

Метод стробирования
Сущность способа регистрации стробированием состоит в том, что накопительный элемент наборного устройства приемника подключается на время, которое значительно меньше длительности элементарной посылки. Момент подключения накопительного элемента к входному устройству часто называют моментом регистрации или временем регистрации. Очевидно, что момент регистрации посылки должен совпадать с приходом из канала связи наиболее устойчивой части посылки. При наличие краевых искажений наиболее вероятным является искажение краев посылок, поэтому наиболее устойчива средняя часть посылки. Именно в момент средней части посылки ее целесообразно регистрировать.
При регистрации методом стробирования вид принимаемого элемента («0» или «1») определяется на основании анализа знака импульса постоянного тока (сигнала на выходе КПТ) в середине единичного интервала. Любое смещение момента регистрации относительно середины единичного интервала приводит к увеличению вероятности неправильной регистрации сигнала. Регистрация методом стробирования может быть реализована наэлектронных элементах.Структурная схема устройства, осуществляющего регистрацию посылок методом стробирования, приведена на рисунке 1.3, а временные диаграммы поясняющие принцип работы - на рисунке 1.4.
Стробимпульс
Передается последовательность 10101. На выходе входного устройства Вх.У импульсы постоянного тока имеют прямоугольную форму, но искажены по длительности (штриховой линией показаны неискаженные сигналы). Ключи Кл.1 и Кл.2 открываются одновременно на время поступления стробимпульса. Поступление импульса U5 в моменты, соответствующие серединам единичных интервалов, обеспечивается применением устройств поэлементной синхронизации. При этом сигнал U4 (U5) появляется или на выходе Кл.1 (точка 4), или Кл.2 (точка 5). В зависимости от этого выходное устройство Вых.У. фиксирует «1» или «0». Если смещение ЗМ относительно идеального положения не превышает 0.5 0, то элемент сигнала регистрируется правильно. Величина, на которую допускается смещение ЗМ, не вызывающее неправильный прием, определяет исправляющую способность приемника. В нашем случае исправляющая способность (теоретическая) равна 0.5 0 или 50%. На рис.1.4 видно, что из-за смещения ЗМ относительно идеального положения на величину, превышающую 0.5 0, 5 элемент принимается неправильно.
Интегральный метод:

Сущность интегрального метода регистрации состоит в том, что во время приема нанакопительном элементе происходит накопление энергии посылки в течение времени длительности неискаженной посылки то и решение в виде принятого элемента выносится на основе анализа сигнала Uвых, определяемого выражением:

где Uвх(t) - сигнал на входе регистрирующего устройства. Этот сигнал является дискретной функции непрерывного времени.
Интегрирование осуществляется на интервале, соответствующем неискаженному элементу. Пусть Uвх(t) принимается на интервале анализа как значения Uвх(t)=0, так и Uвх(t)=1. Тогда решения о приеме «1» должно выноситься, если Uвых0.5. Очевидно, что ошибка при передаче «1» будет в том случае, когда Uвых<0.5.
Интегральный метод часто реализуется на основе многократного стробирования сигнала Uвх(t) в N точках. Схема, поясняющая принцип действия такого устройства регистрации, а также диаграммы, поясняющие принцип регистрации интегральным методом приведены соответственно на рис.1.5 и рис.1.6.


