

639_Nosov_V.I._RRL_STSI._Mnogourovnevyj_kodek_
.pdfНа рисунке 3.7 приведено определение расстояния ошибок для 64-КАМ. Из рисунка 3.7 видно, что если при приеме сигнальной точки 19 шумы и помехи переместят ее за пределы заштрихованного сектора - квадрата со стороной d, то на выходе детекторов будет зафиксирована одна из соседних сигнальных точек
11,18,27 или 20.
В общем случае расстояние ошибок в системе с М-КАМ
d |
2V |
|
||
|
|
(5.27) |
||
L 1 |
||||
|
||||
|
|
|||
где V – максимальная амплитуда выходного сигнала модулятора; L – количество уровней модулирующих сигналов по синфазному Р и квадратурному Q каналам Lр=LQ=L.
Выражение для вероятности ошибки систем с М-КАМ и когерентным детектированием определяется выражениями (5.8) и (5.18). В соответствии с (5.18) вероятность ошибки для системы с модуляцией 16-КАМ определяется для L=4.
Выражение (5.18) определяет вероятность ошибки в зависимости от отношения Еb/No. Чтобы получить зависимость вероятности ошибки от отношения сигнал-шум необходимо воспользоваться выражением (5.19), приняв за L число уровней в каждом из квадратурных каналов.
Из формул (5.21) и (5.27) следует, что М позиционная система с КАМ имеет преимущество перед М позиционной системой с ФМ при одном и том же уровне пиковой мощности. Значения расстояний ошибок, выполненные по (5.21) и (5.27) приведены в таблице 5.1. Поскольку расстояние ошибок определяет, в конечном счете, коэффициент ошибок (5.18), то в таблице приведены эти расстояния, выраженные в дБ d (дБ) = 20lg d и приведен выигрыш М-КАМ относительно М-ФМ ∆ d.
Расстояния ошибок для М-ФМ и М-КАМ
|
|
|
|
|
|
Таблица 5.1 |
|
|
ФМ |
|
|
КАМ |
|
|
|
М |
d, раз |
d, дБ |
М |
d, раз |
d, дБ |
∆ d дБ |
|
2 |
2 |
6,02 |
- |
|
|
- |
|
4 |
1,4142 |
3,01 |
4 |
1,4142 |
3,01 |
0 |
|
8 |
0,7854 |
-2,1 |
8 |
0,707 |
-3,01 |
-0,912 |
|
16 |
0,3927 |
-8,12 |
16 |
0,4714 |
-6,532 |
+1,59 |
|
32 |
0,196 |
-14,155 |
32 |
0,2828 |
-10,97 |
-3,185 |
|
64 |
|
|
64 |
0,2020 |
-13,893 |
|
|
|
|
|
128 |
0,1286 |
-17,815 |
|
|
|
|
|
256 |
0,0943 |
-20,51 |
|
|
|
|
|
1512 |
0,0615 |
-24,22 |
|
|
Из таблицы 5.1 видно, что при большом числе сигнальных точек системы с М-КАМ всегда имеют лучшие характеристики, чем системы с М-ФМ. Основная
111
причина этого состоит в том, что расстояние между сигнальными точками в системе с М-ФМ меньше расстояния между точками в сравнимой системе с КАМ.
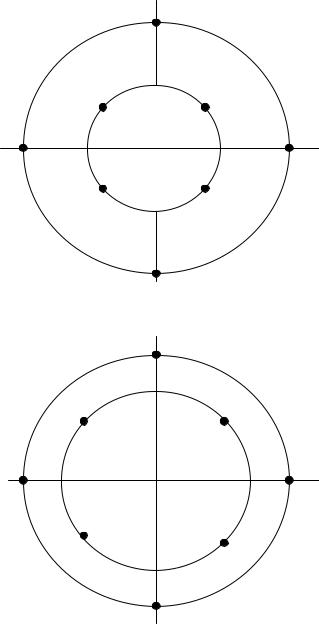
Хотелось бы остановиться на системе с 8-КАМ, (8-АФМ), расположение сигнальных точек которой приведено на рисунке 5.10 при постоянной пиковой мощности (V2 = 1) радиус большой окружности RБ = V = 1 а, малой окружности RM = 0,5 V рисунок 5.10а.
а
б
Рисунок 5.10 Расположение сигнальных точек при 8- КАМ.
При этом минимальное расстояние ошибок получается между точками расположенными на внутренней окружности d мин =0,707, т.е. эта величина
112

