![]() ,
,
![]() мм.
мм.
Данный
отрезок откладываем на прямой ![]() от
точки
от
точки ![]() .
Точку
.
Точку ![]() соединяем
с полюсом
соединяем
с полюсом ![]() .
.
Величина
ускорения: ![]()
5.Определение углового ускорения шатуна ав.
![]()
![]() .
Для определения направления
.
Для определения направления ![]() переносим вектор
переносим вектор ![]() в точку В
шатуна АВ
и смотрим как она движется относительно
точки А.
Направление этого движения соответствует
в точку В
шатуна АВ
и смотрим как она движется относительно
точки А.
Направление этого движения соответствует
![]() .
В данном случае угловое ускорение
.
В данном случае угловое ускорение ![]() направлено против часовой стрелки.
направлено против часовой стрелки.
|
Исследуемая величина |
Отрезок на плане |
Направление |
Величина
отрезка на плане, |
Масштабный коэффициент
|
Значение
величины, |
|
|
|
|
|
|
|
|
| |||||
|
|
|
|
| ||
|
| |||||
|
|
|
|
| ||
|
| |||||
|
|
|
|
| ||
|
| |||||
|
| |||||
|
|
|
|
| ||
|
| |||||
|
|
|
|
| ||
|
| |||||
|
|
|
|
| ||
|
|
|
| |||
Лекция 4
Краткое содержание
Силовой анализ механизмов. Основные задачи. Силы, действующие на звенья механизма. Реакции в кинематических парах. Принципы и последовательность силового расчёта. Типовые расчёты групп Ассура .