Сигнал U1(t) (точка 1) управляет ключом Кл.
При
открытом ключе, когда
![]() ,
тактовые импульсы
,
тактовые импульсы![]() (стробипульсы)
проходят на счетчик Сч. За время действия
неискаженной тактовой посылки
(стробипульсы)
проходят на счетчик Сч. За время действия
неискаженной тактовой посылки![]() (на интервале
(на интервале![]() )
на выходе Кл (точка 3) появляетсяN
тактовых импульсов. Если на выходе Кл
на единичном интервале появится N/2+1
и более стробимпульсов, то можно сделать
вывод что принята «1». Емкость счетчика
достаточно взять равной N/2+1.
В конце единичного интервала, определяемого
с помощью устройства по элементной
синхронизации, показания счетчика
считываются, он обнуляется. На данных
временных диаграммах не правильно
принимается вторая посылка.
)
на выходе Кл (точка 3) появляетсяN
тактовых импульсов. Если на выходе Кл
на единичном интервале появится N/2+1
и более стробимпульсов, то можно сделать
вывод что принята «1». Емкость счетчика
достаточно взять равной N/2+1.
В конце единичного интервала, определяемого
с помощью устройства по элементной
синхронизации, показания счетчика
считываются, он обнуляется. На данных
временных диаграммах не правильно
принимается вторая посылка.
Сущность комбинированного способа регистрации состоит в том, что приходящую посылку стробируют в нескольких точках, например в трех. Если в двух или в трех точках регистрации зафиксирован знак «1», то и выходное устройство перейдет в состояние «1». Нетрудно заметить, что при стробировании только в центре посылки комбинированный способ регистрации переходит в регистрацию стробированием и при очень большом количестве проб в интервале длительности посылки - в интегральный способ регистрации.
Сравним помехоустойчивость методом стробирования и интегрального при действии краевых искажений. Поскольку при регистрации методом стробирования посылка регистрируется в середине, то допускается смещение любого из ЗМ на величину, не превышающую 0.50. При регистрации интегральным методом суммарное смещение границ не должно превышать 0.50. Очевидно, что последнее условие выполняется с меньшей вероятностью, то есть Р(и)ош.к>Р(с)ош.к, где Р(и)ош.к, Р(с)ош.к - соответственно вероятности неправильного приема при краевых искажениях и регистрации интегральным методом и методом стробирования.
Рассмотрим действия дроблений. Будем считать, что на единичный интервал приходится только одно дробление. Обозначим длительность дробления tдр. Очевидно, что все дробления могут быть подразделены на две группы tдр0/2 и tдр<0/2. Если tдр<0/2, то при интегральном методе прием будет правильным, так как искажается менее половины ИПТ. Если tдр0/2 и при этом искажено более половины ИПТ, то при интегральном методе регистрации будет неправильный прием. Однако поскольку искажено более половины посылки, то будет искажена и ее середина. Следовательно, будет неправильный прием и при регистрации методом стробирования. Таким образом, если при регистрации методом стробирования неправильный прием возможен как в случае, если tдр<0/2, так и при tдр>0/2, то при интегральном - только при tдр0/2. Поэтому Р(и)ош.д<Р(с)ош.д, где Р(и)ош.д, Р(с)ош.д -соответственно вероятности ошибки при действии дроблений для случаев регистрации интегральным методом и методом стробирования. Вероятность ошибки будет тем больше, чем чаще появляется дробления, а также чем больше средняя длительность дробления и дисперсия длительности дробления.
П.1.2 Вывод формулы для вычисления вероятности ошибки при
регистрации
методом стробирования, и вычисление
вероятности ошибки для заданных
![]() .
.
В ыводы
формул производятся при условии, что>a
ыводы
формул производятся при условии, что>a
Рис.1.7.К определению влияния поэлементной синхронизации на достоверность приема элемента.([1],с.358).
Элемент
сигнала регистрируется не правильно в
том случае, если левая или правая граница
сместится вовнутрь посылки на величину,
превышающую исправляющую способность
приемника. Вероятность этих событий
обозначим соответственно
![]() .
Неправильная регистрация так же имеет
место в том случае, если обе границы
одновременно сместятся на величину,
большую
.
Неправильная регистрация так же имеет
место в том случае, если обе границы
одновременно сместятся на величину,
большую
![]() .
Вероятность этого события в предположении
независимости смещения границ элементов
определим как
.
Вероятность этого события в предположении
независимости смещения границ элементов
определим как![]() .
Очевидно,
.
Очевидно,
что
![]()
![]()
Произведем
замену переменной
![]() ,
и
,
и![]() .
В нашем случае
.
В нашем случае![]() ,
тогда:
,
тогда:
Пределы
интегрирования после замены переменных
:
![]()
Следовательно: .
.

где
 - функция Крампа;
- функция Крампа;
![]() .
.
Аналогично
получаем для
![]() :
:![]() .
.
Задача 1. Вычислить вероятности ошибки для заданных =48%, =15% иа =20:
Решение:
Вероятность ошибки при действии краевых искажений и регистрации методом стробирования определяется по формуле:
![]()
Т.к. в нашем случае Р1=Р2 получаем:
![]()
Из таблицы значений функций Крампа [Приложение 1] имеем:
![]()
![]()
Ответ:![]()
Глава №2: Синхронизация в системах ПДС.
Синхронизация - процесс установления и поддержания определенных временных соотношений между двумя и более процессами.

