

Вопрос №15.
Теоретические основы применения Спутниковых навигационных систем для определения места судна. Основные закономерности движения ИСЗ. Орбиты ИЗС и их особенности. Методы определения навигационных параметров и расчета координат. Спутниковые системы GPS и GLONASS. Дифференциальные методы использования спутниковых систем. Точность. Достоинства и недостатки современных CНС.
Основные закономерности движения ИСЗ
Для движения ИСЗ по орбите необходимо, чтобы сила земного притяжения была скомпенсирована центробежной силой, возникающей при движении тела вокруг Земли. Это условие приводит к равенству

![]()
Скорость, при которой начинается движение ИСЗ по окружности вокруг Земли, называется круговой или первой космической скоростью. При H = 0 она равна V1 = V2 = 7,91 км/с.
Период обращения спутника, т. е. время одного его оборота вокруг Земли по круговой орбите радиуса р0,
![]()
З начения
V1
и Т для круговых орбит с разной высотой
Н показаны в табл. 16.1.
начения
V1
и Т для круговых орбит с разной высотой
Н показаны в табл. 16.1.
ИСЗ спутниковых РНС, нашедших применение на судах морского флота, двигаются по орбитам с высотой порядка 1000 км (в РНС «Цикада» — 1090... 1100 км).
Большое значение для практического использования имеют спутники с таким периодом обращения Т, при котором они за время звездных суток делают целое число оборотов вокруг Земли. Эти спутники называются периодическими или синхронными. Они пролетают над заданными районами Земли ежедневно в одно и то же время.
С инхронный
спутник на орбите с высотой Н = 35 870 км
имеет Т = 24 ч (точнее — 23 ч 56 мин 4с — одни
звездные сутки) и называется суточным.
Такие спутники нашли применение в
системах связи и телевидения.
инхронный
спутник на орбите с высотой Н = 35 870 км
имеет Т = 24 ч (точнее — 23 ч 56 мин 4с — одни
звездные сутки) и называется суточным.
Такие спутники нашли применение в
системах связи и телевидения.
Однако ИСЗ двигаются по круговой орбите только в частном случае. В общем случае орбита ИСЗ является эллиптической, имеющей большую а и малую b полуоси. Ближайшая к центру Земли точка орбиты называется перигеем П (на рис.16.1), наиболее удаленная — апогеем А.
Эллиптическую орбиту характеризуют 6 элементов Кеплера:
-наклонние i плоскости орбиты плоскости экватора;
-прямое восхождение Ω восходящего узла орбиты;
-угловое расстояние ω перигея от восходящего узла орбиты N1,
-время г прохождения спутника через перигеи или восходящий узел.
Первые пять элементов характеризуют пространственное положение орбиты ИСЗ и направление его движения, шестой — положение спутника на орбите.
Для определения места судна необходимо знать координаты спутника в момент наблюдений. Исходными величинами для расчетов являются приведенные выше параметры орбиты.
Реальная орбита спутника отличается от кеплеровской, во-первых, из-за того, что реальная форма Земли (геоид) отлична от шара, и, во-вторых, из-за влияния на спутник различных возмущающих сил, таких как сопротивление земной атмосферы, притяжение Луны и Солнца, давление солнечной радиации, взаимодействие спутника с магнитным полем Земли. Поэтому кеплеровские элементы непрерывно меняются, что необходимо учитывать при расчете места ИСЗ. В связи с этим всем судам, использующим ИСЗ для определения места, должны сообщаться не только начальные параметры Кеплера, соответствующие какому-то моменту времени, но и периодически обновляемые поправки к ним. Все эти данные получили общее название орбитальной информации. В действующих спутниковых РНС орбитальная информация считывается из запоминающего устройства спутника и используется для фазовой манипуляции несущих частот, на которых передаются сигналы от спутника.
Время существования спутника зависит от высоты орбиты, массы, размеров спутника, в частности от диаметра его поперечного сечения.
Например, спутник радионавигационной системы «Транзит» (масса 170 кг, Н = 1075 км) может существовать несколько десятков лет.
Орбиты ИСЗ и их особенности
Орбитой спутника называется траектория его движения относительно центра Земли. Плоскость орбиты всегда проходит через центр Земли.
Особенности и методы использования ИСЗ для целей навигации и связи в значительной степени зависят от того, на какую орбиту они запущены.
