

4. Типовые комбинационные схемы. Назначение, принципы построения, примеры использования.
Типовые узлы ЭВМ.
Удобной мат. Моделью при решении задач анализа и синтеза любой структурной единицы ЭВМ является цифровой автомат (любое устройтсво обработки информации в цифровом виде).
ЦА без памяти.
ЦА с памятью (конечные или последовательные).
Любой ЦА является дискретным уст-вом, т.е. входные и выходные сигналы изменяются в дискретные моменты времени. Для отображения этого факта надо использовать дискретное время.
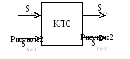
КЛА
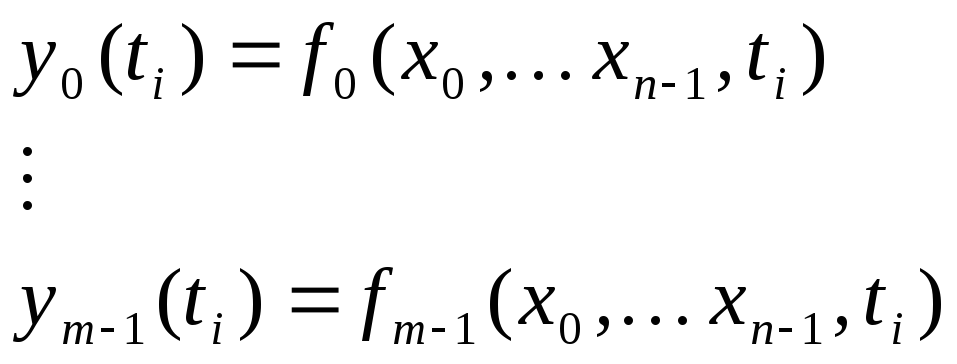
В них выходные сигналы в некоторый момент времени ti однозначно определяются входными сигналами в совпадающие моменты времени. Для мат. Описания КЛС достаточно аппарата логики, при этом каждый выход КЛС описывается логической функцией, число аргументов которой равно числу логических форм.
 , где xj
– логическая переменная, модулир. сигнал
на i-том
входе, yj
- на выходе.
Чтобы определить логическую структуру
КЛС достаточно рассмотреть каждый выход
КЛС как независимую логическую
функцию.Однако, минимизация отдельных
выходов не гарантирует минимизацию КЛС
в целом. Для поиска минимальной структуры
КЛС надо учитывать зависимость между
выходами КЛС.
, где xj
– логическая переменная, модулир. сигнал
на i-том
входе, yj
- на выходе.
Чтобы определить логическую структуру
КЛС достаточно рассмотреть каждый выход
КЛС как независимую логическую
функцию.Однако, минимизация отдельных
выходов не гарантирует минимизацию КЛС
в целом. Для поиска минимальной структуры
КЛС надо учитывать зависимость между
выходами КЛС.
Если лог. ф-ии имеют общие члены, то такие ф-ии можно упростить путем введения вспомогательных переменных.
![]() ,
,
![]() ,
,
![]() .
.
Заменим
![]() .
Быстродействие хуже, т.к. сначала
считаетсяy,
а потом все остальное. Увеличивается
число последовательно соединенных ЛЭ.
.
Быстродействие хуже, т.к. сначала
считаетсяy,
а потом все остальное. Увеличивается
число последовательно соединенных ЛЭ.
Выражение одной логической функции через другую.
Пример. КЛС имеет два выхода.
![]()
![]() ,
,
Рассмотрим S как лог. ф-ию от 4-х переменных x,y,z и p. Из 16 наборов переменных 8 старших наборов явл. запрещенными, т.е они не могут иметь место в реальном устр-ве.
Цифровой компаратор, дешифратор, мультиплексор:
К омпаратор:
сравнение кодов.
омпаратор:
сравнение кодов.
Применение: делитель с переменным коэффициентом деления.
Дешифратор: устройство преобразует входной 2-ый код в в позиционный (десятичный)
П ДС
Мультиплексор – демультиплексор(наоборот): объединяет несколько входов на один выход.
П рименение:
мультиплексированные линии адреса -
данных.
рименение:
мультиплексированные линии адреса -
данных.
Дешифратор относится к преобразователем кодов.
В зависимости от входного двоичного кода на входе дешифратора возбуждается одна и только одна из выходных цепей.
Двоичные шифраторы выполняют операцию, обратную по отношению к дешифратору. При возбуждении одного из входов шифратора на его на его выходе формируется двоичный код номер возбужденноё входной линии.
Мультиплексоры осуществляют подключение одного из входных каналов к выходному под управлением управляющего слова. Коммутаторы (устройства сравнения) определяют отношение между двумя словами.
