Дифференциальные методы использования спутниковых систем.
Одним из возможных в будущем применений спутниковых РНС GPS и ГЛОНАСС может быть использование их для высокоточной проводки судов в каналах, которая в настоящее время выполняется с помощью береговых РЛС. Для этой цели, а также для обеспечения проведения геодезических работ потребуется установка на берегу контрольных ПИ системы и передатчиков для проведения коррекции измерений на судне в реальном масштабе времени. Такой метод использования СРНС GPS называется дифференциальным (DGPS). В дифференциальном режиме ожидается точность до 6 м в радиусе до 500 км от береговой станции.
Идея дифференциальных методов коррекции координат заключается в том, что приемная аппаратура спутниковых систем устанавливается, на так называемых, опорных (контрольных) станциях, координаты которых определены геодезически и точность привязки в данной системе координат значительно превышает точность определения места по навигационной системе.
Т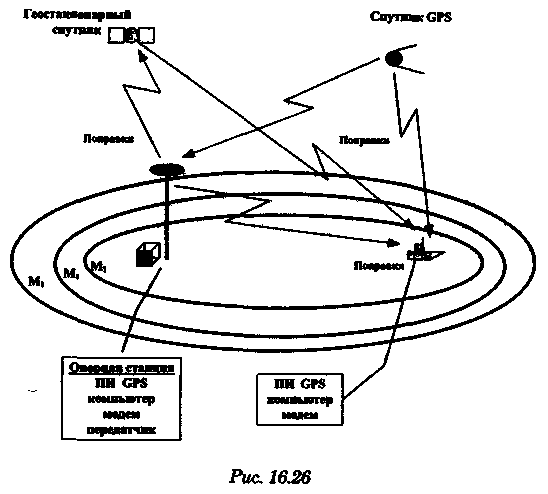 аким
образом, принимая измерительную
информацию, на станции появляется
возможность вычислять дифференциальные
поправки к координатам, или к
радионавигационным (навигационным)
параметрам.
аким
образом, принимая измерительную
информацию, на станции появляется
возможность вычислять дифференциальные
поправки к координатам, или к
радионавигационным (навигационным)
параметрам.
Эти поправки имеют свойство быть практически постоянными на некотором удалении от опорной станции, т. е. в некотором дифференциальном районе. Поправки радиотехническими методами передаются в приемную судовую аппаратуру для получения более точных координат, поэтому в судовых приемоиндикаторах имеется специальный дифференциальный блок. В системе DGPS принято рассчитывать поправки к псевдодальностям, так как неизвестно, какое созвездие спутников применяет пользователь системы для определения места судна.
Поправки можно использовать в двух режимах:
1. Для неподвижных объектов является несущественным использование дифференциальных поправок в реальном масштабе времени и они могут запоминаться и применятся в дальнейшем для обработки навигационной информации.
2. Для движущихся объектов, которыми являются суда, необходимо применение поправок в реальном масштабе времени.
Состав дифференциальной системы представлен на рис. 16.26.
Каналы связи могут быть наземные, например в частотном диапазоне радиомаяков, или через геостационарные спутники (ИНМАРСАТ).
Наибольшее распространение имеет сеть опорных станций, расположенных на уже действующих радиомаяках. Радиомаяки получают вторую жизнь, работая в режиме дифференциальной GPS или ГЛОНАСС. Частотный канал для передачи поправок обычно сдвинут на величину около 0,5 кгц относительно основной частоты. На размеры зоны оказывают влияние те же факторы, что и на дальность действия обычного радиомаяка в режиме пеленгования. Это очень важно для потребителей, так как дифференциальная зона «дышит» в зависимости от условий распространения электромагнитных волн, и на ее границах прием может оказаться неустойчивым. С удалением от опорной станции точность определения места падает, т. е. в соответствие с рисунком 6.26 М1 < М2 < М3, где M1 M2, М3 — средние квадрадические погрешности определения координат в соответствующих зонах.
Поправки передаются в формате RТСМ SC-104 (Radio Technical Co-mission for Marine Services). В сигналах опорных станций транслируются 16 видов данных, но непосредственно для навигации используются сообщения типа 1 с общей информацией, которая включает в себя:
1. Идентификатор опорной станции.
2. Расписание передачи информации.
3. Объем передаваемой информации.
4. Техническое состояние опорной станции.
Затем передаются поправки к псевдодальностям по каждому спутнику отдельно в фазовых циклах по следующей форме: