

4. Математическое описание сау. Модели вход-состояние-выход.
Для решения задач САУ (анализ системы или синтез системы) нужно получить математическое описание системы (математическую модель системы).
Получение модели начинается с разбиения системы на звенья по математическому описанию, причем звенья направленного действия передают сигнал в одном направлении и изменение состояния этого звена не влияет на состояние предшествующего звена, работающего на его вход. Для каждого звена запис-ся физич. законы, кот. лежат в основе его ф-ционир-я.
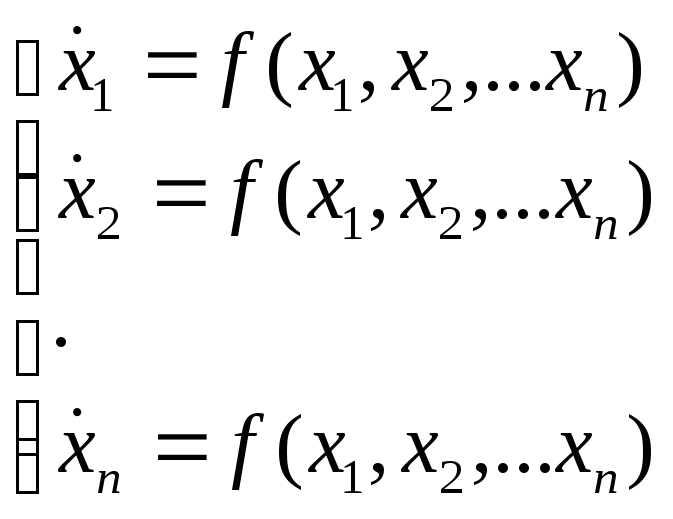
В общем случ. Получается диф. ур-е N-ого порядка.
Если учитывать все факторы ур-е получится нелин-ное. Для иссл-я исп-ют лин. ур-я, кот., получаются после линеариз. Линеариз. получ-ся после разл-я в ряд Тэйлора и отбрас-я состовл. высших порядков.
![]()
Δy=k*Δx
Ур-я запис-ся в нормальной форме Коши.
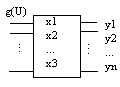
вектор х – точка в фазовом пространстве, в кажд. мом. вр. Она занимает определенное положение.
g – задания по каждому параметру
U – воздействие со стороны регулятора на пар-р.
![]() =AX+BU
=AX+BU
Y=CX
Модель Вход-Состояние-Выход исп-ся для сложных систем.
5. Математическое описание звеньев и сау. Типовые звенья.
Для решения задач САУ (анализ системы или синтез системы) нужно получить математическое описание системы (математическую модель системы).
Получение модели начинается с разбиения системы на звенья по математическому описанию, причем звенья направленного действия передают сигнал в одном направлении и изменение состояния этого звена не влияет на состояние предшествующего звена, работающего на его вход.
Типовые звенья САУ различают по виду их передаточной функции и виду дифференициалного уравнения. Различают 3 основных группы:
1) позиционные;
2) дифференцирующие;
3) интегрирующие.
Позиционными звеньями называются такие звенья, в передаточной функции которых многочлены N(S) и M(S) имеют свободный член, равный 1, т.е. эти звенья обладают статической характеристикой.
![]()
У дифферициальных звеньев в передаточной ф-ции отсутствует свободный член числителя.
![]()
У интегрирующих звеньев в передаточной функции отсутствует свободный член знаменателя.
![]()
![]() (идеальное
усилительное)
(идеальное
усилительное)
![]() (идеальное
дифференцирующее)
(идеальное
дифференцирующее)![]() (идеальное
интегрирующее)
(идеальное
интегрирующее)
6. Типовые воздействия в системе и реакция на них.
Типовые воздействия - наиболее часто встречающиеся или наиболее тяжелые для данной системы воздействия.
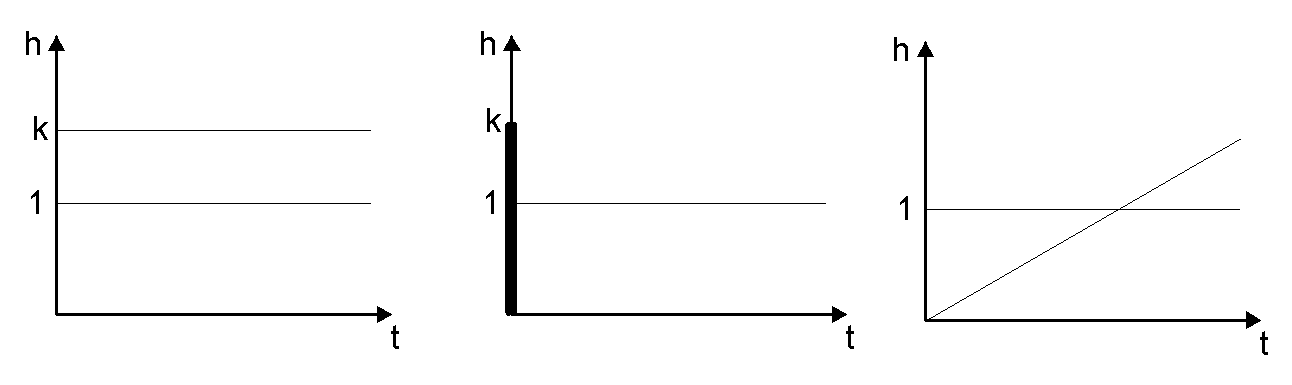
1. f (t) = δ(t) – единичный импульс.
2. f (t) = 1(t) – единичный скачок.
3. f (t) = sin ωt - гармонический сигнал.
4. f (t) = const – постоянные воздействия.
5. f(t) = υt – сигнал, изменяющийся с постоянной скоростью.
6. f(t) = a*t2/2 – сигнал, изменяющийся с постоянным ускорением.
Реакция на них:
весовая ф-ия k(t)
переходная ф-ия h(t)
3. формулы и графики, отражающие гармонический сигнал – частотные характеристики A(ω), φ(ω), логарифмические характеристики Lm(ω), φ(ω);
W(jω) = A(ω)*ejφ(ω) – выражает и амплитуду и фазу.
Весовой
ф-ей звена наз. оригинал передаточной
ф-ии (обратное преобразование Лапласа
от передаточной ф-ии).k(t)=L-1{W(S)}=
![]()
Si – все полюса передаточной ф-ии W(S).
Y(S) = W(S)*X(S)
K(t) = y(t) если X(S)=1→ X(t)=δ(t)
δ(t)- идиализированный импульс с бесконечно большой амплитудой
Весовая ф-ия – реакция звена на единичный импульс.

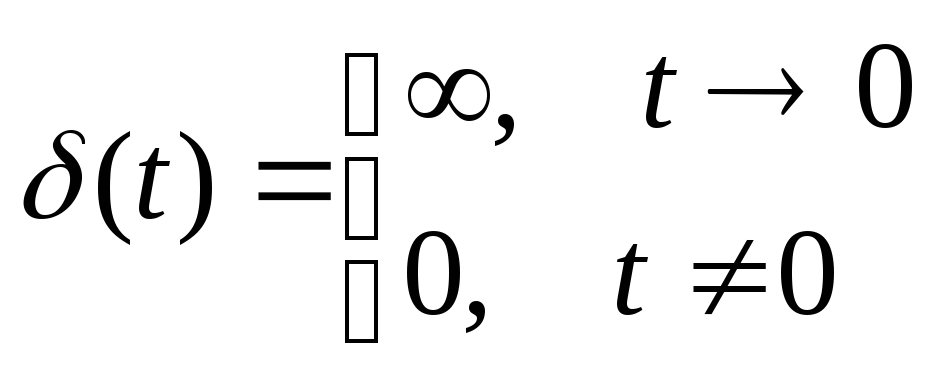
Физ. Смысл - K(t) – переходный процесс на выходе звена при подаче на его вход единичного импульса.
Зная весовую ф-ию K(t) можно всегда определить передаточную ф-ию.
С начала
определяем реакцию на каждый единичный
импульс, а затем все это интегрируем
начала
определяем реакцию на каждый единичный
импульс, а затем все это интегрируем
W(S) = L{k(t)} – прямое преобразование Лапласа
П ереходной
ф-иейh(t)
наз. реакция звена на единичное ступенчатое
воздействие, т.е. это переходный процесс
на выходе звена при единичном скачке
на его входе.
ереходной
ф-иейh(t)
наз. реакция звена на единичное ступенчатое
воздействие, т.е. это переходный процесс
на выходе звена при единичном скачке
на его входе.
1, t ≥ 0
1(t) = 0, t < 0
X(S) = L{1(t)} = 1/S Y(S) = W(S)*X(S)= W(S)/S
Y(t) = h(t) = L-1{1/S*W(S)}
δ(t)
=
![]() k(t) =
k(t) =![]()
Имея одну из 3-х характеристик можно найти любую из недостающих.
Частотными хар-ми наз. формулы и графики, характеризующие реакцию звена на синусоидальное входное воздействие в установившемся режиме, т.е. вынужденные синусоидальные колебания.
X(t) = sin ωt y(t) = Asin (ωt + φ)
X(t) = ejωt ejωt = cos ωt + jsin ωt
Для суждения о вынужденных синусоидальных колебаниях нужно исследовать реакцию звена на сигнал ejωt. Для того чтобы перейти к частотным хар-кам нужно оператор S заменить на jω.
[W(S)]s=jω = W(jω) =A(ω)*ejφ(ω).
A(ω) = │W(jω) │ - амплитуд. Хар-ка
Φ(ω) = arg W(jω) – ФЧХ
W(jω) = A(ω)*ejφ(ω) - АФЧХ.
Годограф – траектория, которую описывает конец радиус-вектора при изменении ω от 0 ∞ (в полярных координатах).
В прямоугольных координатах:
W(jω) = U(ω) + jV(ω)
A(ω) = √U2(ω) + V2(ω)