

639_Nosov_V.I._RRL_STSI._Mnogourovnevyj_kodek_
.pdf0 наоборот амплитуды сигналов в квадратурном канале уменьшаются, а в синфазном – увеличиваются.
|
|
+ U |
|
- |
U |
7L |
7L |
7L |
5L |
5L |
5L |
3L |
3L |
3L |
1L |
1L |
1L |
-1L |
-1L |
-1L |
-3L |
-3L |
-3L |
-5L |
-5L |
-5L |
-7L |
-7L |
-7L |
а |
б |
в |
Рисунок 5.6 «Глазковые» диаграммы на выходе АТЭ при номинальных принимаемых уровнях а, заниженных уровнях б и завышенных уровнях в.
Если одновременно наблюдается занижение (завышение) уровней сигналов в синфазном канале и завышение (занижение) уровней в квадратурном канале, только в этом случае вырабатывается управляющий сигнал на изменение фазы генератора опорного сигнала, таким образом, чтобы уменьшить расхождение фаз входного и опорного сигналов на входах фазовых детекторов (5.2), а следовательно и выровнять амплитуды сигналов в синфазном и квадратурном каналах относительно их номинальных значений.
При выработке управляющих сигналов для автоматической регулировки усиления усилителей постоянного тока в синфазном УПТР и квадратурном УПТQ каналах осуществляется раздельный (независимый) анализ отклонения
101

принятых уровней от номинальных значений в синфазном и квадратурном каналах. В результате УПТр и УПТQ доводят уровни принятых сигналов до номинальных значений каждый в своем канале.
5.2.1 Восстановление опорного колебания.
Процесс восстановления опорного колебания должен быть настолько точным, чтобы фазовая ошибка  имела малую величину как постоянной составляющей, так и флюктуации (фазового дрожания).
имела малую величину как постоянной составляющей, так и флюктуации (фазового дрожания).
Один из методов восстановления несущей частоты состоит в том, что сигнал промежуточной частоты проходит через нелинейность, выбранную таким образом, чтобы образовать спектральную линию на несущей частоте или нескольких кратных частотах, и затем эта спектральная составляющая выделяется на устройстве с ФАПЧ (PLL).
Другой метод состоит в том, что составляющая несущей частоты может быть получена с помощью детектирования информационного потока, осуществленного так, чтобы удалить модуляцию в сигнале промежуточной частоты.
Третьим методом является метод прямого решения, особенно подходящий для многоуровневой КАМ. Выходами аналого-цифровых преобразователей АЦПI и АЦПQ являются цифровые потоки, представляющие из себя последовательности переданных данных. Из-за аддитивного шума, межсимвольной интерференции и других искажений значения выходных цифровых сигналов не будут совпадать с М дискретными сигнальными точками на фазово-амплитудной плоскости.
Другими словами они будут лежать внутри небольших круговых областей вокруг каждой из этих точек. Для случая 16-КАМ эти небольшие круговые площади показаны затемненными на рисунке 5.7. Они наложены на шаблон, состоящий из 64 квадратных областей, координаты которых хранятся в цифровой памяти устройства выделения несущей частоты.
Выходные выборки, попадающие в черные (серые) области, показывают, что есть необходимость во вращении по часовой стрелке (против часовой стрелки) совокупности выходных сигналов, что приводит к положительным (отрицательным) управляющим приращениям. Временная последовательность управляющих приращений проходит фильтр нижних частот и поступает на ГУН, чтобы управлять несущей частотой и фазой опорного сигнала (синхронизация несущей) рисунок 5.1.
5.3 Определение вероятности ошибочного приема.
