

639_Nosov_V.I._RRL_STSI._Mnogourovnevyj_kodek_
.pdf
|
Интерферирующая волна |
|
Прямая волна |
A |
Б |
а
1/
t
|
A |
|
б |
|
|
-1/2T |
0 |
1/2T |
|
Частота |
|
|
Б |
|
-1/2T |
0 |
1/2T |
|
Частота |
|
Прямая волна
Интерферирующая волна
в
|
Суммарная волна |
|
|
-2Т -Т 0 |
Т 2Т |
-2Т -Т 0 |
Т 2Т |
Время |
|
Время |
|
Рисунок 6.2 Появление межсимвольных помех при многолучевом приеме. |
|||
121
Q
3
 =0
=0
P
3
а
Q
4.1
3
 =0
=0
3
1.1
P
б
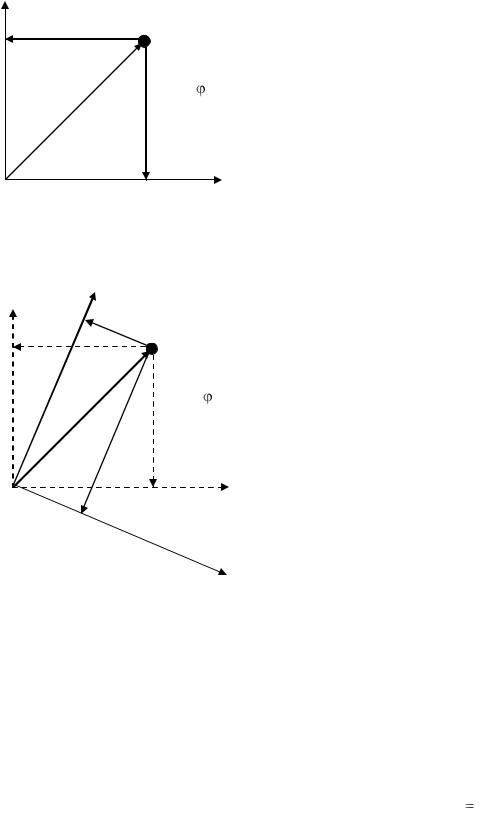
Рисунок 6.3 Появление межсимвольных помех из-за переходов между квадратурными составляющими
Если фаза опорного сигнала совпадает с фазой приходящего сигнала  0 рисунок 6.3 а, то проекции пришедшего сигнала на синфазную и квадратурную оси опорного сигнала так же дадут амплитуды +3L на выходах фазовых детекторов синфазного и квадратурного каналов
0 рисунок 6.3 а, то проекции пришедшего сигнала на синфазную и квадратурную оси опорного сигнала так же дадут амплитуды +3L на выходах фазовых детекторов синфазного и квадратурного каналов
122
UQ UC sin U P UC cos
C
C
|
|
|
|
|
|
|
18 sin 45 |
3, |
|
||||
|
|
|
|
|
(6.1) |
|
18 cos 45 |
3 |
|||||
|
||||||
Если же фаза опорного сигнала не точно сфазирована под принимаемый сигнал например на рисунке 6.3 б 
 300 , то проекции пришедшего сигнала получаются уже в другой системе координат, где амплитуда сигнала (длина вектора) остается без изменения, а фаза этого сигнала в новой системе координат станет равной
300 , то проекции пришедшего сигнала получаются уже в другой системе координат, где амплитуда сигнала (длина вектора) остается без изменения, а фаза этого сигнала в новой системе координат станет равной
|
' |
|
0 |
0 |
|
|
|
C |
C |
( 30 ) |
C 30 |
|
(6.2) |
При этом амплитуды проекции входного сигнала на синфазную и |
||||||
квадратурную оси будут равны соответственно |
|
|
||||
UQ' |
UC sin |
C' |
4,1;UP' |
UC cos C' |
1,1; |
(6.3) |
Из (5.1), (5.2) и рисунков 5.3 б и 6.3 следует, что если при восстановлении |
||||||
фазы опорного сигнала |
ОП будет присутствовать фазовая ошибка ±Δ , то |
|||||
даже при отсутствии межсимвольных помех из-за ограничения полосы сигнала в тракте передачи и из-за многолучевого распространения, а также при отсутствии шумов, помех и искажений, амплитуды откликов в отсчетные моменты времени будут отличаться от единицы. Такое изменение амплитуды отклика и можно рассматривать как межсимвольную помеху. Смысл ее в том, что отсчетные моменты символ из синфазного Р канала может создать помеху (изменить амплитуду) при приеме символа в квадратурном канале Q и наоборот.
Межсимвольные помехи, вызванные переходом сигналов с горизонтальной поляризации на вертикальную и наоборот. Такой вид межсимвольных помех может возникать только в тех случаях, когда используется поляризационное уплотнение, т. е. когда на одной частоте передаются модулированные сигналы
двух стволов |
одного - с |
горизонтальной другого |
- с вертикальной |
поляризацией. |
|
|
|
Как показано в первом |
разделе при величине кросс поляризационной |
||
развязки более 35 дБ сигналы двух стволов, в которых передаются сигналы с 64 КАМ, не оказывают мешающего влияния друг на друга рисунок 6.4 а, так как при этом на выходе приемников сигналов с горизонтальной и вертикальной поляризацией амплитуды сигналов из-за влияния одной поляризации на другую не изменяются.
123

ЕВ |
ЕВ Е В |
В Г |
В Г |
|
|
ЕГ |
ЕГ Е Г |
Е В |
Г |
а |
б |
Рисунок 6.4 Появление кросс поляризационных межсимвольных помех.
В тракте распространения при появлении селективных замираний сигнала на данной частоте происходит деполяризация сигналов, в результате которой уменьшается угол между векторами ЕГ и ЕВ рисунок 6.4 б и снижается величина кросс поляризационной развязки. В рассматриваемом примере амплитуда сигнала на выходе приемника сигнала с горизонтальной поляризацией в этом случае увеличивается и становится равной Е Г=EГ+EВ Г, где Eв
Г, где Eв Г это амплитуда дополнительного сигнала из-за перехода с вертикальной поляризации на горизонтальную.
Г это амплитуда дополнительного сигнала из-за перехода с вертикальной поляризации на горизонтальную.
Из рисунка 6.4б следует, что при деполяризации сигналов даже при отсутствии межсимвольных помех из-за ограничения полосы, из-за многолучевости сигнала и из-за перехода с синфазного на квадратурный канал, а также при отсутствии шумов, помех и искажений амплитуды откликов в отсчетные моменты времени будут отличаться от единицы. Такое изменение амплитуды отклика и можно рассматривать как межсимвольную помеху. Смысл ее в том, что в отсчетные моменты символ из ствола с вертикальной поляризацией EВ, может создать помеху (изменить амплитуду) при приеме символа в стволе с горизонтальной поляризацией.
6.2 Принцип работы адаптивного трансверсального эквалайзера
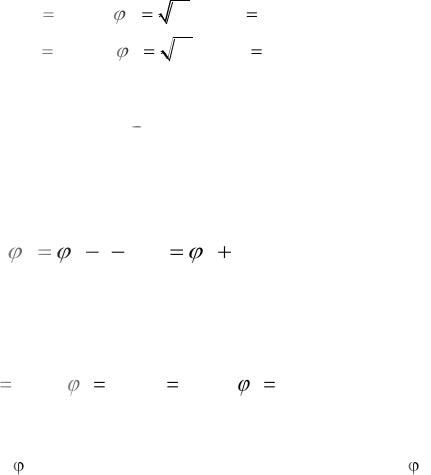
Все рассмотренные виды межсимвольных помех могут быть вычислены и скомпенсированы с помощью адаптивного трансверсального эквалайзера. Принцип работы трансверсального эквалайзера можно пояснить используя структурную схему рисунок 6.5а. На вход трансверсального эквалайзера поступает цифровой сигнал, соответствующий одному из уровней многоуровневого сигнала с межсимвольными помехами рисунок 6.5б. Это видно из импульсной характеристики тракта, где амплитуда сигнала в отсчетный момент меньше единицы и наличие сигналов в моменты времени
кТ.
124
Вход |
|
Выход |
Выходные |
||||||
|
Трансверсальный фильтр |
|
эквалайзера |
Решающее |
данные |
||||
|
|
|
|
|
|
|
устройство |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- 2 - 1 |
- -1 - -2 |
|
|
|
|
|
FT |
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
Генератор управляющих сигналов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Опорный сигнал |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Сигнал ошибки |
|
|
|||||
а
1,0 |
1,0 |
-2T -T |
T |
2T |
-2T -T |
T |
2T |
б |
в |
|
Рисунок 6.5 Принцип действия адаптивного трансверсального эквалайзера
Сигнал с межсимвольными помехами поступает на трансверсальный фильтр, построенный на основе аналоговой линии задержки, имеющей отводы через интервалы кратные длительности символа Тс с пятью или девятью отводами. Трансверсальный фильтр с пятью отводами позволяет компенсировать межсимвольные помехи при принятии решения по текущему символу от +1, 2 последующих и –1,2 предыдущих символов, а с девятью отводами от  4 соседних символов. Такая линия задержки позволяет при приеме текущего символа иметь на всех ее выходах в этот же интервал времени предыдущие и последующие символы, чтобы они могли участвовать в процессе компенсации межсимвольных помех, которые они могли внести в амплитуду отклика в отсчетный момент текущего символа.
4 соседних символов. Такая линия задержки позволяет при приеме текущего символа иметь на всех ее выходах в этот же интервал времени предыдущие и последующие символы, чтобы они могли участвовать в процессе компенсации межсимвольных помех, которые они могли внести в амплитуду отклика в отсчетный момент текущего символа.
Далее в трансверсальном фильтре осуществляется перемножение символов на 1,2 отводах с сигналами, вырабатываемыми генератором управляющих сигналов. Эти управляющие сигналы -1, -2, 1, 2 представляют собой не что иное как величины межсимвольных помех, которые символы S-1, S-2 и S1, S2 могли внести в амплитуду отклика в отсчетный момент текущего символа.
125
Результат перемножения символов S-1,S-2,S1,S2 с управляющими сигналами -1, -2, 1, 2 подается на сумматор с инверсией. Причем символ So , по которому принимается решение, подается на сумматор непосредственно с вывода
аналоговой линии задержки.
Сигналы ошибки , из которых вырабатываются управляющие сигналы - 1, -2, 1, 2 , получаются на выходе вычитателя, на входы которого поступают сигналы с выхода трансверсального фильтра (до принятия решения) и с выхода решающего устройства.
В решающем устройстве задается порог Uпорi , соответствующий номинальному значению анализируемого уровня на выходе трансверсального эквалайзера рисунок 5.5 а. Решение принимается в середине текущего символа, что задается тактовой частотой FT рисунок 6.5б. Если в середине тактового интервала Uвх  Uпорi , то принимается решение о принятии данного i – го уровня, если же Uвх Uпорi , - принимается решение о принятии i-1 – го уровня.
Uпорi , то принимается решение о принятии данного i – го уровня, если же Uвх Uпорi , - принимается решение о принятии i-1 – го уровня.
Основу генератора управляющих сигналов составляет дискретная линия задержки на основе регистра сдвига. Эта линия задержки расставляет по времени управляющие сигналы -1, -2, 1, 2 для подачи их на перемножители, соответствующие символам S-1,S-2,S1,S2 на отводах трансверсального фильтра.
Из рисунка 6.5 следует, что адаптивный трансверсальный эквалайзер работает по принципу замкнутой системы автоматического регулирования с минимизацией ошибки . В результате работы такого эквалайзера компенсируются межсимвольные помехи и на его выходе отклик канала на единичный импульс принимает вид, соответствующий отсутствию межсимвольных помех рисунок 6.5 в.
