

3.Зубчатые механизмы (рис.1.3).
Зубчатые механизмы образуются зубчатыми колесами. Передача нагрузки и движение осуществляется за счет воздействия зубьев друг на друга.
Их используют в большинстве механизмов для передачи энергии от двигателя к ведущим валам.
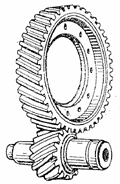
Рис.1.3
4.Фрикционные механизмы (рис.1.4).
Во фрикционных механизмах движение передается за счет сил трения, возникающих при контакте звеньев. Простейшая фрикционная передача (рис.1.4,а) состоит из двух цилиндрических катков 1 и 2 и стойки 3. Один каток прижимается к другому с помощью пружины. Используются в кинематических цепях приборов для обеспечения плавности движения, бесшумности и безударного включения. К фрикционным механизмам относятся и вариаторы (рис.1.3,б), которые обеспечивают плавное изменение угловой скорости ведомого звена 2 при равномерном вращении ведущего звена 1 и его перемещения вдоль оси.
а).
 б).
б).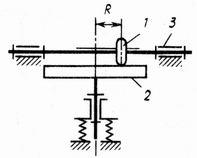
Рис.1.4
5.Гидравлические, пневматические механизмы (рис.1.5).
В этих механизмах для преобразования движения кроме твердых тел участвуют жидкие или газообразные тела. На рис.1.5 приведена схема гидравлического механизма, предназначенного для привода в движение поршня 1 с помощью распределителя 2. Жидкость в цилиндр 5 поступает из распределителя в результате поочередного включения электромагнитов 3 и 4. Гидравлическая схема включает в себя также насос 6, бак 7 и клапан 8. В пневматических механизмах насос заменяют источником сжатого воздуха.
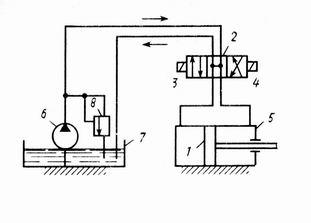
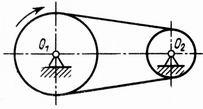
Рис.1.5 Рис.1.6
6.Механизмы с гибкими звеньями (рис.1.6).
Данные механизмы применяют для передачи вращательного движения на большие расстояния с преобразованием параметров вращения. Передача движения осуществляется за счет сил трения между шкивами 1, 2 и гибким звеном 3. В качестве гибких звеньев применяют ремни, канаты, цепи, нити.
7.Клиновые механизмы (рис.1.7).
Рис.1.7
Простейший клиновой механизм состоит из клиньев 2, 3 и стойки 1. Он служит для преобразования одного прямолинейного движения в другое. Эти механизмы применяются различного вида прессов, поглощающих аппаратов железнодорожных автосцепок, зажимов, механизмов подачи деталей и т.д..
Машинный агрегат – это совокупность взаимосвязанных механизмов.
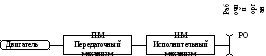
Рис.1.8 Блок-схема машинного агрегата
Звено
Звено - это одна или несколько деталей механизма, соединенных между собой жестко.
В каждом механизме имеется 2 группы звеньев.
1.Неподвижное звено - стойка. Стойка в механизме может быть только одна, так как все неподвижные звенья являются единым целым (например, корпус электродвигателя, станина станка) Условное обозначение (рис.1.9, звено 6).
2.Подвижные звенья:
ведущие звенья – это звенья, закон движения которых задан;
ведомые звенья - это звенья, закон движения которых определяется движением ведущих звеньев.
В рычажных механизмах имеются следующие подвижные звенья:
кривошип (рис.1.9, звено 1), совершает полный оборот относительно стойки 6;
коромысло (рис.1.9, звено 5), совершает неполный оборот относительно стойки 6;
ползун (рис.1.9, звено 2), совершает возвратно-поступательное движение;
кулиса (рис.1.9, звено 3), звено, которое совершает вращательное движение относительно стойки 6 и на котором есть направляющая для ползуна;
шатун (рис 1.9, звено 4) - звено, которое не имеет соединения со стойкой.
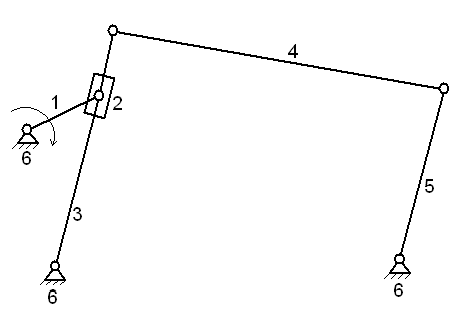
Рис. 1.9