Определение расстояний в море
Расстояние в море можно определить несколькими методами: с использованием дальномеров, по вертикальному углу, измеренному секстаном, по данным РЛС и глазомерно.
Д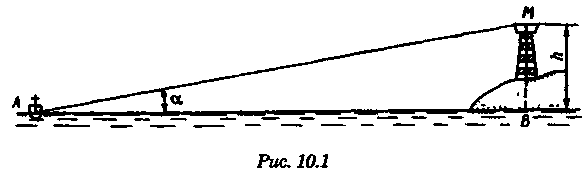 альномеры
представляют собой оптические приборы,
измеряющие расстояния до видимого
предмета на основе различных принципов.
Так, например, горизонтально
- базисные
дальномеры автоматически решают
треугольник по известному основанию
(базе прибора) и противоположному углу,
измеряемому оптическим устройством.
альномеры
представляют собой оптические приборы,
измеряющие расстояния до видимого
предмета на основе различных принципов.
Так, например, горизонтально
- базисные
дальномеры автоматически решают
треугольник по известному основанию
(базе прибора) и противоположному углу,
измеряемому оптическим устройством.
Стереоскопические дальномеры основаны на свойстве человеческого глаза различать глубину пространства. В них решается вертикальный прямоугольный треугольник по известной высоте предмета и измеренному противоположному углу. Точность измерения расстояний дальномерами зависит от базы прибора и измеряемого расстояния. На судах морского флота дальномеры не нашли применения и расстояния измеряются с помощью РЛС или, когда возникает необходимость, с помощью секстана, позволяющего измерять угол с высокой точностью.
Задача определения расстояния до предмета, расположенного ближе видимого горизонта, может быть решена двумя путями — измерением вертикального угла между вершиной предмета и его основанием или между вершиной предмета и урезом воды у береговой черты. В последнем случае в расчет вводится высота предмета над уровнем моря. В морях с приливами необходимо учитывать высоту прилива, так как высота объекта в пособиях приводятся, как правило, от среднего уровня полных сизигийных вод. При измерении вертикального угла от основания объекта возникают затруднения, так как не всегда возможно распознать основание на фоне береговой черты или строений.
При измерении вертикального угла следует различать три случая:
а) основание предмета находится ближе видимого горизонта и высота предмета известна. Тогда, измерив вертикальный угол α, можно рассчитать расстояние до предмета (рис. 10.1). Принимая участок моря за плоскость, из ∆АВМ получим
![]()
Для получения D в морских милях необходимо h выразить в морских милях, a tg α заменить углом, тогда
При обработке
наблюдения необходимо учитывать поправку
индекса i
и инструментальную поправку s
секстана, т. е.
![]()
где ос — отсчет секстана.
Земная рефракция для основания и вершины будет примерно одинаковой, поэтому ее можно не учитывать.
Формула (10.1) получена из предположения, что высота глаза равна нулю и предмет находится непосредственно у уреза воды. На практике эти условия выполняются редко, поэтому в расчетах бывают ошибки.
1. Ошибки из-за пренебрежения высотой глаза наблюдателя.
2. Ошибки при измерении вертикального угла ориентира, удаленного от береговой черты на расстояние L…(в уч. Есть еще какой-то бред про точность, но я на его забил )
Определение места судна по измеренным расстояниям
Е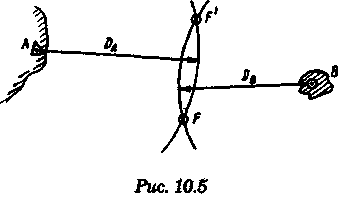 сли
в видимости судна имеются два ориентира,
до которых измерены расстояния (по
вертикальному углу или по данным РЛС),
то обсервованное место судна можно
получить по двум расстояниям. Пусть А
и В—два объекта, до которых измерены
расстояния DA
и DB.
Известно, что измеренному расстоянию
соответствует изолиния — окружность
радиусом, равным этому расстоянию, и с
центром в точке расположения ориентиров.
Если оба наблюдения сделаны одновременно,
то, проложив две окружности, в одной
из точек получим место судна (рис. 10.5).
Вопрос о том, какую из двух точек считать
обсервованным местом, легко решается
путем сопоставления со счислимым
местом.
сли
в видимости судна имеются два ориентира,
до которых измерены расстояния (по
вертикальному углу или по данным РЛС),
то обсервованное место судна можно
получить по двум расстояниям. Пусть А
и В—два объекта, до которых измерены
расстояния DA
и DB.
Известно, что измеренному расстоянию
соответствует изолиния — окружность
радиусом, равным этому расстоянию, и с
центром в точке расположения ориентиров.
Если оба наблюдения сделаны одновременно,
то, проложив две окружности, в одной
из точек получим место судна (рис. 10.5).
Вопрос о том, какую из двух точек считать
обсервованным местом, легко решается
путем сопоставления со счислимым
местом.
Ошибки в определении места судна по двум расстояниям зависят от трех факторов:
-
н
 еодновременности
измерения расстояний,
еодновременности
измерения расстояний,
-
ошибок измерений
-
и угла пересечения линий положения.
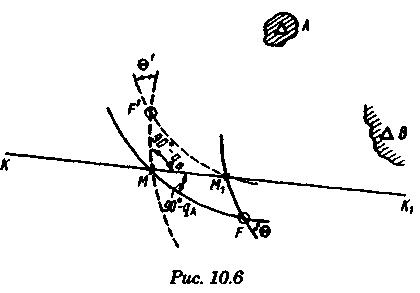
Чтобы уменьшить влияние неодновременности измерения расстояний, нужно первым измерять расстояние до предмета, который находится ближе к траверзу, так как смещение линии положения из-за движения судна в этом случае будет меньше (рис. 10.6).
Пусть А и В — два ориентира, по которым определяется место судна. Бели первым, когда судно находится в точке М, измерить расстояние до ориентира А, вторым, когда судно находится в точке М1 — до ориентира В, то получим место в точке F. При обратном порядке измерения расстояний место судна получается в точке F'. Поскольку всегда целесообразно определять место судна в момент последних наблюдений, сравним отрезки FM1 иF'M1.

Из равенства (10.7) видно, что для уменьшения ошибки, вызванной неодновременным измерением расстояний, первое наблюдение нужно делать до ориентира, расположенного ближе к траверзу.
Для исключения ошибки от неодновременности измерения расстояний можно произвести осреднение первого наблюдения, если его повторить после второго.
Если между измерениями расстояний промежуток времени составляет несколько минут, то выполняется графическое приведение линий положения к одному моменту. Для этого вторая линия положения смещается по курсу на величину пройденного расстояния, за данный промежуток времени.
Средняя квадратичная погрешность обсервованного места по двум расстояниям получается, если в общую формулу (8.12) подставить значения ошибок линий положения, помня, что градиент расстояния равен единице: