

Вопрос №16.
Использования РЛС и САРП в навигации. Принцип действия, эксплуатационные и точностные характеристики, ограничения. Основы чтения радиолокационного изображения. Определение места, непрерывный контроль над положением судна при плавании в узкостях, точность обсерваций. Параллельные индексы.
Виды индикаций изображения на экране РЛС и особенности их использования
Радиолокационнная станция позволяет не только определять место судна, но и, что самое главное, видеть объекты, скрытые от визуального наблюдения.
Радиолокационная станция предназначена для обнаружения надводных объектов и берега в условиях плохой видимости, определения места судна, обеспечения плавания в узкостях, предупреждения столкновения судов. Кроме того, РЛС может применяться для определения маневренных элементов судна и обнаружения опасных метеорологических явлений (тайфунов, шквалов, снежных зарядов и т. п.).
В судовых РЛС в качестве индикатора применяется электроннолучевая трубка (ЭЛТ) с круговым обзором. Индикатор кругового обзора (ИКО) дает изображение окружающей надводной обстановки и позволяет определять расстояния до объектов и направления на них.
Изображение окружающей надводной обстановки на ИКО может иметь различный вид и различную ориентировку. На морских судах применяются ИКО с двумя видами изображения обстановки: в относительном движении (ОД); в истинном движении (ИД).
П ри
изображении обстановки в ОД
место своего судна на ИКО (начало
развертки) неподвижно, эхо-сигналы
неподвижных объектов (островов, берегов,
буев и т. п.) перемещаются на экране в
сторону, обратную движению судна, со
скоростью, равной скорости судна в
масштабе экрана (рис. 17.1,а). Эхо-сигналы
подвижных объектов перемещаются по
линиям относительного движения (ЛОД)
с относительной скоростью, являющейся
результатом геометрического вычитания
скорости судна-наблюдателя из скорости
подвижных объектов.
Этот вид изображения обстановки удобно
применять для решения задач на расхождение
с другими судами.
Недостатком этого вида изображения
является нечеткость изображения
береговых объектов из-за наложения их
эхо-сигналов друг на друга при движении
судна («размазывание» за счет послесвечения
ЭЛТ).
ри
изображении обстановки в ОД
место своего судна на ИКО (начало
развертки) неподвижно, эхо-сигналы
неподвижных объектов (островов, берегов,
буев и т. п.) перемещаются на экране в
сторону, обратную движению судна, со
скоростью, равной скорости судна в
масштабе экрана (рис. 17.1,а). Эхо-сигналы
подвижных объектов перемещаются по
линиям относительного движения (ЛОД)
с относительной скоростью, являющейся
результатом геометрического вычитания
скорости судна-наблюдателя из скорости
подвижных объектов.
Этот вид изображения обстановки удобно
применять для решения задач на расхождение
с другими судами.
Недостатком этого вида изображения
является нечеткость изображения
береговых объектов из-за наложения их
эхо-сигналов друг на друга при движении
судна («размазывание» за счет послесвечения
ЭЛТ).
П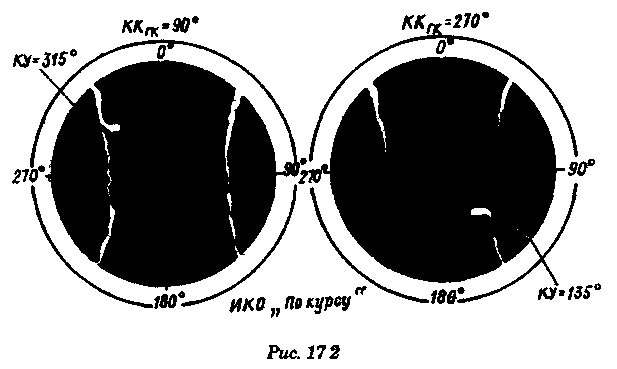 ри
изображении обстановки в ИД
место своего судна на ИКО (начало
развертки) перемещается по экрану в
направлении и со скоростью, которые
соответствуют движению своего судна.
В это же время эхо-сигналы неподвижных
объектов на экране остаются на месте,
а подвижных — перемещаются в направлениях,
соответствующих их ИК, оставляя за
собой следы — линии истинного движения
(ЛИД)
(рис. 17.1,b).
Это достигается тем, что к относительным
скоростям движущихся объектов прибавляется
скорость судна-наблюдателя. Данные о
курсе и скорости своего судна вводятся
в вычислительное устройство автоматически
от гирокомпаса и лага или устанавливаются
вручную. Возврат всего изображения и
начала развертки в исходную точку, когда
оно доходит до края ИКО или до определенного
заданного положения (обычно не более
2/3 расстояния от центра экрана), может
осуществляться как вручную, так и
автоматически. В режиме ИД пеленги и
расстояния измеряют с помощью
электронного визира. Этот
вид изображения обстановки удобно
применять при плавании в узкостях и
стесненных водах.