Рассмотрим модель приемника цифровой системы передачи, показанную на рисунке 5.8. Приемник состоит из двух частей: цепи обработки сигнала и
102
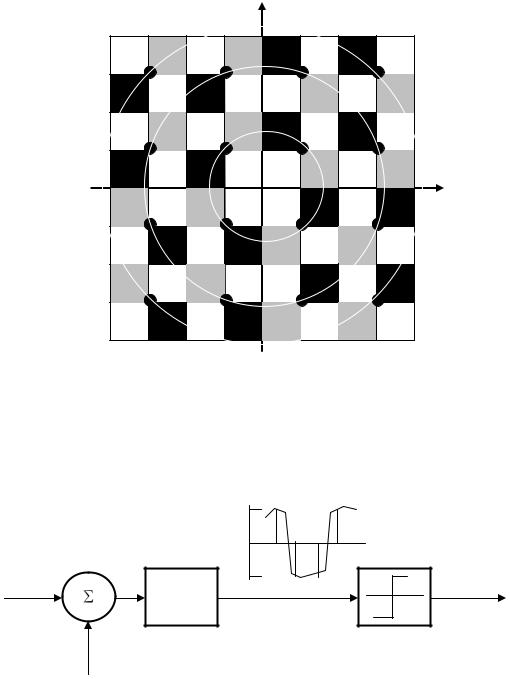
обнаружителя цифрового сигнала (решающего устройства). Решающее устройство оценивает на своем входе полярность сигнала в моменты принятия решения, определяемые тактовой частотой. Ошибки при решении возникают в том случае, когда в моменты принятия решения шум будет иметь амплитуду более или равную V и полярность противоположную полярности переданного импульса.
Q
P |
Рисунок 5.7 Восстановление опорного сигнала при 16-КАМ.
|
V |
|
|
|
-V |
1 |
1001 |
Сигнал |
|
||
H(f) |
|
|
|
|
|
|
|
|
|
0 |
|
|
Шум |
|
|
Рисунок 5.8 Модель приемника цифровых сигналов
103
Если шум имеет Гауссовское (нормальное) распределение вероятностей, то вероятность ошибки можно записать
|
|
|
|
p |
|
1 |
|
|
|
|
е t |
2 |
/ 2 |
2 |
dt |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(5.3), |
|||||||||
|
|
|
|
ош |
2П |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
||||||
где |
2 - мощность шума на входе решающего устройства. |
|
|||||||||||||||||||
Используя функцию ошибок |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
2 |
|
|
z |
|
|
|
|
|
|
|
|||
|
|
|
|
erfz |
|
|
e t |
2 |
dt |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(5.4), |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
П o |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
можно представить формулу ( 5.3) в виде |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
pош |
(1 |
|
|
erfz) / 2 |
(5.5), |
||||||||||||
где z |
V / |
2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Довольно часто вероятность ошибки выражается через функцию, |
|
||||||||||||||||||||
дополняющую функцию ошибок |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
pош |
|
(erfcz) / 2 , |
(5.6), |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где erfcz |
1 erfz; z v / 2 . |
|
|
|
|
|
|
|
|
|
|
||||||||||
При многопозиционной модуляции в решающем устройстве рисунок 5.1 обрабатывается многоуровневый сигнал и вероятность ошибки легко определяется из (5.6) путем соответствующего уменьшения расстояния ошибок d. Так, если максимальная амплитуда равна V, то расстояние ошибок между равномерно расставленными уровнями на входе решающего устройства
d |
V |
|
|
|
L 1 |
, |
(5.7) |
||
|
где L- число уровней. Тогда в соответствии с ( 5.6) вероятность ошибки в многоуровневой системе
pош |
1 |
|
L 1 |
erfc |
V |
|
|
|
, |
(5.8) |
log2 L |
|
|
|
|
|
|||||
|
|
(L 1) |
2 |
|||||||
|
|
L |
|
|
|
|||||
|
|
104 |
|
|
|
|
|
|
||

где (L-1)/L – отражает тот факт, что внутренние уровни в сигнале подвержены воздействию шума с положительной и отрицательной амплитудами;
коэффициент 1/log2 L – является результатом предположения, что в многоуровневой системе сигнал кодируется таким образом, чтобы ошибки в символах приводили к одиночным ошибкам в двоичном сигнале (log2 L равен числу битов на символ).
Из выражения (5.8) следует, что с учетом отношения пикового значения сигнала к шуму на входе решающего устройства при L – уровневой передаче вносится ухудшение (смещение) характеристики ошибок, равное 20lg(L-1)дБ.
