

Принципы регулирования
Принцип регулирования по отклонению(принцип Ползунова-Уатта).
Особенность его состоит в том, что регулятор в процессе регулирования оказывает воздействие на объект в том случае, если регулируемая величина отклоняется от заданного значения.
Принцип регулирования по возмущению(принцип Понселе).
Достоинство регулирования во возмущению состоит в том, что возмущающее
воздействие может быть устранено до того, как возникнет рассогласование. Но для
этого требуются идеально точные регуляторы, что практически недостижимо.
Комбинированные системы
Сочетаются положительные свойства первого и второго принципов, в которых
регулирующее воздействие осуществляется и по отклонению, и по возмущению.
Законы регулирования. Типовые переходные процессы регулирования
Всякая автоматическая система регулирования состоит из двух взаимодействующих между собой частей: объекта регулирования и регулятора. При этом качество переходного процесса и устойчивость регулирования зависят не только от статических и динамических свойств объекта, но и от регулятора.
Автоматические регуляторы представляют собой большую группу автоматических управляющих устройств, которые вырабатывают регулирующее воздействие в АСР, если регулируемая величина отклонится от заданного значения.
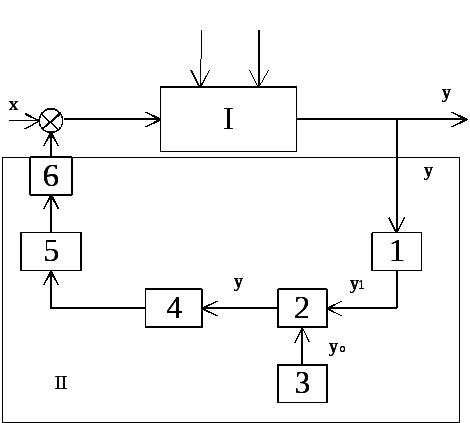
Рис. 1. Структурная схема регулятора:
I–объект регулирования;
II– регулятор;
1 – датчик;
2 – устройство сравнения;
3 – задатчик;
4 – управляющее устройство;
5 – исполнительный механизм;
6 – регулирующий орган.
Существует большое число разнообразных типов регуляторов, однако все они представляют собой совокупность некоторых специфических элементов, выполняющих определенные функции (рис. 1): датчика 1, устройства сравнения 2, задающего устройства 3, управляющего устройства 4, исполнительного механизма 5 и регулирующего органа 6.
Датчик производит непрерывное измерение
текущего значения регулируемой величины
yв объекте управления 1,
который испытывает возмущающие
воздействия λ, и преобразует эту величину
в сигнал![]() (например, электрический или пневматический).
(например, электрический или пневматический).
Задающее устройство выдает сигнал
![]() ,
соответствующий заданному значению
регулируемой величины. Устройство 2
сравнивает сигналы от датчика и задатчика
и в случае их различия (если заданное
значение регулируемой величины в данный
момент не равно текущему) выдает сигнал
рассогласования (разбаланс) Δyна управляющее устройство.
,
соответствующий заданному значению
регулируемой величины. Устройство 2
сравнивает сигналы от датчика и задатчика
и в случае их различия (если заданное
значение регулируемой величины в данный
момент не равно текущему) выдает сигнал
рассогласования (разбаланс) Δyна управляющее устройство.
Управляющее устройство преобразует, а в случае необходимости усиливает этот сигнал, и с помощью исполнительного механизма и регулирующего органа осуществляет управляющее воздействие μ на объект управления I, изменяя входную величину(x) так, чтобы выходная величинаyприняла первоначальное значение.
В конкретных случаях отдельные элементы регулятора могут быть объединены в одном блоке или вовсе отсутствовать.
Все элементы регулятора (кроме задающего устройства) образуют замкнутую цепь воздействий, в которой соблюдается принцип детектирования (сигнал от выхода к входу проходит в одном направлении).