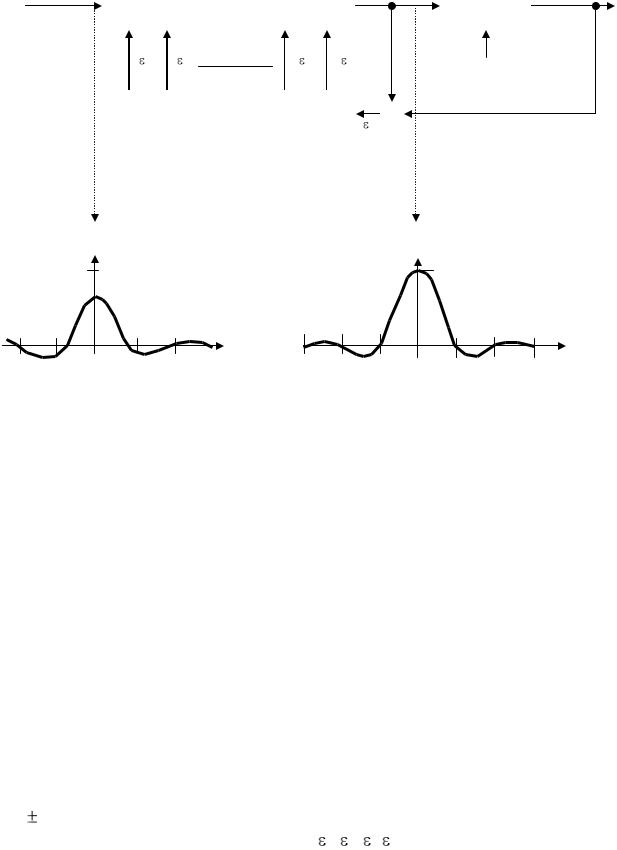
Принцип работы адаптивного трансверсального эквалайзера можно пояснить на примере работы корректора Лакки рисунок 6.6.
6.2.1 Вычисление весовых коэффициентов
Рассмотрим подробнее выработку весовых коэффициентов генератором управляющих сигналов на примере адаптивного корректора Лакки. Примененный в этом типе адаптивного корректора сигнала (АКС) принцип определения откликов реакции на единичный элемент, является основным для многих последующих модификаций и в настоящее время получил наиболее широкое распространение.
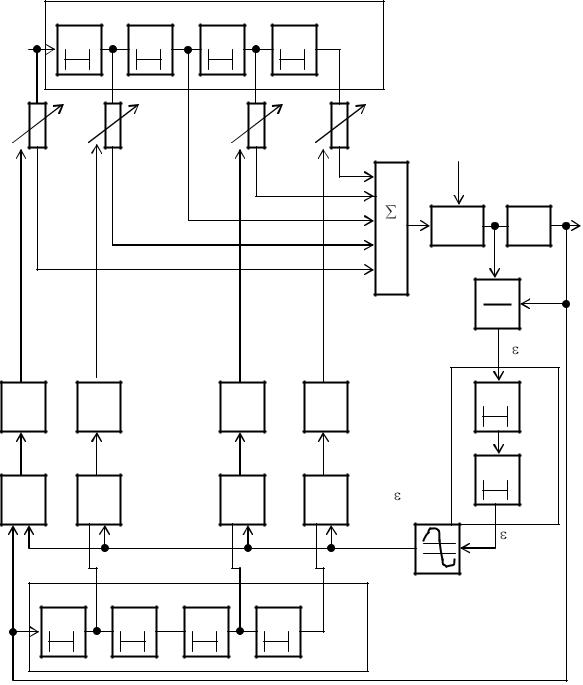
Функциональная схема АКС с четырехзвенной линией задержки применительно к примеру двухпозиционного видеосигнала изображена на рисунке 6.6. Видеосигнал со входа АКС проходит через обычный гармонический корректор, состоящий из аналоговой линии задержки (АЛЗ) с отводами через тактовый интервал То, регуляторов затухания по отводам Vз и сумматора.