5.Триггеры.
Т
 риггер
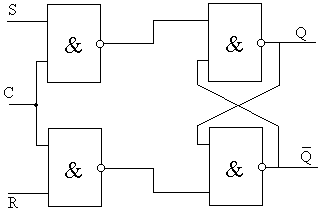
– элементарные автоматы, содержащие
собственно элемент памяти(фиксатор) и
схему управления. Фиксатор сроится на
двух инверторах, связанных друг с другом
накрест, так что выход одного соединяется
со входа другого. Если на входе инвертора
1 имеется логический 0, то он обеспечивает
на входе инвертора 2 логическую 1, то же
согласование сигналов имеет место и
для второго состояния, когда инвертор
1 находится в логической единице, а
инвертор 2 в 0.
риггер
– элементарные автоматы, содержащие
собственно элемент памяти(фиксатор) и
схему управления. Фиксатор сроится на
двух инверторах, связанных друг с другом
накрест, так что выход одного соединяется
со входа другого. Если на входе инвертора
1 имеется логический 0, то он обеспечивает
на входе инвертора 2 логическую 1, то же
согласование сигналов имеет место и
для второго состояния, когда инвертор
1 находится в логической единице, а
инвертор 2 в 0.
Такое соединение дает цепь с двумя устойчивыми состояниями.
Классификация триггеров проводится по признакам логического функционирования и по способу записи информации. По логическому функционированию различают триггеры типов RS,D,T,JK и др.
Кроме того, используются комбинированные триггеры, в которых совмещается одновременно несколько типов.
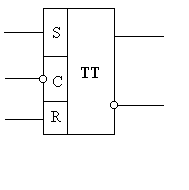
Триггеры типа RS имеют 2 входа – установки в единицу (S) и установки в 0 (R).
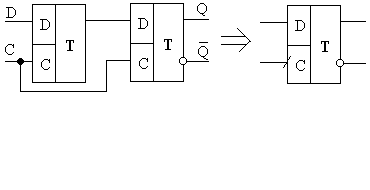
Триггеры типа D(задержка) имеет один вход. Его состояние повторяет входной сигнал, но с задержкой, определяемой тактовым сигналом.
Триггеры типа Т изменяет своё состояние каждый раз при поступлении входного сигнала. Имеет один вход и называется триггером со счётным входом или счётным триггером.
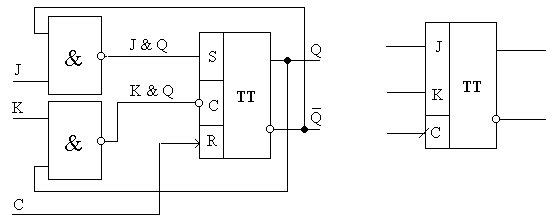
Триггер типа JK универсален, он имеет входы установки (J) и сброса (K) подобные входам триггера SR. В отличие от последнего допускает ситуацию с одновременной подачей сигналов на оба эти входа (J=K=1). В этом режиме работает как счётный триггер относительно третьего (тактового) входа.
В комбинированных триггерах совмещается несколько режимов.
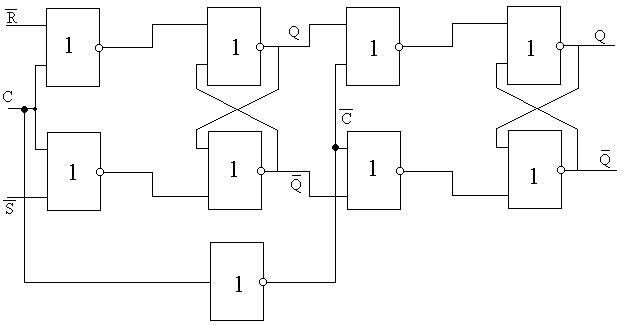
По способу записи информации различают асинхронный и синхронный триггеры (не тактируемые и тактируемые)
В не тактируемых переход в новое состояние вызывается непосредственно изменением входных информационных сигналов.
В тактируемых, имеющих специальный вход, переход происходит только при подаче на этот вход тактовых сигналов.
По способу восприятия тактовых сигналов триггеры делятся на управляемые уровнем и управляемые фронтов.
Динамический вход может быть прямым и инверсным. Прямое динамическое управление означает разрешение на переключении при изменении тактового сигнала с нулевого значения на единичное, инверсное – при изменении тактового сигнала с единичного значения на нулевое.
Уравнение триггера:

 JK:
Qn = JQ
QK D: Qn = D
JK:
Qn = JQ
QK D: Qn = D