Рис 2.1. Классификация систем синхронизации.
Различают поэлементную, групповую и цикловую синхронизацию.
В соответствии с ГОСТ 17657-79 поэлементная синхронизация, групповая и цикловая синхронизации – это синхронизация переданного и принятого цифровых сигналов данных, при которой устанавливаются и поддерживаются требуемые фазовые соотношения между значащими моментами преданных и принятых соответственно единичных элементов сигналов, групп единичных элементов этих сигналов и циклов их временного объединения. Поэлементная синхронизация позволяет на приеме правильно отделить один элемент от другого и обеспечить наилучшие условия для его регистрации. Групповая синхронизация обеспечивает правильное разделение принятой последовательности на кодовые комбинации, а цикловая синхронизация обеспечивает правильное разделение циклов временного объединения элементов на приеме. Обычно задачи цикловой и групповой решаются одними и теми же методами.
К системам синхронизации предъявляются следующие требования:
Высокая точность синхронизации
Малое время вхождения в синхронизм, как при включении оборудования, так и после перерыва связи
Сохранение синхронизации при действии помех и кратковременных перерывах связи
Независимость точности синхронизации от статистической структуры, передаваемой последовательности.
Поэлементная синхронизация может быть обеспечена за счет использования автономного источника – хранителя эталона времени и методов принудительной синхронизации. Первый способ применяется лишь тех случаях, когда время сеанса связи, включая время вхождения в связь, не превышает время сохранения синхронизации. В качестве автономного источника можно использовать местный генератор с высокой стабильностью.
Методы принудительной синхронизации могут быть реализованы на использовании отдельного канала (по которому передаются импульсы, необходимые для подстройки местного генератора) или рабочей (информационной) последовательности. Использование второго метода требует снижения пропускной способности канала за счет выделения дополнительного синхроканала. Поэтому на практике чаще всего используют второй метод.
По способу формирования тактовых импульсов различают разомкнутые устройства поэлементной синхронизации (без обратной связи) и замкнутые системы (с обратной связью).
Поэлементная синхронизация с добавление и вычитанием импульсов (принцип действия).
В системах синхронизации без непосредственного воздействия на генератор фаза подстраивается в промежуточном преобразователе ПП, через который проходит местное тактовое колебание (генерируемая последовательность тактовых импульсов). В качестве ПП чаще всего используется делитель частоты следования импульсов. Устройства синхронизации с делителем частоты возможно реализовать целиком на дискретных элементах, что упрощает их изготовление, настройку и эксплуатацию. Часто такие устройства называют устройствами с дискретным управлением (или дискретными устройствами синхронизации). Принцип изменения фазы в процессе деления частоты можно пояснить, пользуясь (рис.2.2).
Устройство без непосредственного воздействия на генератор с добавлением и вычитанием импульсов на входе частоты относится к трехпозиционным (Рис.2.2.):

Здесь возможны три случая: импульсы от генератора без изменения проходят на вход делителя частоты ДЧ; к последовательности импульсов, поступающих от генератора добавляется один импульс; то же, исключается один импульс. Процесс изменения фазы тактовых импульсов можно пояснить с помощью следующего рисунка:
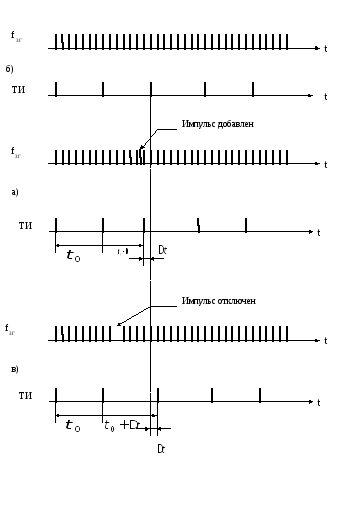
где а) – нормальный процесс деления, б) – добавление импульса, в) – исключение импульса.
Генератор
вырабатывает колебания частотой fЗГ
в 2kД
раз больше тактовой частоты (так как
коэффициенты деления делителей на
рисунке соответственно равны 2 и kД).
Фазовый дискриминатор, в состав которого
входит формирователь фронтов ФФ,
определяет величину расхождения по
фазе ЗМ и ТИ генератора. Если частота
генератора приемника больше частоты
генератора передатчика (приемник
«спешит»), то на выходе схемы И1 появится
управляющий сигнал, который, пройдя
реверсивный счетчик (усредняющее
устройство), запретит прохождение одного
импульса от ЗГ, в результате чего тактовая
последовательность на выходе делителя
сдвинется в сторону отставания на
![]() .
Исключение такта (запрет) происходит с
помощью схемы запрета НЕТ. Если приемник
«отстает», то сигнал управления появится
на выходе И2, что приводит к появлению
дополнительного импульса на выходе
схемы ИЛИ. В результате тактовая
последовательность на выходе делителя
сдвинется в сторону опережения на
.
Исключение такта (запрет) происходит с
помощью схемы запрета НЕТ. Если приемник
«отстает», то сигнал управления появится
на выходе И2, что приводит к появлению
дополнительного импульса на выходе
схемы ИЛИ. В результате тактовая
последовательность на выходе делителя
сдвинется в сторону опережения на![]() .
При пропадании входного сигнала положение
тактовой последовательности на выходе
делителя обусловлено лишь значением
коэффициента деления и стабильностью
ЗГ.
.
При пропадании входного сигнала положение
тактовой последовательности на выходе
делителя обусловлено лишь значением
коэффициента деления и стабильностью
ЗГ.
Выше рассматривалось ситуация, когда опережение или отставание ТИ выявлялось при отсутствии краевых искажений. В реальных условиях ЗМ принимаемых информационных информационных сигналов искажены. Эти искажения приводят к тому, что устройство синхронизации может произвести ложную подстройку частоты, что приведет к снижению точности синхронизации. Влияние этих искажений можно уменьшить, включив между ФД и УУ усредняющее устройство (инерционный элемент или интегратор). Обычно используют реверсивный счетчик РС.
Параметры системы синхронизации с добавлением и вычитанием импульсов.
Рассмотрим основные параметры устройств синхронизации замкнутого типа. Наиболее частое практическое применение нашел способ поэлементной синхронизации без непосредственного воздействия на задающий генератор синхроимпульсов. К основным параметрам, характеризующим устройство такого типа, относятся:
1.
Шаг
коррекции (![]() )-
смещение
фазы ТИ в долях единичного интервала
(0)
на выходе делителя
частоты (ДЧ) при добавлении или вычитании
одного корректирующего импульса.
)-
смещение
фазы ТИ в долях единичного интервала
(0)
на выходе делителя
частоты (ДЧ) при добавлении или вычитании
одного корректирующего импульса.