Выражение (5.8) связывает вероятность ошибки с пиковой мощностью сигнала V2. Для определения вероятности ошибки по отношению к средней мощности сигнала в L-уровневой системе эта мощность определяется путем усреднения мощностей, соответствующих амплитудам различных импульсов
|
2 |
|
V |
2 |
3V |
2 |
|
2V 2 |
|
L 2 |
|
||
|
|
|
|
|
|
|
|
||||||
Vср2 |
|
|
|
|
|
|
|
... |
V 2 |
|
|
(2i 2)2. |
(5.9) |
L L 1 |
L 1 |
L(L 1) |
2 |
||||||||||
|
|
|
|
i 1 |
|
||||||||
При выводе ( 5.9) предполагалось, что появление различных амплитуд |
|
||||||||||||
|
|
|
|
V (L |
1) |
|
1, |
3,..., L 1 , |
|
|
|
||
равновероятно.
Из (5.8)следует также, что если в многоуровневой системе увеличить V в L-1 раз, то вероятность ошибки в L уровневой системе станет равной вероятности ошибки в двухуровневой системе (без учета коэффициентов 1/log2 L и (L-1)/L, которые обычно соответствуют нескольким десятым долям децибела).
Предыдущие выражения (5.3-5.8) для вероятности ошибки связывают эту вероятность с энергией сигнала в моменты принятия решения и мощностью шума на входе решающего устройства. При сопоставлении различных способов модуляции цифровыми сигналами, в частности для многоуровневых систем, более удобно связать характеристику вероятности ошибки с мощностью сигнала и мощностью шума на входе приемника.
Дисперсия шума 2 , использованная в предыдущих формулах, точно равна значению мощности, которая была бы измерена на входе решающего устройства при отсутствии сигнала
2 |
2 |
|
|
N H f df No |
Пш |
|
|
|
(5.10) |
o
105
|
|
|
|
|
ВТ |
|
где Nо - спектральная плотность мощности шума, |
|
; |
||||
Гц |
||||||
а Пш |
|
H f |
|
2 df - полоса, эквивалентная по шуму, или просто шумовая |
||
|
|
|||||
|
0 |
|
|
|
|
|
полоса фильтра приема с амплитудно-частотной характеристикой H(f). Амплитудно-частотная характеристика приемника H(f) непременно
обеспечивает компромисс между двумя противоречивыми целями. Во-первых, она должна минимизировать мощность шума, проходящего к решающему устройству, т.е. минимизировать Пш (5.10). Во-вторых, должна быть в максимально возможной степени увеличена разница между значениями +Vu –V в моменты принятия решения. Очевидно, что следовало бы сделать максимальным отношение сигнал-шум V2/ 2 на входе решающего устройства, чтобы минимизировать вероятность ошибки. Классический вывод из теории цифровой связи устанавливает, что V/δ становится максимальным, когда амплитудно-частотная характеристика приемника H(f) «согласована» с энергетическим спектром принимаемого сигнала.
При рассмотрении во временной области характеристика согласованного фильтра реализуется путем умножения принимаемого сигнала на каждый из видов импульсов (без шума), которые могут быть приняты. Сигналы на выходе умножителей (корреляторов) интегрируются на тактовом интервале для определения результирующего среднего значения коэффициента корреляции в течении этого интервала времени. Интегратор, на выходе которого появится наибольший сигнал, с наибольшей вероятностью указывает на символ, который был передан.
В большинстве систем передачи все сигналы или импульсы имеют одинаковые формы, а различаются только по амплитуде и полярности. Поэтому может быть использован единственный согласованный фильтр. Решение принимается путем сопоставления сигнала на выходе согласованного фильтра с соответствующими уровнями решения. Сигнал на выходе единственного коррелятора h(t) с интегратором имеет вид
|
T |
T |
|
|||
V |
S(t)h(t)dt |
|
S(t) |
|
2 dt, |
(5.11) |
|
|
|||||
|
0 |
0 |
|
|
|
|
где S(t) – форма сигнала или импульса, подлежащая измерению. Необходимо отметить, что V, по существу, представляет собой меру энергии сигнала на тактовом интервале.
E V 2T , |
(5.12) |
где Т– длительность символа.
106
Используя выражение ( 5.10) и параметр Е ( 5.12) для представления энергии символа, выразим вероятность ошибки в двоичном сигнале из выражения ( 5.6)
pош |
erfcz , |
(5.13) |
где z2 =Es/NoПш. |
|
|
При передаче двоичных сигналов энергия символа Еs |
равна энергии, |
|
приходящейся на бит |
|
|
Eb |
V 2Tb , |
(5.14) |
Отметим, что для заданной системы (постоянное значение Пш) вероятность ошибок зависит от отношения энергии символа ЕS к спектральной мощности
шума N0 .
В качестве примера типовой системы рассмотрим канал передачи импульсами постоянного тока с характеристикой типа «приподнятый косинус» (3.15) и оптимальным распределением характеристик фильтрации на приеме и передаче. Амплитудный спектр сигнала на выходе передатчика соответствует корню квадратному из спектра типа «приподнятый косинус» Yrc (f), определяемого выражением (3.15). Согласованный фильтр приема также имеет амплитудно-частотную характеристику, соответствующую корню квадратному
|
|
|
|
|
|
|
|
|
|
|
|
из характеристики типа «приподнятый косинус» Hпр ( f ) |
Yrc ( f ) . Отсюда |
||||||||||
шумовая полоса приемника |
|
|
|
|
|
|
|
||||
|
(1 |
) 2T |
|
|
|
||||||
Пш |
|
H ( f ) |
|
2 df |
|
Yrc ( f ) |
|
df 1 2T. |
(5.15) |
||
|
|
|
|
||||||||
|
0 |
|
|
|
0 |
|
|
|
|
|
|
Из (5.15) следует, что шумовая полоса приемника не зависит от α. Характеристика ошибки, представленная в выражении (5.8) для
многоуровневых систем, определяется мощностью шума на входе решающего устройства.
Если рассматривается постоянная шумовая полоса приемника (5.15), т.е. скорость передачи символов остается постоянной, то скорость передачи входного двоичного цифрового потока в модуляторе при этом возрастает с ростом числа уровней.
Если же требуется сопоставить многоуровневые системы при постоянной скорости передачи входного двоичного цифрового потока на входе модулятора, то длительность символов Тs и, следовательно, шумовые полосы должны быть соответственно изменены.
107
Если Тb – тактовый интервал для двухуровневой системы, в которой Тδ = Тs , то длительность символа Тs для L – уровневой системы, обеспечивающей передачу цифрового сигнала с той же скоростью
|
|
|
|
|
|
|
|
|
|
|
Ts |
Tb |
|
log2 L |
|
(5.16) |
|||||||
Используя |
|
|
шумовую полосу фильтра |
|
|
с |
характеристикой |
типа |
|||||||||||||||
«приподнятый конус» ( 3.15) для рассматриваемого случая получим |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
p |
|
|
|
1 |
|
|
|
L |
1 |
erfcz |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.17) |
|||||||||
|
|
|
|
|
|
|
|
|
|
ош |
|
|
log2 L |
|
|
L |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где z |
V (L |
1) N0 Ts . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Выражение (5.17) можно упростить и представить в более привычной |
|||||||||||||||||||||||
форме, |
используя то, что согласно (5.10, 5.11) |
Es |
Eb log2 L V 2Ts |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
pош |
|
|
|
1 |
|
|
L 1 |
erfcz |
|
|||||
|
|
|
|
|
|
|
|
|
|
log2 L |
|
(5.18) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
log2 L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где z |
|
|
Eb |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
L 1 |
|
|
No |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Таким образом, выражение (5.18) определяет вероятность ошибки в многоуровневых системах передачи импульсами постоянного тока при постоянной скорости передачи цифрового сигнала. Требования к полосе для систем с повышенным числом уровней уменьшается пропорционально log2L.
Выражение (5.18) определяет вероятность ошибок для многоуровневых систем через отношение Еb/No (одна и та же скорость передачи цифрового сигнала, но различные полосы). Следующее соотношение может быть использовано для определения вероятности ошибки в зависимости от отношения сигнал-шум на входе решающего устройства (различные скорости передачи цифровых сигналов, но одна и та же полоса):
c |
|
Eb (log2 |
L)Ts |
2(log2 |
L)Eb / No , |
(5.19) |
ш |
|
No (1/ 2Ts ) |
||||
|
|
|
|
|||
где (1/2Ts)– минимальная (по Найквисту) полоса сигнала.
108
Отношение сигнал-шум, полученное в (5.19) есть отношение мощности сигнала в момент принятия решения к мощности шума на входе решающего устройства.
5.3.1 Вероятность ошибки при М-ФМ.
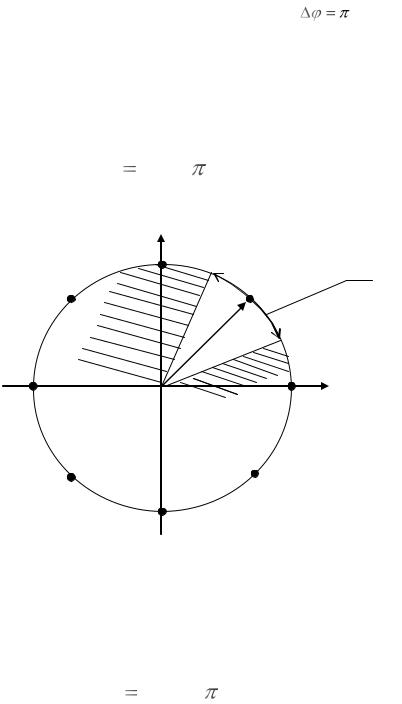
Вероятность ошибки для систем с многоуровневой ФМ легче всего получить, используя для сигналов представления с квадратурными каналами. Например, на рисунке 5.9 представлены области ошибок решения для характерных фаз в сигнале с 8-ФМ
Из рисунка 5.9 следует, что если под действием шумов и помех принимаемый сигнал с амплитудой равной 1 и фазой /16 относительно синфазной оси Р (что соответствует передачи комбинации символов в трех цифровых потоков 011), переместится в заштрихованные области, при принятии решения произойдет ошибка, т.е. будут приняты либо точка соответствующая комбинации символов 111, либо – 010. Т.е. в данном случае расстояние ошибок d
d 2sin( / 8) . |
(5.20) |
Q
000
d
001 |
010 |
101 |
011 |
P
100 |
111 |
110
Рисунок 5.9 Область принятия безошибочных решений при 8-ФМ
В общем случае расстояние ошибок в системах с М-ФМ и M фазами равно
d 2V sin( / М ) , |
(5.21) |
109 |
|
где V – амплитуда сигнала на входе детектора (т.е. радиус в пространстве сигналов при ФМ).
Из рисунка 5.9 следует, что ошибка при детектировании рассматриваемой сигнальной точки 011 приведет к ошибке в цифровом сигнале, равной только одному биту.
Обобщенное выражение для вероятности ошибки при М-ФМ определяется путем модификации выражения (5.6)
pош (1/ log2 M )erfcz |
(5.22) |
где z sin( / М ) V / 
 2 .
2 .
Амплитуда сигнала
V Eb (log2 M ) / T |
(5.23) |
а среднее квадратическое значение напряжения шума
No / 2T |
(5.24) |
для шума в минимальной по Найквисту полосе сигнала.
Комбинирование выражений (5.22-5.24) позволяет установить связь между вероятностью ошибки при М-ФМ, энергией на бит и плотностью шума в канале
pош (1/ log2 M )erfcz |
(5.25) |
|
|
|
|
|
|
Eb |
|
. |
где z sin |
|
|
log2 M |
|||||
|
|
|||||||
|
М |
|
|
|
|
No |
||
Для определения зависимости вероятности ошибки от отношения мощности сигнала к мощности шума можно воспользоваться выражением
c |
(log2 |
M ) |
Eb |
при М>2 |
(5.26) |
|
ш |
No |
|||||
|
|
|
|
5.3.2 Вероятность ошибки при М-КАМ
Вероятность ошибки в системе с многопозиционной (многоуровневой) модуляцией определяется, в конечном счете, областью (расстоянием) ошибок d.
110