

Классификация регуляторов
Автоматические регуляторы классифицируются по разным признакам:
по виду регулируемого параметра, по роду и способу действия, по характеристике действия и т.д.
В зависимости от вида регулируемой величиныразличают регуляторы: давления, расхода, уровня, температуры и др. конструкция этих регуляторов может быть самой разнообразной, однако часто одна и та же конструкция применяется для регулирования различных параметров.
По роду действияавтоматические регуляторы подразделяются на регуляторы прерывистого и непрерывного действия. Регуляторами прерывистого действия называют такие, у которых регулирующий орган перемещается только при достижении непрерывно изменяющейся регулируемой величины определенных заданных значений.
Регуляторами непрерывного действия называются такие, регулирующий орган которых при непрерывном изменении регулируемой величины перемещается непрерывно.
По способу действияразличают регуляторы косвенного и прямого действия. Регуляторами косвенного (непрямого) действия называются такие, у которых для перемещения регулирующего органа используется энергия, подводимая извне. По виду подводимой энергии регуляторы косвенного действия подразделяются на пневматические, электрические и гидравлические. Регуляторами прямого действия называются такие, в которых для перемещения регулирующего органа используется энергия, взятая у самого регулируемого органа. Регуляторы прямого действия отличаются простотой конструкции, они дешевы и несложны в обслуживании, надежны в работе. Однако пониженная чувствительность и невысокая точность ограничивают область их применения.
Рассмотренные выше виды классификации регуляторов не являются определяющими, так как не характеризуют их свойства. Основной признак, по которому классифицируются регуляторы независимо от принадлежности к одной из перечисленных выше групп, является характеристика действия, т.е. зависимость между изменением регулируемой величины и перемещением регулирующего органа (закон регулирования).
По характеру действия регуляторы подразделяются на следующие:
Обозначение
Позиционные Пз-регуляторы
Интегральные И-регуляторы
Пропорциональные П-регуляторы
Пропорционально-интегральные ПИ-регуляторы
Пропорционально-дифференциальные ПД-регуляторы
Пропорционально-интегрально- ПИД-регуляторы
дифференциальные
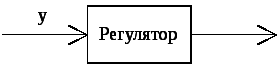
Рис. 2. Обозначения входной и выходной величин регулятора.
Δy– разбаланс;
μ – перемещение регулирующего органа.
Входной величиной регулятора является сигнал, пропорциональный разности между заданным и текущим значениями управляемой (регулируемой) величины; выходной – положение регулирующего органа (рис. 2).
Показатели качества регулирования
Наиболее распространенными критериями качества регулирования являются:
- статическая и динамическая ошибки регулирования;
- время регулирования;
- степень колебательности;
- интегральные критерии.
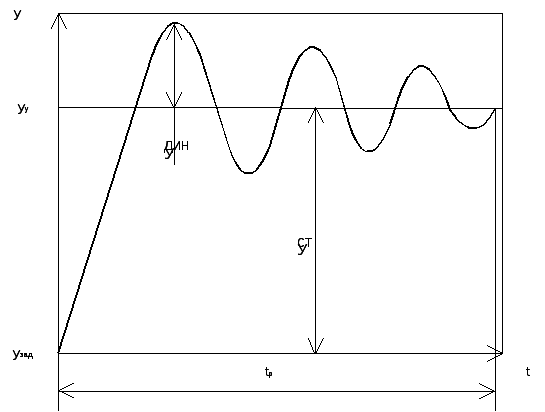
Рис.1. Критерии качества процесса регулирования
Из графика (рис.1) легко определить некоторые критерии качества, а именно:
- статическая ошибка устравна разности между установившимся значением регулируемой величины ууи ее заданным значением узад.
- динамическая ошибка удин равна наибольшему отклонению в переходном процессе регулируемой величины уу и ее заданным значением узад.
- время регулирования tр приближенно равно времени, за которое регулируемая величина станет практически равна заданной или установившейся (на графике – установившейся уу).
- степень колебательности характеризует интенсивность затухания колебательного процесса, причем не всего переходного процесса, а наиболее медленно затухающей составляющей. Количественной оценкой интенсивности затухания служит степень затухания ψ, определяемая по формуле: ψ = (у1– у3)/у1.
Наиболее часто на практике значения ψ лежат в пределах от 0,75 до 0,9.
Для оценки качества работы АСР существенными являются следующие вопросы: приведет ли регулятор регулируемую величину точно к заданному значению или будет иметь место статическая ошибка; какова максимальная величина разбаланса в ходе регулирования; каково быстродействие системы, т.е.как быстро завершится переходный процесс.