

Спутниковые системы gps и glonass.
Принцип действия. Недостатки спутниковых РНС доплеровского типа вызвали необходимость создания более совершенных спутниковых навигационных систем. Такие системы созданы на средневысоких орбитах и в настоящее время начинают использоваться на морских судах: GPS (США) и ГЛОНАСС (Россия). Принципы работы этих систем одинаковы. Рассмотрим их на примере РНС GPS. Спутниковая РНС GPS, разрабатываемая с 1975 г., предназначается для непрерывного определения места различных подвижных объектов в любой точке Земли или околоземного пространства в любое время суток в любую погоду.
Э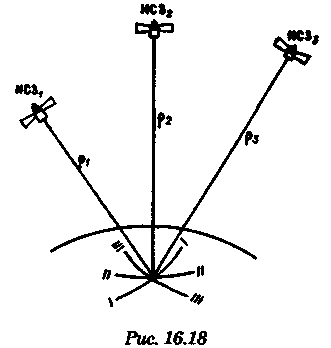 та
система после ее полного развертывания
должна состоять из 18
ИСЗ (плюс 3 запасных) на 6
орбитах —
по 3
равномерно расположенных ИСЗ на
каждой (рис 16.17). Орбиты почти круговые
высотой H
= 20200 км. Угол
наклона орбит i
= 55°. При
таком угле наклона плоскости орбит
пересекаются под прямым углом, образуя
на поверхности Земли 8 равных октантов.
Это обеспечивает единообразные зоны
точности по всей поверхности Земли.
Период обращения ИСЗ Т≈12ч.
Радиус зоны радиовидимости 76°.
В зоне радиовидимости наблюдателя
могут быть одновременно видны от 4
до 8 ИСЗ.
та
система после ее полного развертывания
должна состоять из 18
ИСЗ (плюс 3 запасных) на 6
орбитах —
по 3
равномерно расположенных ИСЗ на
каждой (рис 16.17). Орбиты почти круговые
высотой H
= 20200 км. Угол
наклона орбит i
= 55°. При
таком угле наклона плоскости орбит
пересекаются под прямым углом, образуя
на поверхности Земли 8 равных октантов.
Это обеспечивает единообразные зоны
точности по всей поверхности Земли.
Период обращения ИСЗ Т≈12ч.
Радиус зоны радиовидимости 76°.
В зоне радиовидимости наблюдателя
могут быть одновременно видны от 4
до 8 ИСЗ.
В спутниковой системе GPS используется дальномерный метод определения места объекта. Наклонное (топоцентрическое) расстояние р до спутника определяется пассивным методом (см. п. 16.3).
На спутниках применяются цезиевые стандарты частоты с нестабильностью 10-14 за сутки. Так как уход частоты судового опорного генератора, вызывающий расхождение временных шкал, неизвестен, то он должен определяться как дополнительное неизвестное время с координатами φ0, λ0.
Д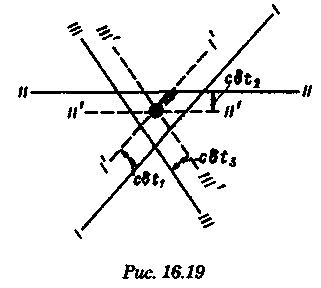 ля
определения места судна одновременно
принимают данные не
менее чем от трех ИСЗ (рис.
16.18). При пересечении трех изолиний
(окружностей) на поверхности Земли
получается треугольник погрешности
из-за присутствия в измеренных расстояниях
р
постоянных ошибок cδt
(рис. 16.19). Место судна находится в точке
пересечения биссектрис вершин треугольника
погрешности. Найдя место судна (φ0,
λ0) можно
найти и постоянную ошибку cδt
из-за расхождения временных шкал ИСЗ и
ПИ. Таким образом, по одновременным
наблюдениям трех ИСЗ можно получить
координаты места судна φ0,
λ0 и поправку
δt
за расхождение временных шкал.
ля
определения места судна одновременно
принимают данные не
менее чем от трех ИСЗ (рис.
16.18). При пересечении трех изолиний
(окружностей) на поверхности Земли
получается треугольник погрешности
из-за присутствия в измеренных расстояниях
р
постоянных ошибок cδt
(рис. 16.19). Место судна находится в точке
пересечения биссектрис вершин треугольника
погрешности. Найдя место судна (φ0,
λ0) можно
найти и постоянную ошибку cδt
из-за расхождения временных шкал ИСЗ и
ПИ. Таким образом, по одновременным
наблюдениям трех ИСЗ можно получить
координаты места судна φ0,
λ0 и поправку
δt
за расхождение временных шкал.
Если ставится задача определять и высоту h нахождения объекта над поверхностью Земли, то необходимо одновременно наблюдать не менее четырех ИСЗ. Большое число ИСЗ в системе GPS (18 — на первом этапе, 24 — на заключительном) обеспечивает одновременное наблюдение в любой точке Земли от 4 до 8 ИСЗ при 18 ИСЗ в системе и от 6 до 11 ИСЗ при 24 ИСЗ в системе. Среди этого числа спутников нужно выбрать такие, которые бы обеспечивали наибольшую точность обсерваций. Таковыми являются 3 ИСЗ на малых высотах с разностью азимутов около 120°. Для получения высоты h объекта выбирается 4-й спутник, расположенный в зените наблюдателя или вблизи него.
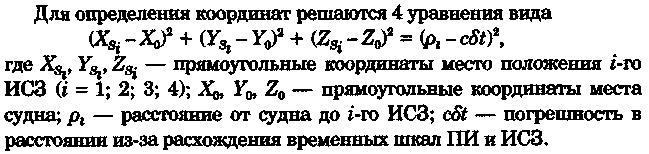
Уравнения решаются итеративным методом. Переход от прямоугольных координат Хо, Уо, Zо к географическим φ0, λ0 осуществляется по известным формулам геодезии.
Все спутники работают на одних и тех же частотах: f1 = 1575,42 МГц (λ = 19 см) и f2 = 1227,60 МГц (λ = 24 см) с применением псевдошумовой модуляции. Использовать две частоты необходимо для уменьшения влияния на точность обсерваций ионосферного эффекта. Для гражданских потребителей применяются одночастотные ПИ, работающие в грубом режиме C/A-code (Coarse Acquisition) с точностью измерения р порядка 16 м, для военных потребителей — двухчастотные ПИ, работающие в точном режиме Р-code (Precise) с точностью измерения расстояния порядка 6 м.
Точность определения места. Ошибка определения места по трем ИСЗ на поверхности Земли может быть рассчитана по приближенной формуле мореходной астрономии
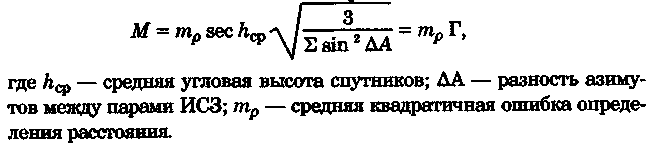
В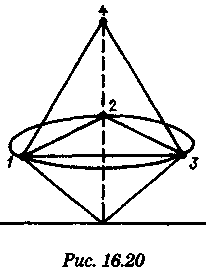 ыражение
ыражение![]()
х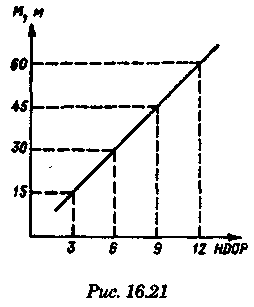 арактеризует
геометрические
условия
наблюдений
и
называется
геометрическим
фактором
(Geometric Delution of Precision — GDOP или
Horizontal Delution of Precision — HDOP). В
процессе приема сигналов ИСЗ их
геометрическое положение непрерывно
меняется: ряд ИСЗ уходит за горизонт,
другие появляются из-за горизонта В
морских ПИ решается задача выбора из
общего числа ИСЗ оптимального
созвездия из трех или четырех ИСЗ,
обработка сигналов которых обеспечивает
минимальное значение геометрического
фактора (минимальное значение ошибки
определения места). При работе по
трем ИСЗ Г = min,
если все три ИСЗ размещены одинаково
низко над горизонтом, образуя
равносторонний треугольник (разность
азимутов ∆А ≈ 120°). При этом Г = 1,45. При
работе по четырем ИСЗ
Г = min
= 2,6, если один ИСЗ в зените, а остальные
три будут иметь одинаковую высоту около
30°, образуя равносторонний треугольник
в плоскости расположения ИСЗ. При этом
объем тетраэдра, образованного
направлениями от судна на ИСЗ, будет
максимальным (рис. 16.20).
