

1. Принцип управления. Классификация систем управления.
Существует фундаментальный принцип управления. У каждой системы есть алгоритм функционирования. Мы формируем алгоритм управления (формирование управляющего воздействия на ОР). Существует 3 принципа управления:
принцип разомкнутого управления
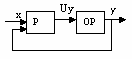
принцип компенсации или управления по возмущению
принцип о.с. или регулирования по отклонению
комбинированный способ – различные комбинации предыдущих.
Принцип разомкнутого управления
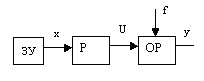
Алгоритм управления вырабатывается только на основе заданного алгоритма функционирования, при этом не контролируется не возмущения не выходные параметры.
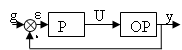
Принцип регулирования по отклонению
Если сигнал о.с. формир. только при изменении выходной переменной, то такая о.с. наз. гибкой. Если сигнал, подаваемый на вход системы пропорционален только значению выходной переменной, то это жесткая о.с. (стабилизация U генератора постоянного тока).В расмотренном примере существует ЖОС. Когда на систему действует возмущающее воздействие, то организуется принцип управления по возмущению(в дизель-генераторах).
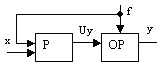
При реализации принципа управления по возмущению добиваются инвариантности – нечувствительности к возмущению.
Управление по отклонению обычно наз. регулированием. Y=G(заданное значение) при наличии f – задача автоматического рег-ия. В зависимости от характера изменения задающего воздействия САР делятся на 3 вида:
Системы стабилизации – они задают воздействия постоянно.
Системы программного регулирования – G=F(z) – задающее воздействие изменяется по заранее заданному закону.
Задающее воздействие определяет заданное значение выходной величины. Заданное значение может быть либо постоянным либо переменным во времени.
Следящие системы – G = var – задающее воздействие изменяется, но закон изменения заранее не известен.
В зависимости от характера действующего в системе сигнала: непрерывные, дискретные.
В зависимости от стабильности параметров во времени: стационарные, нестационарные, детерминированные.
В зависимости от уравнения системы: линейные, нелинейные. В зависимости от рода используемого сигнала: электронные, пневматические, гидравлические, электромеханические и т.д.
Системы м.б. одномерными (системы с одним входом и одним выходом) и многомерными.
2. Алгоритмы и законы регулирования
Система состоит из регулятора и объекта регулир-я. Регулятор формирует упр. возд-е на объект регул-я.
Совокупность предписаний по которым формируется управляющее воздействие на объект регулирования назыв. законом регулирования (управления) – алгоритмы управления.
Математически закон управления определяется уравнением регулятора.
U=f(ε)-закон рег-я
Различают П(пропорциональный), И(интегральный) и Д (дифференциальный)– законы управления.
Uп= kE
Uи=k![]()
Uд=kdE/dt
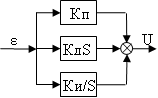
Обобщенная структура ПИД – регулятора.
3. Математическое описание сау. Модели вход-выход.
Для решения задач САУ (анализ системы или синтез системы) нужно получить математическое описание системы (математическую модель системы) – дифференциальное уравнение физического закона.
Получение модели начинается с разбиения системы на звенья направленного действия - передают сигнал в одном направлении, и изменение звена не влияет на состояние предшествующего звена, работающего на его вход. Разбиение системы на звенья производится исходя из простоты их дифф. уравнений (не выше 2 порядка). Затем для каждого звена составляется передаточная функция.
Математическое описание системы – это либо система из n дифференциальных уравнений 1 порядка, либо дифференциальное уравнение n порядка. После составления диффер. ур-ния на основании преобразования Лапласа составляют передаточную функцию.
![]()
Или в операторном виде через преобразование Лапласа: A(s)Y(s)=B(s)X(s)
Ф(s)=Y(s)/X(s)=B(s)/A(s) – передаточная функция (описание в системе вход – выход)

![]()
Δy=k*Δx
Если использовать преобр-е Лапласа, то получим передат. ф-цию.
W(s) = Y(s)/X(s)
Схема, составленная из звеньев направленного действия, называется структурно-динамической – составляется на основании передаточных функций каждого звена.