

Исполнительные механизмы и рабочие органы
Исполнительный механизм(ИМ) – это звено исполнительного устройства, предназначенное для перемещения затвора регулирующего органа в соответствии с управляющими сигналами (командной информацией).
По виду энергии, используемой для создания перестановочного усилия, ИМ делятся на:
- электрические;
- пневматические;
- гидравлические.
Электрические ИМ делятся на соленоидные и электродвигательные.
Пневматические ИМ могут быть мембраннымиипоршневыми.
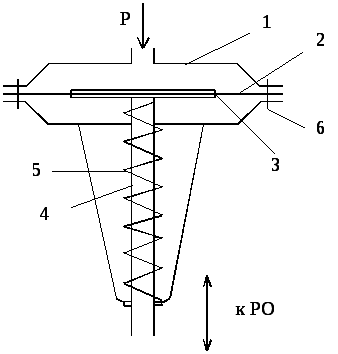
Рис. 1. Схема мембранного исполнительного механизма.
1 – корпус головки; 2 – мембрана; 3 – диск; 4 – шток; 5 – пружина; 6 – болты.
Между фланцами корпуса 1 с помощью болтов 6 зажата по периметру мембрана из прорезиненной ткани 2 с металлическим диском 3, который скреплен со штоком 4.
При отклонении регулируемой величины от заданного значения давление воздуха Р, поступающего от пневматического регулятора через медную трубку в полость над мембраной 2 и диском 3, изменяется, шток перемещается либо вниз (при увеличении давления), либо вверх (при уменьшении давления). Причем зависимость между давлением воздуха и перемещением штока имеет линейный характер.
Поршневой ИМ(рис.2.) состоит из цилиндра 1 с поршнем 2, шток которого 3 сочленяется с регулирующим органом РО. В зависимости от того, в какую полость цилиндра будет поступать управляющий сигнал, поршень со штоком будет перемещаться либо вправо, либо влево.
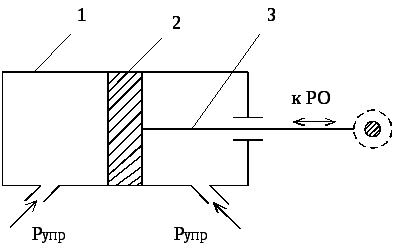
Рис.2 Схема поршневого исполнительного механизма
1 – цилиндр; 2 – поршень; 3 – шток.
Максимальное усилие, развиваемое поршневым ИМ равно 4,4*104Н, а максимальный ход поршня составляет 300 мм.
Гидравлические ИМ предназначены для преобразования сигнала (разности давлений масла), поступающего от гидравлического регулятора, в перемещение регулирующего органа. По принципу действия он аналогичен поршневому ИМ.
Регулирующий орган(РО) - это звено исполнительного устройства, непосредственно воздействующее на процесс путем изменения пропускной способности; представляет собой переменное гидравлическое сопротивление, воздействующее на расход среды за счет изменения своего проходного сечения.
Для непрерывного и позиционного регулирования применяются следующие типы РО:
- дисковые (заслоночные)РО, в которых изменение гидравлического сопротивления достигается за счет поворота относительно горизонтальной оси диска (заслонки), помещенного в специальную обойму.
- одно- и двухседельныеРО, в которых изменение гидравлического сопротивления достигается за счет поступательного перемещения затвора (плунжера) вдоль проходов одного или двух седел.
- трехходовыерегулирующие клапаны, предназначенные для смешения двух потоков или для разделения одного потока на два.
- шланговые РО отличаются от остальных тем, что регулируемое вещество проходит в них через эластичный патрубок (шланг), который, деформируясь под действием ИМ, изменяет площадь проходного сечения а, следовательно, и расход.
- диафрагмовые РК изменяют свое гидравлическое сопротивления благодаря поступательному перемещению центра диафрагмы относительно седла, представляющего собою перегородку в корпусе.
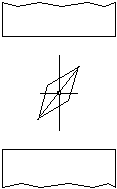
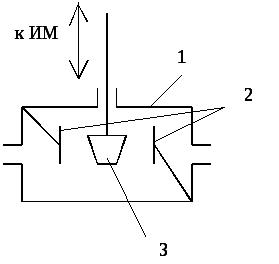
Рис.3. Дисковый РО Рис.4. Односедельный РО
1 – корпус; 2 – седло; 3 – затвор.