

Основные формулы для определения скоростей и ускорений точек звеньев
Таблица 3.1
|
№ |
Вид движения |
Скорость |
Ускорение |
|
1 |
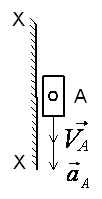
Поступательное (ползун по стойке)
|
Все
точки звена имеют одинаковую скорость
|
Все
точки звена имеют одинаковые ускорения
|
|
2 |
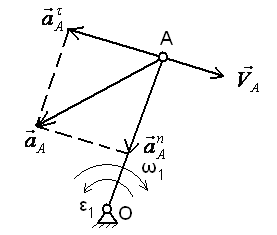
Вращательное вокруг неподвижной оси (кривошип или коромысло относительно стойки)
|
Скорость точки А
Вектор
|
Полное ускорение точки А
Нормальное
ускорение
Вектор
Касательное
ускорение
Вектор
|
|
3 |
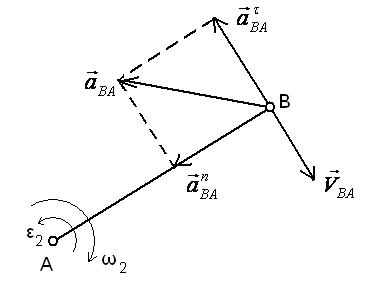
Звено совершает плоскопараллельное движение (шатун)
|
Скорость точки В
Относительная скорость
Вектор
|
Ускорение точки В
Относительное ускорение
Нормальное ускорение
Вектор
Касательное ускорение
Вектор
|
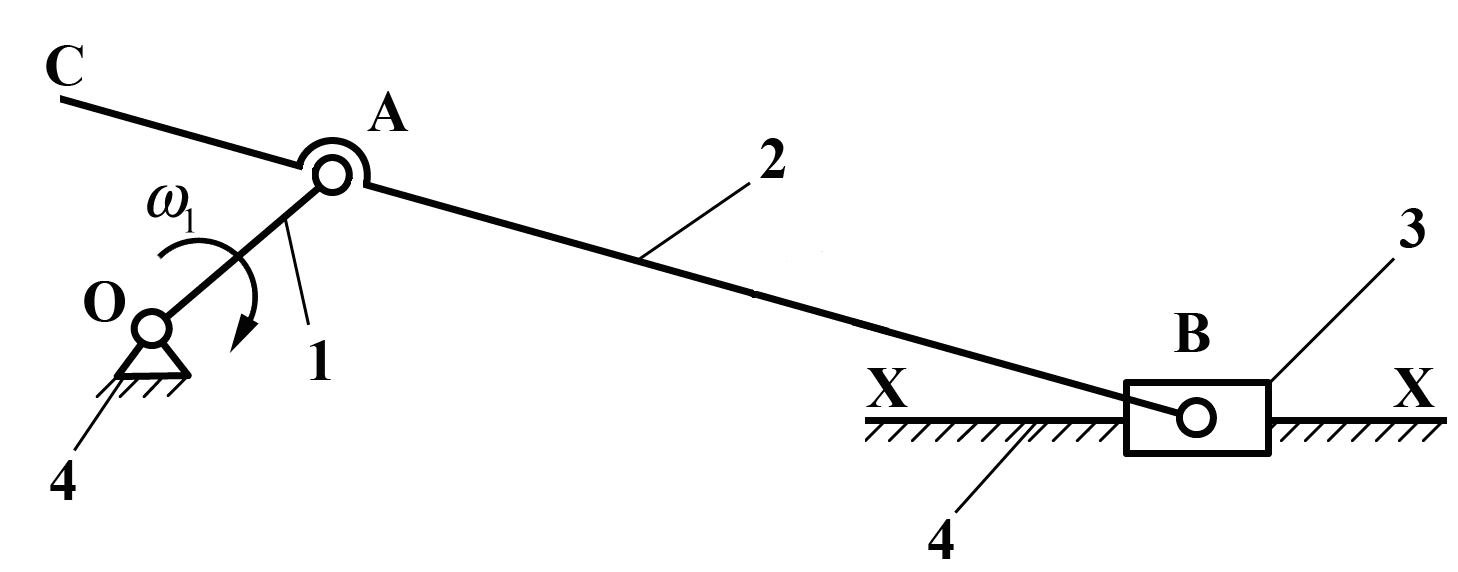
Пример 3.1
Кинематический расчёт кривошипно-ползунного механизма. Определение скоростей точек звеньев для заданного положения механизма.