О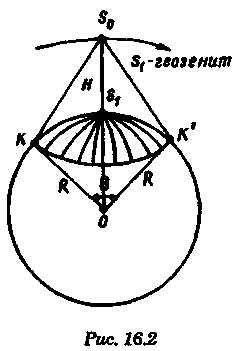 рбиты
ИСЗ классифицируются пo
двум признакам:
в зависимости от наклонения
i
плоскости орбиты относительно плоскости
экватора и в зависимости от высоты
H
орбиты над земной поверхностью. По
первому признаку орбиты подразделяются
на
рбиты
ИСЗ классифицируются пo
двум признакам:
в зависимости от наклонения
i
плоскости орбиты относительно плоскости
экватора и в зависимости от высоты
H
орбиты над земной поверхностью. По
первому признаку орбиты подразделяются
на
экваториальные (i = 0° или 180°),
полярные (i = 90°)
и наклонные (0° < i < 90°; 90° < i < 180°);
по второму — на
низкие (H < 5000 км),
средние (5000 < H < 22 000 км),
высокие (H > 22 000 км).
Среди последних выделяются синхронные орбиты с H = 35 870 км. Синхронный суточный спутник, выведенный на экваториальную орбиту, будет неподвижно «висеть» над определенной точкой земной поверхности. Такой спутник получил название стационарного. Если i ≠ 0, то синхронный И3C будет периодически смещаться в меридиональном направлении, захватывая северную и южную полярные области (квазистационарный ИСЗ).
Малый круг, в пределах которого могут приниматься радиосигналы спутника S0, называется зоной радиовидимости (рис.16.2). Сферический диаметр Θ этой зоны определяется по формуле
![]()
Д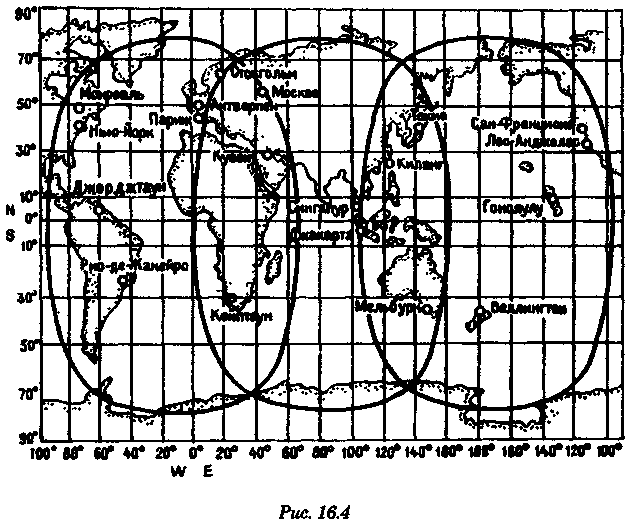
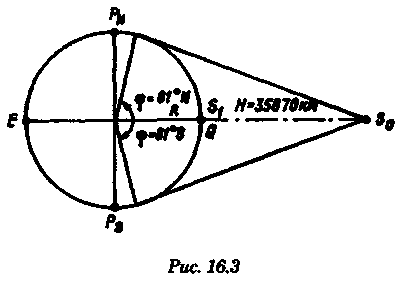 ля
стационарного ИСЗ при H
= 35 870 км; R
= 6371 км диаметр зоны видимости Θ
≈ 162°. Это означает, что стационарный
ИСЗ будет теоретически видим в
Северном и Южном полушариях до широты
φ = 81° N (S)
(рис. 16.3). Для надежного приема сигналов
необходимо, чтобы ИСЗ имели высоту
не менее 10° над горизонтом. Это требование
вызвано тем, что при малой высоте спутника
будут наблюдаться высокий уровень
помех и большое затухание радиоволн в
атмосфере. Поэтому границы зоны
радиовидимости несколько сужаются
(до φ
= 71°). На рис. 16.4 показаны области, в
пределах которых наблюдатель «видит»
спутник с h
> 10° над горизонтом.
ля
стационарного ИСЗ при H
= 35 870 км; R
= 6371 км диаметр зоны видимости Θ
≈ 162°. Это означает, что стационарный
ИСЗ будет теоретически видим в
Северном и Южном полушариях до широты
φ = 81° N (S)
(рис. 16.3). Для надежного приема сигналов
необходимо, чтобы ИСЗ имели высоту
не менее 10° над горизонтом. Это требование
вызвано тем, что при малой высоте спутника
будут наблюдаться высокий уровень
помех и большое затухание радиоволн в
атмосфере. Поэтому границы зоны
радиовидимости несколько сужаются
(до φ
= 71°). На рис. 16.4 показаны области, в
пределах которых наблюдатель «видит»
спутник с h
> 10° над горизонтом.