На выходе ДЧ
После
добавленыя
одного импульса
Рис.2.3. К определению шага коррекции.
![]() ,
где
п
- коэффициент
деления делителя частоты.
,
где
п
- коэффициент
деления делителя частоты.
Рассмотрим основные параметры устройств синхронизации замкнутого типа. Наиболее частое практическое применение нашел способ поэлементной синхронизации без непосредственного воздействия на задающий генератор синхроимпульсов. К основным параметрам, характеризующим устройство такого типа, относятся:
Погрешность
синхронизации
![]() - величина, выраженная в долях единичного
интервала и равная наибольшему отклонению
синхросигналов от оптимального
(идеального) положения, которое с заданной
вероятностью может произойти при работе
устройства.
- величина, выраженная в долях единичного
интервала и равная наибольшему отклонению
синхросигналов от оптимального
(идеального) положения, которое с заданной
вероятностью может произойти при работе
устройства.
Погрешность синхронизации рассматривается как сумма двух погрешностей - статической и динамической:
![]()
Статическая погрешность ст – выраженное в долях единичного элемента 0 фазовое отклонение ТИ при приеме неискаженной информационной последовательности элементов. Величина ст определяется параметрами СС:
![]() ,
где к
– шаг
коррекции;
,
где к
– шаг
коррекции;
к – относительное смещение фазы тактовых сигналов из-за нестабильности генераторов передачи и приема за время между сигналами управления. Очевидно, что при передаче комбинации 1:1 промежуток времени между сигналами управления составил t=0•S, что соответствует tmin. При передаче единичных элементов одного и того же знака промежуток времени между сигналами управления бесконечен. Выражение для ст можно представить в виде: ст=1/m+6кS
Динамическая погрешность дин – выраженное в долях единичного элемента 0 фазовое смещение ТИ, вызванное искажениями элементов информационного сигнала (смещениями ЗМ). Искажения длительности принимаемых элементов могут вызвать появления ложных сигналов управления на выходе ФД, а, следовательно, и на выходе инерционного элемента. Эти сигналы могут осуществить ложное корректирование СС в сторону рассогласования фаз. При нормальном распределении смещений ЗМ входящей последовательности со средним значением, равным нулю, и среднеквадратическим отклонением 0 случайная величина дин. Также распределена по нормальному закону с дисперсией:

