

Определение места судна по пеленгу и расстоянию
Определение места судна по пеленгу и расстоянию — способ, наиболее часто употребляемый при использовании радиолокатора Обычно пеленг и расстояние измеряют до одного ориентира, однако бывает целесообразнее измерить пеленг на светящийся маяк по компасу, а расстояние измерить до берега В первом случае угол пересечения линий положения будет равен 90°, а во-втором — разности пеленгов, снятых с карты. Расстояние может быть измерено с помощью секстана по вертикальному углу либо получено приближенно по открытию маяка или глазомерно, при плавании по фарватеру или в узкостях. Чтобы уменьшить ошибки неодновременности наблюдений, вначале измеряется расстояние, а затем берется пеленг при положении предмета ближе к траверзу и в обратной последовательности — при острых курсовых углах. Обсервованное место получается на линии ИП на расстоянии от предмета, равном D.
Известно, что ошибки линии положения пеленга и расстояния
![]()
П![]() ри
измерении пеленга и расстояния до одного
ориентира средняя квадратичная
ошибка места судна равна (угол Θ = 90°).
ри
измерении пеленга и расстояния до одного
ориентира средняя квадратичная
ошибка места судна равна (угол Θ = 90°).
При измерении пеленга и расстояния до разных объектов требуется знать угол пересечения. Тогда
![]()
Из формул (12.1) и (12.2) видно, что с увеличением расстояния точность определения понижается. Поэтому при выборе ориентиров следует отдавать предпочтение ближайшим из них. Кроме того, точность определения понижается с увеличением ошибок в измерении пеленга и расстояния. Способ имеет достоинство в том, что для определения места судна достаточно иметь в видимости один предмет. Этот способ хорошо использовать при плавании по створу. Недостаток способа в невозможности выявить промах в опознании ориентира и в измерениях.
Другие комбинированные способы определения места судна
В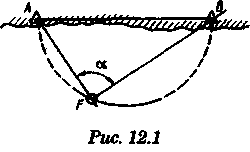 условиях морского плавания можно
предположить создание условий, когда
измерение двух навигационных параметров
затруднительно. К таким условиям
можно отнести выход из строя РЛС или
гирокомпаса, невозможность пеленгования
из-за закрытия объектов надстройкой
или палубным грузом, малое количество
объектов для пеленгования, штормовые
условия или плохая видимость. Учитывая
эти обстоятельства, штурман должен
владеть различными комбинированными
способами определения места судна
условиях морского плавания можно
предположить создание условий, когда
измерение двух навигационных параметров
затруднительно. К таким условиям
можно отнести выход из строя РЛС или
гирокомпаса, невозможность пеленгования
из-за закрытия объектов надстройкой
или палубным грузом, малое количество
объектов для пеленгования, штормовые
условия или плохая видимость. Учитывая
эти обстоятельства, штурман должен
владеть различными комбинированными
способами определения места судна
1. Определение по пеленгу и горизонтальному углу. Если предположить, что один из двух предметов закрыт для обзора, то, измерив пеленг одного предмета, можно секстаном измерить горизонтальный угол с другой точки на судне. Для получения места на карте прокладываем ИП предмета А (рис. 12.1) и затем пеленг предмета В, рассчитанный по формуле ИПВ = ИПА + α.
Метод сводится к определению места по двум пеленгам.
Е сли
необходимо, то наблюдения следует
привести к одному моменту. Хотя
измерение угла секстаном дает высокую
точность, из-за неизбежных графических
ошибок при прокладке этот способ можно
считать для хорошей погоды приблизительно
равноценным способу двух пеленгов. Если
в пеленге большие случайные ошибки, то
место судна, определенное по пеленгу и
углу, оказывается более точным, особенно
при малых углах между ориентирами, так
как в этом случае угол между линиями
положения будет близок к 90°. В частном
случае вместо пеленга может быть створ.