Дано:
1.Угловая
скорость кривошипа является постоянной
и равна ![]() .
.
2.Размеры звеньев:
ОА = 20мм, АВ = 76мм, АС = 26мм.
План скоростей
1. Определение скорости точки А.
![]() .
.
Вектор
скорости ![]() перпендикулярен кривошипу ОА.
перпендикулярен кривошипу ОА.
Выбираем
масштаб плана скоростей![]() .
.
Найдём
отрезок, изображающий вектор скорости
![]() на плане:
на плане:
![]() .
.
Из
полюса плана скоростей ![]() откладываем
данный отрезок в направлении,
перпендикулярном ОА
в направлении угловой скорости
откладываем
данный отрезок в направлении,
перпендикулярном ОА
в направлении угловой скорости ![]() .
.
2. Определение скорости точки В.
Запишем векторное уравнение:
![]() .
Уравнение решаем графически.
.
Уравнение решаем графически.
Направления
векторов скоростей: ![]() ,
,
![]() .
.
Продолжим строить план скоростей, используя правило сложения векторов.
Из
конца вектора ![]() (точка
(точка ![]() )
проводим направление вектора
)
проводим направление вектора ![]() .
Из полюса (точка
.
Из полюса (точка ![]() )
проводим направление вектора
)
проводим направление вектора ![]() .
На пересечении двух проведённых
направлений получим точку
.
На пересечении двух проведённых
направлений получим точку ![]() .
Измеряя длины полученных отрезков и
умножая их на масштаб
.
Измеряя длины полученных отрезков и
умножая их на масштаб ![]() ,
получим значения скоростей:
,
получим значения скоростей:
![]()
![]()
3. Определение скорости точки С.
Воспользуемся следствием из теоремы подобия. Составим пропорцию:
![]()
![]() мм
мм
Данный
отрезок откладываем на продолжении
отрезка ![]() от точки а.
Точку
от точки а.
Точку ![]() соединяем с полюсом
соединяем с полюсом ![]() .
.
Величина скорости точки С:
![]()
![]()
4. Определение угловой скорости шатуна АВ.
![]() с-1
с-1
Для
определения направления ![]() переносим вектор
переносим вектор ![]() в точку В
шатуна АВ
и смотрим как она движется относительно
точки А.
Направление этого движения соответствует
в точку В
шатуна АВ
и смотрим как она движется относительно
точки А.
Направление этого движения соответствует
![]() .
В данном случае угловая скорость
.
В данном случае угловая скорость ![]() направлена против часовой стрелки.
направлена против часовой стрелки.
|
Исследуемая величина |
Отрезок на плане |
Направление |
Величина отрезка на плане, мм |
Масштабный коэффициент μv |
Значение величины, м/с
|
|
|
|
|
|
|
|
|
| |||||
|
|
|
|
| ||
|
| |||||
|
|
|
|
| ||
|
| |||||
|
| |||||
|
|
|
|
| ||
|
|
|
| |||
Пример 3.2
Кинематический расчёт кривошипно-ползунного механизма. Определение ускорений точек звеньев для заданного положения механизма.
Дано:
1.Угловая
скорость кривошипа является постоянной
и равна ![]() ,
,
![]() .
.
2.Размеры звеньев: ОА = 20мм, АВ = 76мм, АС = 26мм, AS2 = 25 мм.
Решение: