

I. Ограждающее, или опасное, расстояние. Применяется для непрерывного контроля за положением судна относительно навигационных опасностей при плавании вблизи берегов и в узкостях.
Д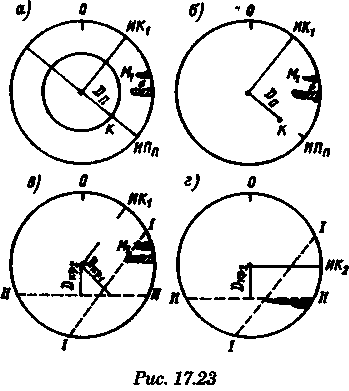 ля
заданного участка перехода устанавливают
такое значение расстояния Doп,
меньше которого до берега не должно
быть (рис. 17.20,а). Контроль за безопасным
плаванием осуществляется на ИКО РЛС с
помощью ПКД, который устанавливают на
Doп,
или сетки параллельных линий
механического визира, установленного
параллельно линии ИК. Судоводитель
должен следить на ИКО за тем, чтобы между
ПКД или параллельной линией визира (на
рис. 17.20,6, линия ab)
и эхо-сигналом берега был зазор (в этом
случае D
> Don).
При плавании серединой узкостей (рис.
17.21,а) круг радиусом Don
должен чисто проходить мимо эхо-сигналов
берегов (рис. 17.21,6). Если на судне
установлены современные САРП, в которых
имеются электронные ограждающие изолинии
(например, в САРП «Диджип-лот» NAV—LINE),
то можно их применить путем вывода на
экран и установки параллельно линии ИК
на Dоп
(пунктирные линии на рис. 17.20,в, ирис.
17.21,в).
ля
заданного участка перехода устанавливают
такое значение расстояния Doп,
меньше которого до берега не должно
быть (рис. 17.20,а). Контроль за безопасным
плаванием осуществляется на ИКО РЛС с
помощью ПКД, который устанавливают на
Doп,
или сетки параллельных линий
механического визира, установленного
параллельно линии ИК. Судоводитель
должен следить на ИКО за тем, чтобы между
ПКД или параллельной линией визира (на
рис. 17.20,6, линия ab)
и эхо-сигналом берега был зазор (в этом
случае D
> Don).
При плавании серединой узкостей (рис.
17.21,а) круг радиусом Don
должен чисто проходить мимо эхо-сигналов
берегов (рис. 17.21,6). Если на судне
установлены современные САРП, в которых
имеются электронные ограждающие изолинии
(например, в САРП «Диджип-лот» NAV—LINE),
то можно их применить путем вывода на
экран и установки параллельно линии ИК
на Dоп
(пунктирные линии на рис. 17.20,в, ирис.
17.21,в).
II. Контроль поворота Для этого применяются контрольные пеленги и расстояния. Пусть, например, судну нужно повернуть в точке В с ИК1 на ИК2 (рис. 17.22). На ИК1 кратчайшее расстояние до мыса М — Dкр1 на ИК2 — Dкр2. Для контроля поворота можно использовать различные приемы в зависимости от технических возможностей РЛС.
1. Контроль
поворота с помощью ПКД и механического
в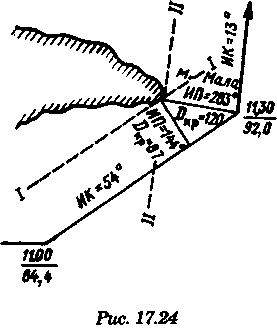 изира.
Устанавливают визир на ИПП поворота, а
ПКД на DП
поворота (рис. 17.23,а). Когда точка К
пересечения визира с окружностью
коснется эхо-сигнала мыса M1,
необходимо поворачивать на ИК2.
изира.
Устанавливают визир на ИПП поворота, а
ПКД на DП
поворота (рис. 17.23,а). Когда точка К
пересечения визира с окружностью
коснется эхо-сигнала мыса M1,
необходимо поворачивать на ИК2.
2. Контроль поворота с помощью электронного визира (рис 17.23,6). Устанавливаем электронный визир на ИПп и расстояние Dn. В момент касания конца визира (точка К) эхо-сигнала мыса M1 ложатся на ИК2.
3. Контроль поворота с помощью САРП (рис. 17.23, в). На экране САРП устанавливают электронные ограждающие изолинии /—/ и II — II на расстояниях Dкр1 и Dкр2 соответственно. При движении судна по ИК1 эхо-сигнал мыса М1 будет перемещаться по линии ИК1±180°. Когда он придет на электронную ограждающую изолинию II — II, необходимо ложиться на ИК2 (рис. 17.23,г).
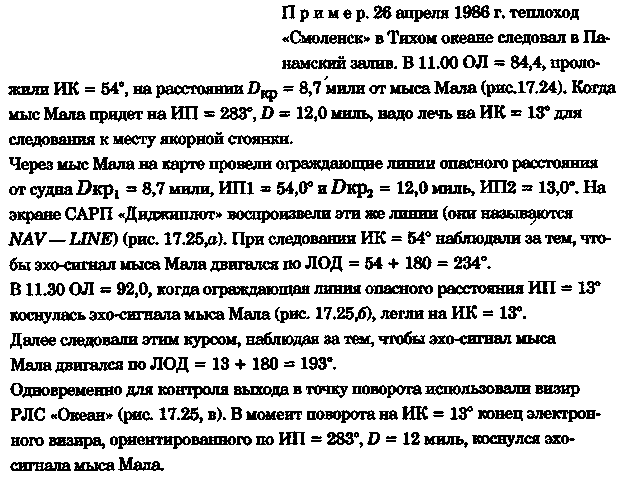
Контроль поворота с помощью САРП «Дидаеишют» покажем на примере.
Могут быть и другие примеры использования методов непрерывного контроля за движением судна Основное достоинство приведенных методов заключается в том, что их применение не требует ухода судоводителя с мостика в штурманскую рубку и, следовательно, не прерывается визуальное и радиолокационное наблюдение за окружающей обстановкой. Эти методы не заменяют традиционных, а должны разумно сочетаться с ними.
О бычные
определения места судна на карте должны
делаться с необходимой дискретностью.
Однако эти методы дополняют обычные
обсервации и дают быструю оперативную
и надежную информацию о том, что судно
находится в безопасности в интервалах
между обсервациями. Следует также
иметь в виду, что методы непрерывного
контроля требуют более тщательной и
глубокой, чем обычно, проработки
предстоящего перехода и подъема карты.
В частности необходимо подобрать
характерные ориентиры (маяки, островки,
скалы, остроконечные мысы и т. п.). Для
успешного плавания необходимо, чтобы
РЛС была исправна и выверена.
бычные
определения места судна на карте должны
делаться с необходимой дискретностью.
Однако эти методы дополняют обычные
обсервации и дают быструю оперативную
и надежную информацию о том, что судно
находится в безопасности в интервалах
между обсервациями. Следует также
иметь в виду, что методы непрерывного
контроля требуют более тщательной и
глубокой, чем обычно, проработки
предстоящего перехода и подъема карты.
В частности необходимо подобрать
характерные ориентиры (маяки, островки,
скалы, остроконечные мысы и т. п.). Для
успешного плавания необходимо, чтобы
РЛС была исправна и выверена.