126
Вх |
|
|
АЛЗ |
T0 |
T0 |
T0 |
T0 |
V-2 |
V-1 |
|
V1 |
V2 |
|
|
|
|
|
|
|
ТС |
|
|
|
|
|
|
|
Вых |
|
|
|
|
|
Строб |
ПУ |
|
|
|
|
|
В*i |
|
|
|
|
|
|
|
€ |
|
|
|
|
|
|
Bi |
|
|
|
|
|
|
* |
|
|
|
|
|
|
i |
И -2 |
И -1 |
И 1 |
И 2 |
|
|
T0 |
|
|
|
||||
|
|
|
А |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Л |
|
|
|
|
|
|
З |
|
|
|
|
|
|
T0 |
М -2 |
М -1 |
М 1 |
М 2 |
Sign |
* |
|
i-2 |
|
|||||
|
|
|
|
|
|
* |
|
|
|
|
|
|
i-2 |
В*i |
В*i-1 |
В*i-3 |
В*i-4 |
|
|
|
T0 |
T0 |
T0 |
T0 |
|
|
|
|
|
|
ДЛЗ |
|
|
|
|
Рисунок 6.6 Адаптивный корректор Лакки. |
|
||||
Поскольку работа АКС в данном случае рассматривается применительно к передаче двоичного сигнала, выходной дискриминатор, на который поступает стробированный тактовыми импульсами устройства выделения тактовой частоты УВТЧ и сигнал от гармонического корректора, представляет собой пороговое устройство ПУ с нулевым значением порога. Выход ПУ является информационным выходом приемника. Работа остальных узлов АКС сводится
127
к определению знака реакции частотного тракта на единичный элемент РЕЭ в каждой из корректируемых точек и на основании полученной информации о знаке к изменению в определенную сторону затухания по соответствующему отводу .
Проследим эту работу на примере управления каким-либо одним отводом, например первым (V1) (принцип регулировки в остальных отводах аналогичен). Сигнал на входе ПУ в i-ый момент отсчета Bi можно рассматривать, как суперпозицию неискаженного основного значения передаваемого единичного элемента Ci, откликов реакции на единичный элемент bs и помехи i. Причем знак каждого отклика в данный момент определяется знаком РЕЭ в соответствующей точке siqnbs и знаком породившего эти отклики символа siqnCi-s:
|
|
m |
|
|
|
|
|
|
B' |
C |
|
b |
sign(b )sign(C |
) |
i |
|
|
i |
i |
|
s |
s |
i s |
|
(6.3) |
|
|
s |
n |
|
|
|
. |
||
|
s |
0 |
|
|
|
|
|
|
Чаще всего рассматривается компенсация межсимвольных помех от одинакового числа предшествующих и последующих символов, т.е. m = n.
Символ Bi' означает, что отсчетное значение подвержено влиянию внешней
помехи. Выделим в полученной формуле (6.1) слагаемое, содержащее знак интересующего нас отклика.
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
B' |
C |
|
|
b |
sign(b )sign(C |
) |
b |
sign(b )sign(C |
) |
i |
|
|||||
i |
i |
|
|
s |
s |
i s |
|
1 |
1 |
i 1 |
|
|
||||
|
|
s |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ci |
' |
|
b1 |
|
sign(b1)sign(Ci 1) |
|
||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
i |
|
|
(6.4) |
|||||||
|
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
– величина отклонения, содержащая помеху и все отклики кроме |
|||||||||||||||
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
первого.
Начальная операция, совершаемая в АКС с целью определения знака отклика РЕЭ, состоит в вычислении ( схема вычитания ) из искаженного от счетного значения Bi' , его регенерированной оценки
ˆ |
sign(Bi ) |
(6.5) |
Bi |
При этом предполагается, что величина ошибки при формировании оценки невелика.
Итак, с учетом того, что siqn(Bi) = Ci, операция вычитания примет вид:
128
' |
' |
|
|
' |
' |
| b1 | sign(b1)sign(Bi 1) |
|
i |
Bi |
sign(Bi ) |
i |
(6.6) |
|||
После прохождения |
' |
через двухзвенную аналоговую линию задержки |
|||||
|
|
|
i |
|
|
|
|
на одном входе перемножающего устройства М1 имеем:
' |
' |
| b1 | sign(b1)sign(Bi 3 ) |
(6.7) |
i 2 |
i 2 |
А на втором входе модулятора с учетом прохождения оценки siqn(Bi) через три звена двоичной линии задержки основного отсчетного значения ДЛЗ 003, получаем siqn(Bi-3). Результатом перемножения сигналов будет:
' |
2 |
sign(B |
) |
|
|
' |
2 |
sign(B |
|
) |
| b | sign(b )sign(B |
)2 |
|||
i |
|
i 3 |
|
|
|
i |
i 3 |
|
1 |
1 |
i 3 |
|
|||
|
|
' |
sign(B |
|
|
) |
| b | sign(b ) |
|
|
|
(6.8) |
||||
|
|
|
3 |
|
|
|
|
||||||||
|
i 2 |
i |
|
|
1 |
1 |
|
|
|
|
|
||||
Так как первое слагаемое состоит из не коррелированных (или, в общем случае слабо коррелированных) сомножителей, то в результате последней операции – усреднения посредством интегратора И1 – получим искомую информацию о знаке РЕЭ в точке отсчета. На основании информацию о знаке РЕЭ в точке отсчета будет производиться управление соответствующим регулятором.