Стационарные ИСЗ пока не нашли применения в навигации, но широко используются для связи и телевидения. Например, для обеспечения глобальной радиосвязи на стационарную орбиту выводят три ИСЗ [международная система связи INMARSAT (см. рис. 16.4), применяющаяся с 1982 г. на судах морского флота].
Для низкоорбитального ИСЗ (H = 1000 км; R = 6371 км) по формуле (16.5) получаем диаметр зоны видимости
Θ ≈ 60,5° = 3630 миль.
При условии наблюдения спутника на высоте более 10°, что необходимо для более точного определения места, получаем диаметр зоны видимости
Θ ≈ 50° = 3000 миль.
Ш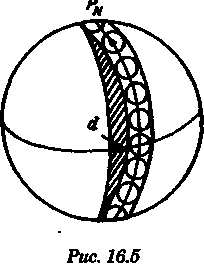 ирина
Атлантического океана в наиболее широкой
его части около 3000 миль, поэтому один
спутник на полярной орбите, пролетая
над серединой океана, может наблюдаться
во всех его точках.
ирина
Атлантического океана в наиболее широкой
его части около 3000 миль, поэтому один
спутник на полярной орбите, пролетая
над серединой океана, может наблюдаться
во всех его точках.
Так как спутник движется, то будет перемещаться и зона видимости, образуя на поверхности Земли полосу видимости. Полоса видимости для ИСЗ на полярной орбите для одного витка показана схематично на рис. 16.5.
Из-за вращения Земли полоса видимости, соответствующая каждому последующему витку, будет смещаться к западу на расстояние d (в милях):
![]()
Для спутника на полярной орбите, имеющего Н = 1000 км и Т = 106 мин, получаем величину смещения полосы видимости, равную на широте φ = 0° d = 1575 миль, φ = 30° d = 1362 мили, φ = 60° d = 788 миль.
Из этого видно, что смещение d полосы видимости к W меньше ширины полосы Θ. Поэтому на каждом последующем витке будет иметь место перекрытие полосы видимости. Это перекрытие, если выражать его в процентах
![]()
для нашего примера равно: для φ = 0° - 57%, φ = 60° - 78%, φ=90° -100%. Отсюда следует, что один и тот же спутник на полярной орбите может наблюдаться в одном и том же месте несколько раз подряд, например в средних широтах, по крайней мере, два раза. Это означает, что по одному и тому же спутнику в средних широтах можно определить место четыре раза в сутки: два раза подряд с интервалом, равным периоду обращения спутника, и затем через 10...12 ч еще два раза подряд, когда Земля, вращаясь с запада на восток, переместит наблюдателя под вторую половину орбиты спутника.
Изложенное показывает, что один низкоорбитальный спутник одновременно может наблюдаться только в ограниченном районе Земли. В процессе движения ИСЗ сделает несколько оборотов вокруг Земли и при i = 90° будет наблюдаться во всех ее точках. При i < 90° след (трасса) ИСЗ на земной поверхности будет доходить до φ = i.
При H = 1000 км суточное число оборотов ИСЗ
![]()
Следовательно, один ИСЗ на полярной орбите может в течение суток обеспечить определение места во всех точках Земли, но таких обсерваций будет мало и они будут редки. Минимальное число ИСЗ для определения места с требуемой дискретностью Гтреб может быть определено по формуле
![]()
где ∆λmin — минимальная разность долгот на данной параллели, охватываемая полосой видимости спутника за один его виток.
Например, для спутников на полярной орбите, имеющих Н = 1000 км и Т = 106 мин, для определения места в районе экватора (∆λmin = Θ = 50°) с дискретностью Гтреб = Т получаем,
![]()
т. е. заданная дискретность обеспечивается 4 спутниками. Для дискретности Гтреб = 60 мин требуется
![]()
Для обеспечения возможности непрерывного определения места судна в любое время суток и в любом месте Земли необходимо применить синхронно вращающиеся спутники, причем число их должно быть значительным.
Применение же независимо вращающихся спутников может обеспечить лишь дискретные определения места судна. Увеличение числа ИСЗ не устранит этого недостатка. Поэтому система с ограниченным числом низкоорбитальных ИСЗ может быть лишь средством дискретной навигации.
Большое значение для использования ИСЗ имеет продолжительность его наблюдения. Очевидно, она будет определяться временем прохождения зоны видимости через место наблюдателя. Для неподвижного наблюдателя, находящегося в плоскости орбиты ИСЗ, будет иметь место максимальная продолжительность наблюдения спутника, определяемая выражением
![]()
г![]() де
Т3, Тв — время захода и восхода спутника
соответственно. Например, для
низкоорбитального спутника (H
= 1000 км) получим На практике это время
не более 16 мин.