При этом исключается «размазывание»
изображения неподвижных объектов.
Однако решение задачи на расхождение
с другими судами в ИД выполнять неудобно.
Во-первых, послесвечение обычных ЭЛТ
невелико, поэтому след эхо-сигналов
встречных судов виден только при
достаточно быстром перемещении.
Установить по этим следам курсы судов
можно только приблизительно, а скорости
невозможно. Во-вторых, ИД не позволяет
быстро и достаточно точно определить
степень риска столкновения, оцениваемую
с помощью главных обстоятельств встречи:
дистанции кратчайшего сближения Dкp
и времени Ткp
сближения на эту дистанцию.
ри
изображении обстановки в ИД
место своего судна на ИКО (начало
развертки) перемещается по экрану в
направлении и со скоростью, которые
соответствуют движению своего судна.
В это же время эхо-сигналы неподвижных
объектов на экране остаются на месте,
а подвижных — перемещаются в направлениях,
соответствующих их ИК, оставляя за
собой следы — линии истинного движения
(ЛИД)
(рис. 17.1,b).
Это достигается тем, что к относительным
скоростям движущихся объектов прибавляется
скорость судна-наблюдателя. Данные о
курсе и скорости своего судна вводятся
в вычислительное устройство автоматически
от гирокомпаса и лага или устанавливаются
вручную. Возврат всего изображения и
начала развертки в исходную точку, когда
оно доходит до края ИКО или до определенного
заданного положения (обычно не более
2/3 расстояния от центра экрана), может
осуществляться как вручную, так и
автоматически. В режиме ИД пеленги и
расстояния измеряют с помощью
электронного визира. Этот
вид изображения обстановки удобно
применять при плавании в узкостях и
стесненных водах.
При этом исключается «размазывание»
изображения неподвижных объектов.
Однако решение задачи на расхождение
с другими судами в ИД выполнять неудобно.
Во-первых, послесвечение обычных ЭЛТ
невелико, поэтому след эхо-сигналов
встречных судов виден только при
достаточно быстром перемещении.
Установить по этим следам курсы судов
можно только приблизительно, а скорости
невозможно. Во-вторых, ИД не позволяет
быстро и достаточно точно определить
степень риска столкновения, оцениваемую
с помощью главных обстоятельств встречи:
дистанции кратчайшего сближения Dкp
и времени Ткp
сближения на эту дистанцию.
Изображение на ИКО может быть ориентировано: относительно диаметральной плоскости (ДП) судна («по курсу»); относительно гирокомпасного меридиана («по норду»).
При ориентировке изображения «по курсу» на ИКО видна такая же картина взаимного расположения объектов относительно ДП судна, как и при непосредственном визуальном наблюдении (рис. 17.2,а). При этом отметка курса совпадает с направлением ДП судна и проходит через ноль азимутального круга. По этой шкале отсчитывают курсовые углы на объекты.
При повороте судна отметка курса остается неподвижной, а изображение на ИКО смещается в сторону, обратную стороне поворота, на угол отворота (рис. 17.2,b). Этот вид ориентировки целесообразно применять при плавании в узкостях и при использовании РЛС для предупреждения столкновения судов. Следует иметь в виду, что при ориентировке «по курсу» рыскание судна приводит к смещениям изображения, а это неизбежно ухудшает его четкость, и его называют нестабилизированным. Применяется оно только для режима ОД.
П ри
ориентировке изображения «по
норду» на
ИКО видна картина, похожая на
изображение местности на морской карте.
При этом ноль азимутального круга
совпадает с направлением гирокомпасного
меридиана По этой шкале отсчитываются
пеленги на объекты и курс судна (рис.17.3).
При повороте судна изображение на ИКО
остается неподвижным, а отметка курса
перемещается в сторону поворота на
угол поворота Таким образом, при поворотах
и рыскании судна изображение будет
сохранять свою стабильность, поэтому
его называют стабилизированным.
ри
ориентировке изображения «по
норду» на
ИКО видна картина, похожая на
изображение местности на морской карте.
При этом ноль азимутального круга
совпадает с направлением гирокомпасного
меридиана По этой шкале отсчитываются
пеленги на объекты и курс судна (рис.17.3).
При повороте судна изображение на ИКО
остается неподвижным, а отметка курса
перемещается в сторону поворота на
угол поворота Таким образом, при поворотах
и рыскании судна изображение будет
сохранять свою стабильность, поэтому
его называют стабилизированным.
Ориентировку «по норду» целесообразно применять для определения места судна Следует иметь в виду, что этот вид ориентировки применяется для режимов относительного и истинного движения.
Недостаток ориентировки «по норду» — рассогласование в ориентировке картины на ИКО с наблюдаемой визуально с мостика судна, при которой нулем отсчета служит ДП судна Это особенно сказывается при плавании в стесненных водах курсами, близкими к 180°, когда отметка курса направлена вниз экрана
В некоторых современных РЛС применяется дополнительно третий вид ориентировки, называемый «курс стабилизированный». При этой ориентировке отметка курса совпадает с направлением ДП судна и проходит через ноль азимутального круга Но при небольших изменениях курса, вызванных рысканием, или поворотах отметка курса соответственно изменяет свое положение, а изображение на ИКО остается неподвижным. Благодаря этому изменение курса судна не приводит к «смазыванию» изображения, т. е. устраняется недостаток, свойственный ориентировке «по курсу». Этот вид ориентировки рекомендуется применять при плавании в узкостях и вдоль берегов в условиях сильного волнения и для решения задач на расхождение с другими судами.
Выбор правильного вида ориентировки имеет большое значение для безопасного плавания, особенно в узкостях. Примером неправильного выбора и применения ориентировки ИКО, являющихся непосредственной причиной аварии, может быть случай, произошедший в 1964 г.
С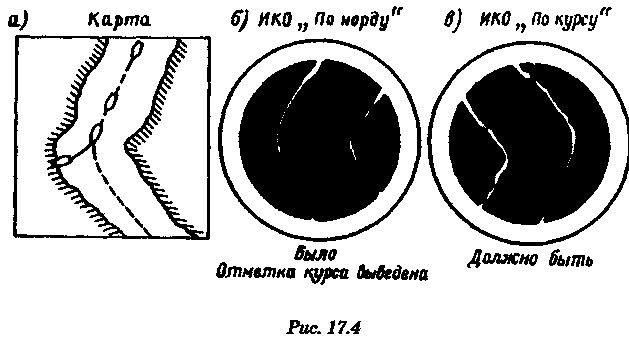 удно
вошло в пролив Босфор с севера, при этом
судоводители оставили ориентировку
ИКО «по норду» (рис. 17.4,а, б). Отметка
курса была выведена (пунктирная линия
на рис. 17.4,6). Видимость вначале была
хорошей, и проводка судна осуществлялась
лоцманским методом. Однако когда судно
подошло к месту поворота (см. рис. 17.4,
о), видимость резко ухудшилась и судно
оказалось в полосе тумана Лоцман подошел
к ИКО, увидел изображение, показанное
на рис. 17.4Д и, не зная, что экран ориентирован
«по норду», а отметка курса выведена,
дал команду о повороте вправо, что и
привело к посадке судна на мель.
удно
вошло в пролив Босфор с севера, при этом
судоводители оставили ориентировку
ИКО «по норду» (рис. 17.4,а, б). Отметка
курса была выведена (пунктирная линия
на рис. 17.4,6). Видимость вначале была
хорошей, и проводка судна осуществлялась
лоцманским методом. Однако когда судно
подошло к месту поворота (см. рис. 17.4,
о), видимость резко ухудшилась и судно
оказалось в полосе тумана Лоцман подошел
к ИКО, увидел изображение, показанное
на рис. 17.4Д и, не зная, что экран ориентирован
«по норду», а отметка курса выведена,
дал команду о повороте вправо, что и
привело к посадке судна на мель.
Очевидно, что в данной ситуации (узкость, судно следовало в южном направлении) ориентировку ИКО следовало бы иметь «по курсу» (рис. 17.4, в).
Масштаб изображения обстановки на экране РЛС можно изменять переключением ИКО на соответствующую шкалу дальности. Так как на одном и том же экране при меньшей шкале границе экрана будет соответствовать меньшее расстояние, то окружающие судно объекты, находящиеся в пределах данного расстояния, будут видны крупнее, т. е. масштаб будет больше. Выбор той или иной шкалы дальности зависит от условий плавания.
Изображение местности на экране весьма сходно с картой. Однако иногда опознание объектов наблюдений может быть затруднительным вследствие искажений. Судоводитель должен знать причины искажений и систематически тренироваться в расшифровке изображения местности на ИКО.
Основные эксплуатационные данные рлс
М аксимальная
дальность действия и дальность обнаружения
объектов. В современных РЛС применяются
радиоволны сантиметрового диапазона,
которые распространяются и отражаются
по законам световых волн с несколько
большим коэффициентом рефракции. Поэтому
они проникают немного дальше за видимый
горизонт, чем световые. Максимальная
дальность действия радиолокатора
определяется радиолокационным
горизонтом и может быть найдена по
формуле
аксимальная
дальность действия и дальность обнаружения
объектов. В современных РЛС применяются
радиоволны сантиметрового диапазона,
которые распространяются и отражаются
по законам световых волн с несколько
большим коэффициентом рефракции. Поэтому
они проникают немного дальше за видимый
горизонт, чем световые. Максимальная
дальность действия радиолокатора
определяется радиолокационным
горизонтом и может быть найдена по
формуле
Эта формула справедлива для стандартных условий атмосферы: давление 760 мм рт.ст., температура +15°С, градиент температуры 0,0065°/м, относительная влажность (постоянная с высотой) 60%.
Дальность радиолокационного горизонта примерно на 15% больше дальности видимого горизонта, вычисляемой по известной формуле
![]()
поэтому Др можно найти, если выбрать из табл. 22 МТ-75 и умножить ее на коэффициент 1,15.
Дальность обнаружения отдельных объектов с помощью РЛС может быть определена по формуле
![]()
Однако в некоторых случаях дальность радиолокационного обнаружения отдельных объектов будет меньше дальности, определяемой формулой (17.2), так как она зависит от отражающей способности этих объектов. Последняя определяется размерами, формой, положением объекта и строением его поверхности (гладкая или шероховатая). Например, высокий крутой каменистый берег будет обнаруживаться на большем расстоянии, чем низкий пологий; металлическое судно - дальше, чем деревянное тех же размеров, и т. д.
В туман, дождь, снегопад дальность радиолокационной видимости объектов может быть меньше, чем указано выше, так как часть электромагнитной энергии будет поглощаться частицами воды. При небольших дождях и снегопадах дальность снижается на 10%, при очень сильных (проливных) дождях, тропических ливнях она может уменьшиться на 30 и даже 50%. В связи с этим некоторые современные РЛС являются двухдиапазонными: при ясной атмосфере в них используется диапазон 3 см, при плохой видимости из-за тумана, дождя и т. п. —10 см.
При некоторых гидрометеорологических условиях может наблюдаться аномальное распространение радиолокационных сигналов, проявляющееся в значительном снижении дальности обнаружения объектов (субрефракция) или в значительном увеличении дальности (сверхрефракция).
Минимальная дальность действия и мертвая зона.
Минимальная дальность действия — это наименьшее расстояние, на котором объекты могут обнаруживаться. Она определяется в основном длительностью импульса т. Пока продолжается излучение энергии импульса, прием отраженных сигналов невозможен, так как антенна все это время подключена к передатчику.
Минимальная дальность действия приближенно равна ст/2. В действительности минимальная дальность действия несколько больше из-за инерционности антенного переключателя, переключающего антенну на передачу/прием, и невозможности выделить эхо-сигнал при близком расположении его к центру экрана. В общем случае она определяется по формуле

С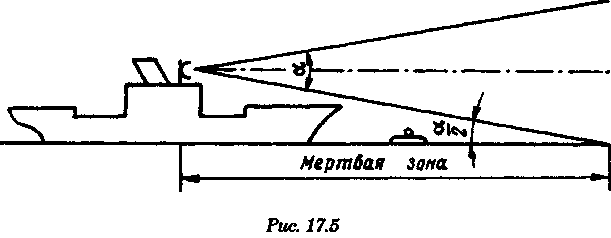 пособность
РЛС обнаруживать близкорасположенные
объекты характеризуется также мертвой
зоной. Ширина диаграммы направленности
антенны РЛС в вертикальной плоскости
обычно колеблется в пределах 15...30°,
поэтому объекты, находящиеся под нижней
кромкой угла излучения, не будут видимы
(рис. 17.5). Пространство ниже этой кромки
называется мертвой
зоной.
пособность
РЛС обнаруживать близкорасположенные
объекты характеризуется также мертвой
зоной. Ширина диаграммы направленности
антенны РЛС в вертикальной плоскости
обычно колеблется в пределах 15...30°,
поэтому объекты, находящиеся под нижней
кромкой угла излучения, не будут видимы
(рис. 17.5). Пространство ниже этой кромки
называется мертвой
зоной.
Теоретически при отсутствии крена и дифферента величина мёртвой зоны определяется радиусом окружности
![]()
где а — ширина диаграммы направленности в вертикальной плоскости.
Практически величина мертвой зовы может быть несколько другой, поэтому ее нужно определять экспериментально. Наиболее просто это можно сделать на якорной стоянке судна, используя в качестве надводного объекта шлюпку. Нужно учитывать также, что величина мертвой зоны меняется с изменением осадки, крена и дифферента.