

9. Устойчивость систем управления. Алгебраические критерии устойчивости.
Устойчивость – свойство системы возвращаться в исходный или близкий к нему установившийся режим после всякого выхода из него в результате какого-либо воздействия. Это свойство затухания переходного процесса с течением времени.
Для тех объектов, которые работают в условиях непрерывно меняющихся воздействий, т.е. когда установившийся режим вообще отсутствует, дается общее определение устойчивости:
Система устойчива, если её выходная величина остаётся ограниченной в условиях действия на систему ограниченных по величине возмущений.
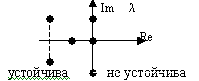
Yсв →0 при t→∞ , если все корни характеристического уравнения λ обладают отрицательной вещественной частью.
Если хотя бы один вещественный корень λi будет положительным или хотя бы одна пара комплексно-сопряженных корней будет иметь положительную вещественную часть, то в этом случае процесс будет расходящийся.
Если в характеристическом уравнении системы имеется хотя бы один нулевой корень или хотя бы одна пара чисто мнимых корней λi,i+1 = +jβ , то система будет находиться на границе устойчивости.
Алгебраические критерии. Вычисление корней уравнений высоких степеней затруднительно, поэтому в ТАУ были разработаны косвенные методы, позволяющие судить об устойчивости системы, не находя корней характеристического уравнения. Эти косвенные методы получили название алгебраических критериев. Из алгебраических критериев в ТАУ получили распространение 2 критерия: критерий Раусса, критерий Гурвица.
Возьмем характеристический полином – левая часть урав-ия: D(λ) = a0*λn + a1*λn -1 +…+ an -1*λ + an
Критерий Раусса-Гурвица позволяет определять устойчивость системы по коэффициентам хар. урав-ия.
Необходимым условием устойчивости явл.
положительность всех коэф. хар. ур-ия.
a0>0, a1>0 … an>0.
Положительности коэффициентов характ. уравнения в общем случае недостаточно для устойчивости системы. Только в частных случаях, когда уравнение 1-ой или 2-ой степени, положительность коэф-тов явл. необходимым и достаточным условием устойчивости.
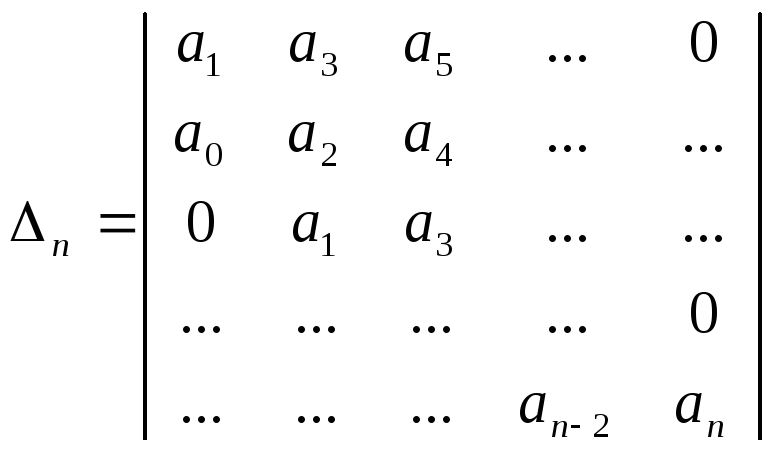
Чтобы сформулировать критерий Гурвица необходимо составить определитель вида:
 - определитель
Гурвица
- определитель
Гурвица
Для устойчивости линейной системы необходимо и достаточно, чтобы были положительными n-главных определителей Гурвица (диагональные миноры). Δn = an*Δn-1 (an >0, Δn-1 >0)
Δ1=a1
![]()

Критерий Раусса-Гурвица применяется для систем не выше 4-го порядка. Критерий применяется для анализа систем, у которых известны все коэффициенты характеристического уравнения.
10. Качество установившихся процессов в линейных сау. Коэффициенты ошибок.
Одного фактора устойчивости для нормального функционирования СУ недостаточно. При устойчивой САУ важно также как она выполняет свое функциональное назначение. Требования к системам управления могут быть различными. Это может быть быстродействие системы, энергопотребление, уровень шума и т.д. Совокупность требований, определяющих поведение САУ в установившихся и переходных процессах объединяется понятием качества процесса управления. Качество имеет смысл только для устойчивых САУ. Качество оценивается при наиболее часто встречающихся или наиболее тяжелых для данной системы типовых воздействий.
f (t) = δ(t) – единичный импульс.
f (t) = 1(t) – единичный скачок.
f (t) = sin ωt - гармонический сигнал.
f (t) = const – постоянные воздействия.
5. f(t) = υt – сигнал, изменяющийся с постоянной скоростью.
6. f(t) = a*t2/2 – сигнал, изменяющийся с постоянным ускорением.
Качество процесса управления можно рассматривать раздельно для установившихся процессов и для переходных процессов.
Качество установившихся режимов работы САУ.
Главным показателем является точность. Точность оценивается величиной ошибки.
Р/м статический режим. Он характериз. тем, что и задающее и возмущающее воздействие явл. постоянными величинами. Такой режим характерен для статических систем. Р/м структуру:
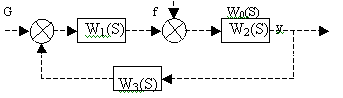
Y(S) = Фв(S)*Ф(S) Фв(S)= W2(S)/(1+W(S))
W(S) =W1(S)*W2(S)*W3(S) = Wp(S)
W2(S) = W0(S)
Для
статики, когда S=0
→ F(0)=fст,
Y(0)=yст yст
= Фв(0)*
fст
=![]() .
.
Статический режим имеет место только в статических САУ.
Статической САУ наз. такая САУ, которая целиком состоит из статических звеньев.(в рез-тате приведения к одноконтурной). W(0)=k - статическое звено (инерционное, апериодическое, колебательное). У статического звена есть статическая хар-ка yст/fст =k
W(0)=k
yст=k0*
fст
– в разомкнутом состоянии.
![]() - в замкнутом состоянии.
- в замкнутом состоянии.
Замыкание системы создает знаменатель и отклонение y под действием f в (1+k) раз меньше, чем в разомкнутой системе. yст –статическая ошибка. Мерой статической точности САУ явл. статизм δ.
Г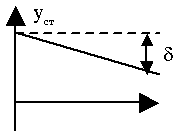 рафик
изменения статической ошибки от
возмущающего воздействия.
Δ
нельзя
уменьшить за счет коэффициента k0.
В САУ статич.
рафик
изменения статической ошибки от
возмущающего воздействия.
Δ
нельзя
уменьшить за счет коэффициента k0.
В САУ статич.
ошибка измен. за счет общего коэф-та передачи k. В статич. САУ по принципу действия стат. ошибка не может = 0.
Способы устранения статической ошибки.
Увеличение коэф-та передачи системы. Оно не может осущ. не ограниченно, т.к. это ведет к потере уст-ти системы.
Передаточная ф-ия по каналу возмущения =0.
Фf(0)
=![]() (Знаменатель приравниваем к ∞, или
чиcлитель
приравниваем к 0).
(Знаменатель приравниваем к ∞, или
чиcлитель
приравниваем к 0).
П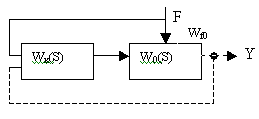 ри
реализ-ии управления по возмущению,
возмущение в системе прикладывается
по 2 каналам:
ри
реализ-ии управления по возмущению,
возмущение в системе прикладывается
по 2 каналам:
1. естественному;
2. искусственному.
Wк(S) – передат. ф-ия управления по возмущению.
Wf(S) = Wf0(S) + Wk(S)*W0(S)
Wf(0) = Wf0(0) + Wk(0)*W0(0)
Kf0 = kk*k0=0; kk = - kf0/ k0 - коэф-т передачи по искусств. каналу.
«-» означает, что корректирующую связь мы должны заводить с обратным знаком по возмущающему воздействию.
Такой способ устранения статической ошибки устраняет только ту статическую ошибку, возмущение по которой можно проконтролировать.
2-ой путь компенсации статической ошибки – введение астатизма. Астатической наз. САУ, структурные схемы которых, будучи приведенные к одноконтурным, содержат хотя бы одно интегрирующее звено (астатическое). У интегрир. звеньев характеристики астатические. Закон регулирования в астатич. САУ интегральный, т.е. выход. сигнал регулятора пропорц. интегралу от ошибки. Если вне объекта имеется хотя бы одно интегрирующее звено, то статич. ошибка, вызванная любой причиной, по принципу действия такой САУ=0.Интегрирующее звено будет изменять управляющее воздействие на объект до тех пор, пока на входе интегрир. звена сигнал не будет = 0, т.е. пока ошибка не станет = 0.
Постоянные ошибки. Среди типовых режимов работы САУ простейшим явл. режим работы при постоянной величине внеш. воздействия (задающего, возмущающего).
G(t)
= const
W(S)
=
![]() ,
свободный член = 1
,
свободный член = 1
Фε(S)
=
![]() (1)
(1)
Диф. ур-ие в операторной форме:
[L(p) + kN(p)]*ε = L(p)*x(t) (2)
Если к записи (2) применить теорему о конечном значении,то εуст = lim ε(t) =lim Фε(S)*X(S)*S (3) X(S)=X0/S
Пользуясь (3) с учетом (1) запишем: εуст = X0/(1+k), если L(S) и N(S) имеют свобод. член = 1.
Это значение ошибки наз. статической ошибкой. Её можно получить из диф. ур-ия (2) как частное решение при X(t)=X0. Р/м случай, когда на вход системы подается задающее воздействие, изменяющееся с постоянной скоростью. X(t)= X0 + X1(t). В этом случае установившаяся ошибка, как частный случай ур-ия (2) так же будет изменяться с постоянной скоростью. Естественно, что при длительном воздействии такое нарастание ошибки недопустимо. Для ликвидации этого явления нужно изменить структуру системы так, чтобы L(S) не имел свободного члена. L(S)=S*L(S) (6). Надо сделать так, чтобы знаменатель передаточной ф-ии разомкнутой цепи имел нулевой полюс: X(S) = X0/S + X1/S2.Получим: εуст = X1/k. В такой системе при задающем воздействии, изменяющемся с постоянной скоростью, не будет статической ошибки. Но при этом в системе устанавл-ся скоростная ошибка. Если система содержит хотя бы одно интегральное звено, то в системе присутствует скоростная ошибка. Если система имеет астатизм 1-го порядка (6), то в ней отсутствует статическая ошибка и присутствует постоянная скоростная ошибка.