Время
синхронизации
![]() - время,
необходимое для корректирования
первоначального отклонения синхроимпульсов
относительно границ принимаемых
элементов.Первоначальное расхождение
фаз случайно и может быть лежать в
пределах от 0 до ±П (от 0 до ±0/2).
Рассмотрим граничный случай, когда
максимален и равен 0/2.
При приеме информационной последовательности
типа 1:1 и y=1:
tcmax=Sm0/2.
При приеме текста (у=0.5)
время синхронизации: tcmax=Sm0.
- время,
необходимое для корректирования
первоначального отклонения синхроимпульсов
относительно границ принимаемых
элементов.Первоначальное расхождение
фаз случайно и может быть лежать в
пределах от 0 до ±П (от 0 до ±0/2).
Рассмотрим граничный случай, когда
максимален и равен 0/2.
При приеме информационной последовательности
типа 1:1 и y=1:
tcmax=Sm0/2.
При приеме текста (у=0.5)
время синхронизации: tcmax=Sm0.
Время
поддержки сихронизма![]() - время, в
течение которого отклонение синхроимпульсов
от границ единичных элементов не выйдет
за допустимые предел рассогласования
(
- время, в
течение которого отклонение синхроимпульсов
от границ единичных элементов не выйдет
за допустимые предел рассогласования
(![]() )
при прекращении работы устройства
синхронизации при подстройке фазы.
.
)
при прекращении работы устройства
синхронизации при подстройке фазы.
.
Подстройка может прекратиться по причине обрыва канала связи или резкого ухудшения его качества, а также в случае долговременного поступления на вход приемника информационных элементов одного и того же знака. Следовательно, время tп.c определяет допустимое время обрыва в канале связи, при котором ранее установленная синфазность сохраняется. Время tп.c может быть определено по формуле:
tп.c=доп /2кВ.
Величина доп определяется исправляющей способностью приемника (способностью приемника правильно регистрировать единичные элементы при наличии искажений). Тогда:
tп.c=/2кВ.
Увеличение tп.c при заданной скорости модуляции может быть достигнуто уменьшением коэффициента нестабильности задающих генераторов (т.к. величина определяется схемой аппаратуры ПДИ и способом регистрации элементов и заранее известна).
Вероятность
срыва синхронизма
![]() - вероятность
того, что из-за действия помех отклонение
синхроимпульсов от границ единичных
элементов превысит половину единичного
интервала.
Подобный
переход фазы ТИ в соседний элемент
полностью нарушает работу синхронной
системы связи, т.к. распределители
передачи и приема «разойдутся» на
элемент, что приведет к нарушению
фазирования по циклам. Уменьшить величину
Рсс
можно увеличением времени усреднения
сигналов, поступающих с ФД, т.е. увеличением
емкости реверсивного счетчика S.
Это в свою очередь приводит к увеличению
времени синхронизации tc
и снижению периода корректирования.
Поэтому задача снижения
Рсс
и выбора периода усреднения (емкости
S)
является вариационной. В результате ее
решения необходимо определить оптимальную
характеристику того параметра, который
наиболее важен в данных условиях.
- вероятность
того, что из-за действия помех отклонение
синхроимпульсов от границ единичных
элементов превысит половину единичного
интервала.
Подобный
переход фазы ТИ в соседний элемент
полностью нарушает работу синхронной
системы связи, т.к. распределители
передачи и приема «разойдутся» на
элемент, что приведет к нарушению
фазирования по циклам. Уменьшить величину
Рсс
можно увеличением времени усреднения
сигналов, поступающих с ФД, т.е. увеличением
емкости реверсивного счетчика S.
Это в свою очередь приводит к увеличению
времени синхронизации tc
и снижению периода корректирования.
Поэтому задача снижения
Рсс
и выбора периода усреднения (емкости
S)
является вариационной. В результате ее
решения необходимо определить оптимальную
характеристику того параметра, который
наиболее важен в данных условиях.
Погрешность синхронизации целесообразно рассматривать как сумму двух погрешностей:
статической
погрешности синхронизации
![]() ,
определяемой нестабильностью задающего
генератора и шагом коррекции;
,
определяемой нестабильностью задающего
генератора и шагом коррекции;
динамической
погрешностью
![]() ,
вызываемой краевыми искажениями
единичных элементов :
,
вызываемой краевыми искажениями
единичных элементов :![]() .
.
В свою очередь, статическая погрешность складывается из двух составляющих: погрешности, обусловленной дискретным шагом синхронизации, и погрешности, обусловленной смещением тактового импульса за время между двумя подстройками:
![]() ,
где
,
где
![]() - шаг коррекции, т.е. смещение фазы
тактовых импульсов в долях единичного
интервала (
- шаг коррекции, т.е. смещение фазы
тактовых импульсов в долях единичного
интервала (![]() )
на выходе делителя частоты при добавлении
или вычитании одного корректирующего
импульса;
)
на выходе делителя частоты при добавлении
или вычитании одного корректирующего
импульса;![]() - коэффициент деления делителя;
- коэффициент деления делителя;![]() - суммарный коэффициент нестабильности
задающих генераторов передатчика и
приемника;S
– емкость реверсивного счетчика;
- суммарный коэффициент нестабильности
задающих генераторов передатчика и
приемника;S
– емкость реверсивного счетчика;
![]() - среднее число принимаемых подряд
элементов одного знака, определяющее
период корректирования
- среднее число принимаемых подряд
элементов одного знака, определяющее
период корректирования![]() .
.
Промежуток времени между сигналами управления является случайной величиной и зависит от числа значащих моментов в принимаемой последовательности. Число ЗМ определятся статической структурой сообщения.
Минимальный
период корректирования
![]() - это минимальное время между двумя
подстройками, зависящее как от емкости
реверсивного счетчика S,
так и от длительности единичного элемента
- это минимальное время между двумя
подстройками, зависящее как от емкости
реверсивного счетчика S,
так и от длительности единичного элемента
![]() .
ПриS=1,
т.е. когда отсутствует реверсивный
счетчик, корректирование происходит
при приеме ЗМ информационной
последовательности, т.е.
.
ПриS=1,
т.е. когда отсутствует реверсивный
счетчик, корректирование происходит
при приеме ЗМ информационной
последовательности, т.е.
![]() .
В общем случае
.
В общем случае![]() .
.
Динамическая
погрешность синхронизации
![]() представляет собой случайную величину
и подчиняется гауссовскому с плотностью
вероятности
представляет собой случайную величину
и подчиняется гауссовскому с плотностью
вероятности
![]()
Среднеквадратическое
значение
![]() можно рассчитать по следующей формуле:
можно рассчитать по следующей формуле:
 ,
,
где
![]() - среднеквадратическое значение краевых
искажений единичных элементов.
- среднеквадратическое значение краевых
искажений единичных элементов.
С
вероятностью, близкой к единице, можно
утверждать что случайная величина
![]() не будет превышать своего утроенного
среднеквадратического значения
(известное правило «3-х сигм»). Следовательно,
для оценки значения
не будет превышать своего утроенного
среднеквадратического значения
(известное правило «3-х сигм»). Следовательно,
для оценки значения![]() можно воспользоваться выражением
можно воспользоваться выражением
 .
.
Таким образом общее выражение для оценки погрешности синхронизации имеет вид:
 .
.
Время
вхождения в синхронизм
![]() будет зависеть от первоначального
расхождения по фазе тактовой
последовательности, вырабатываемой на
приеме, и принимаемой последовательности