То же выражается математически как:
i' 2sign(Bi 3 ) | b1 | sign(b1) b1, (6.9)
так как
i' 2sign(Bi 3 ) 0
После вычисления весовых коэффициентов и сложения их в сумматоре с сигналом при s = 0, происходит компенсация МСИ.
Из рисунка 6.6 следует, что если символы S 1,S 2 были нулем, то после
регуляторов |
перемножителей V 1,V 2 |
компенсирующие |
напряжения будут |
||
равны нулю, |
если же |
символы |
были |
единицей, то с |
выхода регулятора |
(перемножителя) будут |
проходить |
соответствующие управляющие сигналы - |
|||
 1, -
1, - 2 . Т.е. в регуляторах (перемножителях) проверяется мог ли данный символ внести межсимвольную помеху.
2 . Т.е. в регуляторах (перемножителях) проверяется мог ли данный символ внести межсимвольную помеху.
6.2.2 Компенсация межсимвольных помех
Рассмотренные трансверсальные эквалайзеры компенсируют два вида межсимвольных помех, возникающих из-за ограничения полосы передаваемого сигнала и из-за влияния многолучевости при распространении радиоволн.
129
Для компенсации межсимвольных помех, возникающих из-за переходов с синфазной составляющей на квадратурную и наоборот, в каждом из потоков устанавливается второй адаптивный трансверсальный эквалайзер рисунок 6.7, на который подается цифровой поток Qi из квадратурного канала, соответствующий тому же уровню, что и поток Рi
Во втором трансверсальном эквалайзере на сумматор 1 не подается символ So , так как решение в решающем устройстве РУ принимается по символу So в синфазном канале. На генераторы управляющих сигналов первого и второго адаптивных трансверсальных эквалайзеров подается один и тот же сигнал ошибки , который определяется в синфазном канале.
При этом во втором трансверсальном эквалайзере проверяется могли ли символы S 1,S 2 из квадратурного канала внести межсимвольную помеху в амплитуду отклика в отсчетный момент принятия решения по символу So в
синфазном канале. В сумматоре |
1 |
второго трансверсального эквалайзера |
||
суммируются межсимвольные помехи |
от S 1,S 2 |
символов |
квадратурного |
|
канала и результат суммирования |
подается на |
сумматор |
2 , в котором |
|
осуществляется компенсация межсимвольных помех вызванных переходом с квадратурного канала на синфазный.
Аналогичным образом осуществляется компенсация межсимвольных помех из-за переходов с синфазного канала на квадратурный. При этом необходимое число адаптивных трансверсальных эквалайзеров равно удвоенному числу цифровых потоков по синфазному и квадратурному каналам. Так для 64 КАМ для компенсации межсимвольных помех, возникающих из-за ограничения полосы частот, занимаемой сигналом, многолучевого распространения радиоволн на пролетах и переходов с синфазного канала на квадратурный и наоборот, необходимо установить 32 адаптивных трансверсальных эквалайзера.
Для компенсации межсимвольных помех, возникающих из-за переходов с вертикальной поляризации на горизонтальную и наоборот, при использовании на радиорелейной линии поляризационного уплотнения, в схему станции на приемной стороне добавляется демодулятор кросс поляризационного сигнала (ХДем) и подавитель кросс поляризационных помех (ХРIC).
Структурная схема включения этих двух устройств приведена на рисунке 6.8. Дополнительная задержка, выполняемая с помощью отрезка коаксиального кабеля в цепи сигнала от кросс поляризационного сигнала, необходима для фазирования сигналов промежуточной частоты на входах двух демодуляторов. Эта же задержка осуществляет и фазирование цифровых сигналов на выходах демодуляторов.
130