де
Т3, Тв — время захода и восхода спутника
соответственно. Например, для
низкоорбитального спутника (H
= 1000 км) получим На практике это время
не более 16 мин.
П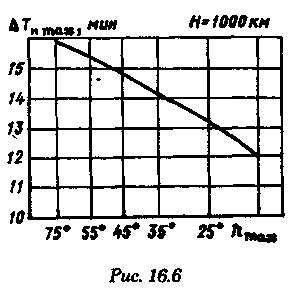 еремещение
наблюдателя на таких сравнительно
тихоходных объектах, как суда, не будет
существенно влиять на продолжительность
наблюдения спутника.
еремещение
наблюдателя на таких сравнительно
тихоходных объектах, как суда, не будет
существенно влиять на продолжительность
наблюдения спутника.
Если наблюдатель находится на некотором расстоянии а от трассы ИСЗ, то продолжительность его наблюдения будет меньше. Расстояние а при заданной Н определяет максимальную угловую высоту hmax спутника (высоту кульминации), на которой он наблюдается в момент кульминации.
Поэтому продолжительность наблюдения ИСЗ ТHmax можно определить в зависимости от hmax. График такой зависимости приведен на рис. 16.6. Общее время наблюдения ИСЗ составляет примерно 16 мин, hmax > 75°, причем при углах hmax > 20° он наблюдается в течение 12 мин.
Методы определения места судна с помощью навигационных спутников
Искусственный спутник Земли можно представлять как навигационный ориентир, поднятый на высоту нескольких сотен и даже тысяч километров над поверхностью Земли. Двигаясь по законам всемирного тяготения по заранее рассчитанной орбите и излучая радиосигналы, он является навигационным ИСЗ — космическим радиомаяком. Принципиальной основой, использования ИСЗ в качестве опорных ориентиров является закономерный характер их движения вокруг Земли. Для определения места по ИСЗ применяются следующие методы: дальномерный, радиально-скоростной и разностно-дальномерный.
Д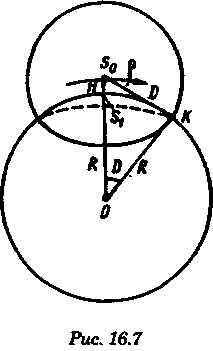 альномерный
метод.
альномерный
метод.
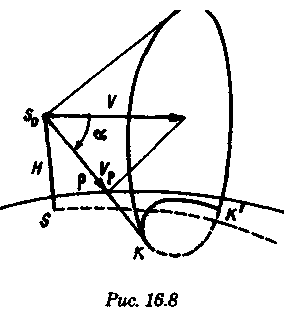
В этом методе навигационным параметром является наклонная (топоцентрическая) дальность р до спутника (рис. 16.7). Ей соответствует изоповерхность в виде сферы с центром, совпадающим с ИСЗ, и радиусом, равным измеренной дальности.
При пересечении сферической изоповерхности с поверхностью Земли получим изолинию, соответствующую измеренной дальности до спутника, — окружность сферического радиуса D. Его можно получить из ∆S0ОК:
Из выражения (16.9) видим, что для определения изолинии с наибольшей точностью надо наблюдать ИСЗ, имеющие малые высоты.
Для определения места необходимо иметь несколько изолиний. Их можно получить, выполнив наблюдения нескольких ИСЗ или повторные наблюдения одного и того же низкоорбитального ИСЗ через небольшие промежутки времени.
Топоцентрическая дальность может быть измерена пассивным или активным методом. Пассивный метод состоит в определении р по времени t распространения радиосигнала от спутника до приемника:
![]()
часов спутника и приемника. Для измерения дальности р пассивным методом с высокой точностью на спутнике и на судне должны быть высокостабильные генераторы частоты. Например, для определения дальности р с точностью до 0,3 м кратковременная нестабильность генераторов частоты должна быть не хуже 10-9.
Активный метод измерения дальности до спутника аналогичен методу измерения расстояния до активного радиолокационного отражателя
![]()
Этот метод не требует наличия высокостабильных генераторов частоты на судне. Но при его использовании возникает другая проблема — обеспечение одновременного обслуживания сотен и тысяч потребителей.
Дальномерный пассивный метод применяется во вводимой в настоящее время спутниковой РНС на средневысоких орбитах.