сли
необходимо, то наблюдения следует
привести к одному моменту. Хотя
измерение угла секстаном дает высокую
точность, из-за неизбежных графических
ошибок при прокладке этот способ можно
считать для хорошей погоды приблизительно
равноценным способу двух пеленгов. Если
в пеленге большие случайные ошибки, то
место судна, определенное по пеленгу и
углу, оказывается более точным, особенно
при малых углах между ориентирами, так
как в этом случае угол между линиями
положения будет близок к 90°. В частном
случае вместо пеленга может быть створ.
Для оценки точности данного способа может быть применена формула
![]()
2. Определение по пеленгу и высоте светила. Если в момент взятия пеленга или радиопеленга измерить высоту светила, то место судна определяется в точке пересечения круга равных высот и линии пеленга. На практике круг равных высот заменяют высотной линией положения. Угол пересечения линий положения будет равен углу между пеленгом и направлением линии положения. Средняя квадратичная погрешность обсервованного места может быть вычислена по формуле
![]()
где mh — средняя квадратичная ошибка измерения высоты, утл. мин.
3. Определение по расстоянию и горизонтальному углу.
В тех случаях, когда в видимости имеются два объекта, но есть сомнение в поправке компаса, можно применить способ определения по расстоянию и горизонтальному углу. Этот способ позволяет не только определить место, но и проверить правильность поправки компаса. Может использоваться при длительных стоянках на рейде при выключенном гирокомпасе. Измерив горизонтальный угол с помощью секстана или как разность двух КП, определим расстояние до одного ориентира (по вертикальному углу или с помощью РЛС). Обсервованное место судна найдется в точке пересечения окружностей — изолиний горизонтального угла и расстояния. Если затем снять с карты ИП на предметы и сравнить их с компасными, можно проверить поправку гирокомпаса. Среднюю квадратичную ошибку обсервованного места получим по формуле

Для повышения точности следует расстояние измерять до более близкого объекта, так как в этом случае угол пересечения линий положения будет больше.
4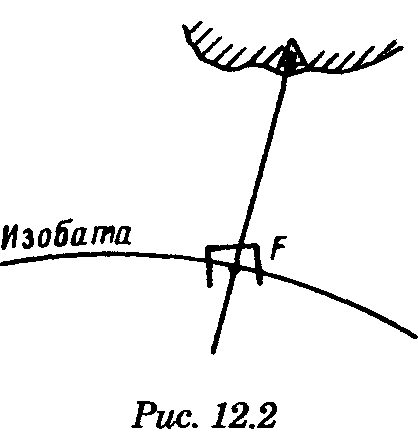 .
Опознание места по изолинии пеленга
или расстояния и глубине.
Если в какой-то момент получения линии
положения по наблюдению береговых
ориентиров измерена глубина, то место
судна можно получить как точку пересечения
полученной линии положения и
соответствующей изобаты (рис. 12.2). Таким
образом, место судна можно считать на
пеленге, где глубина соответствует
измеренной. Точность такого определения
зависит от рельефа дна и будет тем выше,
чем равномернее и ближе друг к другу
проходят изобаты в районе пеленга. В
морях с приливами должна быть учтена
высота прилива и измеренная глубина
приведена к нулю глубины, от которого
отмечаются глубины на карте.
.
Опознание места по изолинии пеленга
или расстояния и глубине.
Если в какой-то момент получения линии
положения по наблюдению береговых
ориентиров измерена глубина, то место
судна можно получить как точку пересечения
полученной линии положения и
соответствующей изобаты (рис. 12.2). Таким
образом, место судна можно считать на
пеленге, где глубина соответствует
измеренной. Точность такого определения
зависит от рельефа дна и будет тем выше,
чем равномернее и ближе друг к другу
проходят изобаты в районе пеленга. В
морях с приливами должна быть учтена
высота прилива и измеренная глубина
приведена к нулю глубины, от которого
отмечаются глубины на карте.
Если линия курса проходит через отличительную глубину или безопасную банку, то пеленг или расстояние следует измерить в момент прохождения этой отличительной глубины, отмеченной эхолотом.
Место судна, найденное таким способом, следует считать приближенным.