ЗМ. Расхождение по фазе случайно и лежит
в пределах от 0 до
будет зависеть от первоначального
расхождения по фазе тактовой
последовательности, вырабатываемой на
приеме, и принимаемой последовательности
ЗМ. Расхождение по фазе случайно и лежит
в пределах от 0 до![]() .
В случае, когда отклонение по фазе
максимально и ТИ сдвинут относительно
идеального положения на
.
В случае, когда отклонение по фазе
максимально и ТИ сдвинут относительно
идеального положения на![]() .
Подстройка производится шагами, при
каждом шаге тактовые импульсы смещаются
на время
.
Подстройка производится шагами, при
каждом шаге тактовые импульсы смещаются
на время![]() .
Тогда число шагов, необходимое для
подстройки, будет равно
.
Тогда число шагов, необходимое для
подстройки, будет равно![]() .
Если подстройка осуществляется через
интервалы времени
.
Если подстройка осуществляется через
интервалы времени![]() ,
то время, необходимое для вхождения в
синхронизм, будет равно
,
то время, необходимое для вхождения в
синхронизм, будет равно![]() .
Учитывая увеличение интервала между
подстройками за счет реверсивного
счетчика, получим окончательно:
.
Учитывая увеличение интервала между
подстройками за счет реверсивного
счетчика, получим окончательно:
![]() ,
,
где
![]() ,
,![]() .
.
Время
поддержания синфазности
![]() - время, в течение которого фаза
синхроимпульсов не выйдет за допустимы
пределы при прекращении работы устройства
синхронизации, определяется формулой:
- время, в течение которого фаза
синхроимпульсов не выйдет за допустимы
пределы при прекращении работы устройства
синхронизации, определяется формулой:
![]() .
.
В
качестве
![]() обычно используют величину теоретической
исправляющей способности приемника
обычно используют величину теоретической
исправляющей способности приемника![]() ,
уменьшенную на величину на величину
погрешности синхронизации, т.е.
,
уменьшенную на величину на величину
погрешности синхронизации, т.е.![]() .
Тогда
.
Тогда
![]() .
.
Поскольку
величина теоретической исправляющей
способности приемника
![]() определяется способом регистрации и
заранее известна, то увеличение
определяется способом регистрации и
заранее известна, то увеличение![]() при заданной скорости модуляции В может
быть достигнуто лишь уменьшением
коэффициента не стабильности задающих
генераторов.
при заданной скорости модуляции В может
быть достигнуто лишь уменьшением
коэффициента не стабильности задающих
генераторов.
Вероятность
срыва синхронизации по элементам
![]() - это вероятность того, что фаза
синхроимпульсов под действием помех
сместится на величину, большую
- это вероятность того, что фаза
синхроимпульсов под действием помех
сместится на величину, большую![]() .
Такой сдвиг фазы нарушает работу
устройств синхронизации и приводит к
сбою групповой синхронизации. Уменьшить
величину
.
Такой сдвиг фазы нарушает работу
устройств синхронизации и приводит к
сбою групповой синхронизации. Уменьшить
величину![]() можно путем увеличения времени усреднения
сигналов корректирования, т.е. уменьшения
емкости реверсивного счетчикаS.
Однако время синхронизации будет также
расти пропорционально S,
а период корректирования уменьшаться.
Следовательно нужно решать другую
оптимизационную задачу – выбора
параметров с учетом конкретных условий
передачи для обеспечения минимума.
можно путем увеличения времени усреднения
сигналов корректирования, т.е. уменьшения
емкости реверсивного счетчикаS.
Однако время синхронизации будет также
расти пропорционально S,
а период корректирования уменьшаться.
Следовательно нужно решать другую
оптимизационную задачу – выбора
параметров с учетом конкретных условий
передачи для обеспечения минимума.
При
проектировании и расчете устройств
синхронизации обычно задаются следующие
параметры: погрешность синхронизации
![]() ;
скорость передачи В; среднеквадратическое
значение краевых искажений
;
скорость передачи В; среднеквадратическое
значение краевых искажений![]() ;
исправляющая способность приемника
;
исправляющая способность приемника![]() ;
время синхронизации
;
время синхронизации![]() ;
время поддержания синхронизма
;
время поддержания синхронизма![]() .
На основании заданных параметров
рассчитываются: частота задающего
генератора
.
На основании заданных параметров
рассчитываются: частота задающего
генератора![]() ;
допустимый коэффициент нестабильности
генератора
;
допустимый коэффициент нестабильности
генератора![]() ;
емкость реверсивного счетчикаS;
коэффициент деления делителя
;
емкость реверсивного счетчикаS;
коэффициент деления делителя
![]() .
.
S
и
![]() определяются по формулам:
определяются по формулам:
 ;
;
![]() .
.
При
этом частота задающего генератора
![]() .
.
Расчет параметров системы синхронизации с добавлением и вычитанием импульсов.
Задача 1. Коэффициент нестабильности задающего генератора устройства синхронизации и передатчика К = 10-4. Исправляющая способность приемника = 42%. Краевые искажения отсутствуют. Постройте зависимость времени нормальной работы (без ошибок) приемника от скорости телеграфирования после выхода из строя фазового детектора устройства синхронизации. Будут ли возникать ошибки, спустя минуту после отказа фазового детектора, если скорость телеграфирования В=9600 Бод?
Исходные данные:
К=10-4
=42%
В = 9600 Бод
Найти
![]()
Решение:
Рассматривается устройство синхронизации без непосредственного воздействия на частоту генератора.
При выходе из строя фазового детектора (ФД) перестает осуществляться подстройка фазы. Некоторое время после этого система еще работает без ошибок, а потом синхронизм нарушается, система перестает работать. В данной задаче требуется определить это время, т.е. время поддержания синхронизма tnc для разных значений скорости телеграфирования В и построить график зависимости tпс=f[B
Расчеты будем производить по формуле[1,стр.354]:
![]() ,при
чем
,при
чем
![]() ,
где
,
где![]() ,
т.к. по условию краевые искажения
отсутствуют; предположим, что задающий
генератор идеальное устройство
синхронизации, тогда
,
т.к. по условию краевые искажения
отсутствуют; предположим, что задающий
генератор идеальное устройство
синхронизации, тогда![]() ,
а сумма этих двух составляющих и есть
,
а сумма этих двух составляющих и есть![]() - как было изложено выше, характеризует
собой наибольшее отклонение синхросигналов
от оптимального (идеального) положения,
которое с заданной вероятностью может
произойти при работе устройства.
Следовательно, наша формула для расчетов
примет вид:
- как было изложено выше, характеризует
собой наибольшее отклонение синхросигналов
от оптимального (идеального) положения,
которое с заданной вероятностью может
произойти при работе устройства.
Следовательно, наша формула для расчетов
примет вид:
![]() .
.
Таким образом, получим:
![]()
Т.к.
tпс=0,22
с<1мин , то спустя минуту при скорости
модуляции В=9600 будут возникать ошибки,
ведь
![]() - характеризует собой время, в течение
которого фаза синхроимпульсов не выйдет
за допустимые пределы при прекращении
работы устройства синхронизации.
- характеризует собой время, в течение
которого фаза синхроимпульсов не выйдет
за допустимые пределы при прекращении
работы устройства синхронизации.
Для
построения графика зависимости
![]() составим таблицу расчетных значений.
составим таблицу расчетных значений.
|
В, Бод |
300 |
600 |
1200 |
2400 |
4800 |
9600 |
|
tп.с, с |
7 |
3,5 |
1,757 |
0,88 |
0,44 |
0.22 |

