14. Коррекция сау. Способы коррекции.
Для того чтобы добиться желаемого качества процесса управления (требуемой точности и качества переходного процесса) есть 2 пути:
Достигнуть этого путём изменения параметров данной системы.
Если же путём изменения параметров данной системы не удаётся получить желаемого результата используют 2 путь:
изменение структуры системы. Осуществляется путём введения дополнительных устройств или звеньев. Эти дополнительные звенья называют корректирующими звеньями или корректирующими устройствами.
Основная задача корректирующих устройств состоит в улучшении точности и качества переходных процессов.
Наряду с этим корректирующие устройства позволяют решать и более общую задачу. Позволяют сделать систему устойчивой если она была неустойчива и затем уже добиться желаемого качества управления.
Различают 3 основных вида корректирующих устройств:
Последовательные корректирующие устройства.
Повышается точность системы, повышается быстродействие.

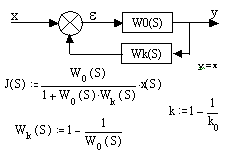
Для рисунка а) W(S) = Wk(S)W0(S)
W0(S) – передаточная функция исходной или корректирующей системы.
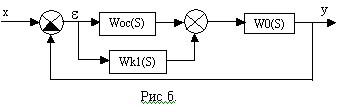
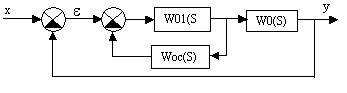
Для рисунка б) Wк(S) = Wос(S) + Wк1(S)
Параллельное корректирующее устройство
Wос(S) (дополнительные местные обратные связи) охватывает звено или часть системы.
Корректирующие устройства по внешнему воздействию.
Передаточные функции Wк(S), Wос(S) могут иметь произвольный вид, но чаще применяются корректирующие устройства определённого вида.
Действия корректирующих звеньев сводиться к следующему:
Введение в контур САУ воздействия по производным и интегралам.
Введение корректирующих обратных связей вокруг определённой части системы.
Введение корректирующих воздействий функций внешних воздействий и их производных.
Введение воздействий по производным и интегралам осуществляется с помощью последовательных корректирующих устройств. Организация местных обратных связей осуществляется с помощью параллельных корректирующих устройств.
15. Коррекция сау в функции внешних воздействий. Инвариантность.
Инвариантность. Основной принцип АР состоит в формировании управляющего воздействия по величине ошибки. Сюда же могут добавляться сигналы производных и интеграла ошибки. Если же вводится корректирующее устройство по внешнему воздействию, то получается комбинированное управление (и по ошибке и по внешнему воздействию)
Путём введения коррекции по внешнему воздействию удаётся при определённых условиях свести величину установленной ошибки к нулю при любой форме внешнего воздействия. Это свойство называется инвариантностью системы по отношению к внешнему воздействию.
Корректирующие устройства по задающему воздействию

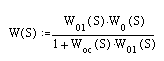
Передаточная функция ошибки:
![]()
Установившееся ошибка будет равна 0, если числитель будет = 0.
Передаточная функция корректирующего устройства. Wk(S) = 1/W0(S)
Полному условию инвариантности удовлетворить нельзя, но можно подобрать определённую область частот, в которой будет обеспечиваться инвариантность.
Коррекция по возмущающему воздействию

– возмущающее воздействие вводится с противоположным знаком:
Инвариантность – это нечувствительность, она может оцениваться.
Одним из способов достижения инвариантности является неединичная главная ОС.