арактеризует
геометрические
условия
наблюдений
и
называется
геометрическим
фактором
(Geometric Delution of Precision — GDOP или
Horizontal Delution of Precision — HDOP). В
процессе приема сигналов ИСЗ их
геометрическое положение непрерывно
меняется: ряд ИСЗ уходит за горизонт,
другие появляются из-за горизонта В
морских ПИ решается задача выбора из
общего числа ИСЗ оптимального
созвездия из трех или четырех ИСЗ,
обработка сигналов которых обеспечивает
минимальное значение геометрического
фактора (минимальное значение ошибки
определения места). При работе по
трем ИСЗ Г = min,
если все три ИСЗ размещены одинаково
низко над горизонтом, образуя
равносторонний треугольник (разность
азимутов ∆А ≈ 120°). При этом Г = 1,45. При
работе по четырем ИСЗ
Г = min
= 2,6, если один ИСЗ в зените, а остальные
три будут иметь одинаковую высоту около
30°, образуя равносторонний треугольник
в плоскости расположения ИСЗ. При этом
объем тетраэдра, образованного
направлениями от судна на ИСЗ, будет
максимальным (рис. 16.20).
Геометрический фактор нужен для оценки точности обсерваций. Ошибка обсервации пропорциональна величине геометрического фактора (рис. 16.21). Чем он меньше, тем место определено более точно. Величина геометрического фактора вычисляется при обсервациях: один раз в течение 5... 10 мин. Текущее значение геометрического фактора сравнивается с оптимальным его значением, заложенным в программу выбора созвездия спутников, или установленным самим штурманом. Для точных обсерваций должно быть 1,5 < Г < 5. При Г > 10 место получается менее точно. В некоторых ПИ, например «Shipmate GPS Navigator /ZS5700», точность обсерваций показывается на дисплее буквами: А (высокая точность), В (хорошая), С (удовлетворительная) и D (плохая).
Точность определения расстоянир зависит от следующих факторов:
-нестабильности шкалы времени ИСЗ;
-ошибок в орбитальной информации;
-нестабильности шкалы времени в ПИ;
-влияния ионосферы и тропосферы;
-шумов аппаратуры ИСЗ;
-шумов аппаратуры ПИ;
-многолучевости распространения радиоволн.
Суммарная средняя квадратичная ошибка получается порядка 16 м.
![]()
Постоянным режимом работы ПИ является навигационный (устойчивый прием сигналов одного и того же созвездия КСЗ), который может длиться от 10 до 40 мин. Этот режим чередуется с переходным режимом (прием данных от нового созвездия), который длится 5...8 мин. Вид информации на дисплее зависит от типа ПИ, но основными данными являются:
-Тгр,
-обсервованные координаты (φ0, λ0)
-геометрический фактор (HDOP),
-путь судна ПУ (course over ground),
-путевая скорость Vпу (speed over ground).
Последние определяются по серии обсерваций. Например, в ПИ фирмы RACAL-DECCA ПУ и Vпу определяются как средние величины за 5 мин по обсервациям с дискретностью 20 с. Точность определения скорости mv = 0,1 м/с, mпу = 0,1°.
Кроме Тгр, φ0, λ0, ПУ, VПУ ПИ могут выдавать дополнительную информацию:
1) ПУ и расстояние для плавания по дуге большого круга или локсодромии в заданную точку;
2) поперечное уклонение от выбранного пути (XTD — cross track distance);
3) курс выхода на выбранный путь (CTS — course to steer);
4) момент прохождения траверза точки (Passed WP);
5) прохождение траверза последней точки (Approaching LAST WP);
6) уклонение от места якорной стоянки (Anchor Watch);
7) запоминать φ, λ при падении человека за борт и вычислять курс и расстояние до этой точки и др.
При решении задач 2...6 ПИ дает звуковой сигнал, если превышает предел (Limit) заданной величины.
Объявленная точность СРНС GPS для ПИ режима С/А М = 100м (Р = 95%), для ПИ режима Р М = 50м (Р = 95%). Испытания системы, выполненные в США и других странах, показали, что эта точность вполне реальна.
Следует иметь в виду, что при использовании СРНС GPS могут иметь место ошибки из-за несоответствия геодезической основы карты и параметров референц-эллипсоида, принятого для расчета в ПИ. Поэтому перед нанесением обсервованной точки на морскую навигационную карту полученные φ0 и λ0 должны быть исправлены поправками за расхождение геодезических систем ПИ и карты.
Для нужд российского морского флота создается система ГЛОНАСС (глобальная навигационная спутниковая система). Она основана на измерении расстояний одновременно минимум до трех спутников из созвездия в 12 ИСЗ, размещенных на трех орбитах. Спутники запускаются на круговые орбиты высотой Н = 19100 км. Период их обращения 11 ч 15 мин, наклонение орбиты 64,8°, диапазон частот 1240... 1260МГц а ожидаемая точность определения места порядка 100м (Р = 95%).