Рис.2,4. График зависимости tп.с, от В
Задача 2:В системе передачи данных используется устройства синхронизации без непосредственного воздействия на частоту задающего генератора. Скорость модуляции равна В=1258 Бод. Шаг коррекции должен быть не более 0,012. Определить частоту задающего генератора (ЗГ) и число ячеек делителя частоты, если коэффициент деления каждой ячейки равен 2.
Значения В, определите для своего варианта по формулам:
Исходные данные:
B = 1259 Бод.
= 0,012
Найти
![]() и
и![]()
Решение:
Определим расчетное значение коэффициента деления делителя исходя из исходных данных[1, стр. 352]:
![]() ;
;
Т.к. коэффициент деления каждой ячейки 2 то получаем:
![]()
![]()
Следовательно, количество ячеек делителя частоты n=7;
Частота задающего генератора определяется как[1, стр.355]:
![]() (Гц)
(Гц)
Ответ: n = 7; fзг = 161,024 кГц
Задача 3. Рассчитать параметры устройства синхронизации без непосредственного воздействия на частоту ЗГ со следующими характеристиками: время синхронизации не более 1с (tc ≤ 1с), время поддержания синфазности не менее 10 с (tп.с ≥ 1с), погрешность синхронизации не более 15% единичного интервала 0 (ε≤15%). Среднеквадратичное значение краевых искажений равно 10%0, исправляющая способность приемника = 52%, коэффициент нестабильности генераторов K = 10-5. Скорость модуляци В = 905 Бод.
Исходные данные:
![]()
![]()
![]()
![]()
![]() Бод
Бод
![]()
ε≤15%
Определить:
![]()
Решение:
Для решения задачи понадобятся следующие формулы [1, стр.353-354]:
![]()

где
 [1,стр.353],
подставим данное выражение в нашу
формулу:
[1,стр.353],
подставим данное выражение в нашу
формулу:
![]() ,
выразим S
,
выразим S![]()
![]() ;
;
![]()
 ,где
,где
![]() ,
значит получим
,
значит получим
 ,
теперь подставим численные значения
находим емкость реверсивного счетчика:
,
теперь подставим численные значения
находим емкость реверсивного счетчика:

Из
выше приведенной формулы находим
коэффициент деления делителя
![]() :
:
![]() ,
зная коэффициент деления делителя
находим частоту задающего генератора:
,
зная коэффициент деления делителя
находим частоту задающего генератора:
![]() (Гц)
или
(Гц)
или
![]() кГц
кГц
Ответ:
![]() ;
;![]() ;
;![]() кГц
кГц
Задача 4. Определить реализуемо ли устройство синхронизации без непосредственного воздействия на частоту ЗГ обеспечивающее погрешность синхронизации =3% при условиях предыдущей задачи.
Исходные данные:
= 3%
Реализуемо ли устройство синхронизации-?
Решение:
Воспользуемся решением предыдущей задачи, в ней мы вывели формулу для расчета емкости реверсивного счетчика, найдем емкость счетчика при заданном значении погрешности синхронизации:

Вывод: устройство не реализуемо, т.к. емкость счетчика не может быть отрицательным значением.
Задача
5. В СПД
используется устройство синхронизации
без непосредственного воздействия на
частоту ЗГ с коэффициентом нестабильности
К=0,0001
.Коэффициент деления делителя ![]() =12,емкость
реверсивного счетчика S=15.
Смещение ЗМ подчинено нормальному
закону с нулевым математическим ожиданием
и СКО равным
=12,емкость
реверсивного счетчика S=15.
Смещение ЗМ подчинено нормальному
закону с нулевым математическим ожиданием
и СКО равным ![]() =25,5%
длительности единичного интервала.
Рассчитать вероятность ошибки при
регистрации элементов методом
стробирования без учета и с учетом
погрешности синхронизации. Исправляющую
способность приемника равна 45%.
=25,5%
длительности единичного интервала.
Рассчитать вероятность ошибки при
регистрации элементов методом
стробирования без учета и с учетом
погрешности синхронизации. Исправляющую
способность приемника равна 45%.
Исходные данные:
k=10-4
![]() =12
=12
S=15
![]()
![]()
![]()
Определить:![]()
Решение:
При
![]() :
:
![]() [1,
стр.357], где
[1,
стр.357], где
![]() соответственно
вероятности смещения левой и правой
границ единичного элемента на величину
больше
соответственно
вероятности смещения левой и правой
границ единичного элемента на величину
больше![]() .
Т.к. смещения значащих моментов подчинены
нормальному закону то:
.
Т.к. смещения значащих моментов подчинены
нормальному закону то:

Т.к.
устройство по элементной синхронизации
вырабатывает синхроимпульсы ( стробирующие
импульсы) с некоторым смещением
(погрешностью
![]() ),
то получим:
),
то получим:

Плотности
вероятности
![]() и
и![]() описываются гауссовым законом с
параметрами
описываются гауссовым законом с
параметрами![]() и
и![]() ,
то вероятности можно выразить через
функцию Крампа
,
то вероятности можно выразить через
функцию Крампа :
:
![]() ,
где
,
где
![]() ;
;
![]() ,
где
,
где
![]() .
.
Найдем значение погрешности синхронизации по формуле[1,стр.353]:
 ;
;
![]() ,
теперь можно найти
,
теперь можно найти
![]() :
:
![]()
![]()
.
Зная
![]() можно определить
можно определить![]() :
:
![]()
![]()
Таким образом общая вероятность ошибки:
![]()
При
![]() :
:
![]()
![]()
![]()
Ответ:
![]() ,
,![]()