несколько меньше, чем при 8-ФМ. Если же взять радиус внутренней окружности равным 0,707V рисунок 5.10б, то dмин =0,707, т.е. система с 8-КАМ в первом и втором случаях дает проигрыш относительно системы с 8-ФМ.
Полученные значения ∆ d (таблица 5.1) показывают на сколько децибел
отстоят друг от друга кривые зависимости pош |
с / ш . |
Выигрыши в помехоустойчивости, приведенные в таблице 5.1, справедливы, если при ФМ и КАМ используется одинаковая пиковая мощность. А при одинаковом уровне средней мощности система с КАМ демонстрирует еще большее преимущество. Средняя мощность в системе с ФМ равна пиковой мощности Рср = Рпик. А в системе с КАМ согласно (5.7) отношение пиковой мощности к средней (пик фактор) равно
|
пик |
|
|
L(L |
1)2 |
|
|
|
|
|
|
|
|
|
|
р |
|
|
L / 2 |
|
|
(5.28) |
|
|
ср |
2 |
(2i |
1) |
2 |
||
|
|
||||||
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
Значения пик фактора сигнала Кр=10lg Кр с КАМ приведены в таблице 5.2.
Пик фактор сигнала с КАМ |
|
|
|
Таблица 5.2 |
||||
М |
4 |
16 |
32 |
64 |
128 |
256 |
|
512 |
Кр,дБ |
0 |
2,553 |
3,30 |
3,67 |
4,048 |
4,233 |
|
4,41 |
Таблицами 5.1 и 5.2 удобно пользоваться при определении относительной характеристики ошибок, т.е. выигрыша системы в отношении сигнал-шум.
Например, определим выигрыш в отношении с сигнал-шум системы с 16КАМ по сравнению с 16-ФМ в случае одинаковых пиковых мощностей, а также в случае одинаковых средних мощностей. Поскольку эти две системы имеют одинаковое число сигнальных точек на фазово-амплитудной плоскости, они передают сигнал с одной и той же скоростью и требуют одной и той же полосы для этой скорости передачи цифрового сигнала.
В соответствии с этим выигрыш в отношении сигнал-шум полностью определяется расстояниями между сигнальными точками. (При использовании различных скоростей надо учитывать влияние различных полос шума в приемниках). Из таблицы 5.1 следует, что при одинаковой пиковой мощности сигнала система с 16-КАМ дает выигрыш по сравнению с системой 16-ФМ равный 1,59 дБ. Из таблицы 5.2 также следует, что в системе с 16-КАМ отношение пиковой мощности к средней равно 2,55 дБ. Поскольку в системах с ФМ отношение пиковой мощности к средней равно единице, преимущество системы с 16-КАМ перед системой с 16-ФМ для равных средних мощностей составит 4,14 дБ.
При определении выигрыша систем с разной позиционностью модуляции, необходимо учитывать изменения полосы шума в приемнике, в зависимости от
113

позиционности модуляции. Если за исходную полосу шума в приемнике взять полосу при двухпозиционной модуляции П2, то выигрыш КПШ по отношению сигнал-шум при М позиционной модуляции Пм при неизменной скорости входного цифрового потока можно определить
|
|
|
|
КПШ |
10 lg |
П2 |
|
|
|
|
|
|
|
|
|
|
|
Пм |
|
|
|
(5.29) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
Результаты расчетов по (5.27) приведены в таблице 5.3 |
|
|
|
|
|
||||||||
|
Выигрыш по полосе при М позиционной модуляции |
Таблица 5.3 |
|||||||||||
М |
2 |
4 |
8 |
16 |
32 |
64 |
|
128 |
|
256 |
512 |
|
|
Кпш |
0 |
3,01 |
4,77 |
6,02 |
7,0 |
7,78 |
|
8,45 |
|
9,03 |
9,54 |
|
|
Используя данные таблиц 5.1-5.3 можно определить энергетический выигрыш (проигрыш) М позиционных методов модуляции друг относительно друга.
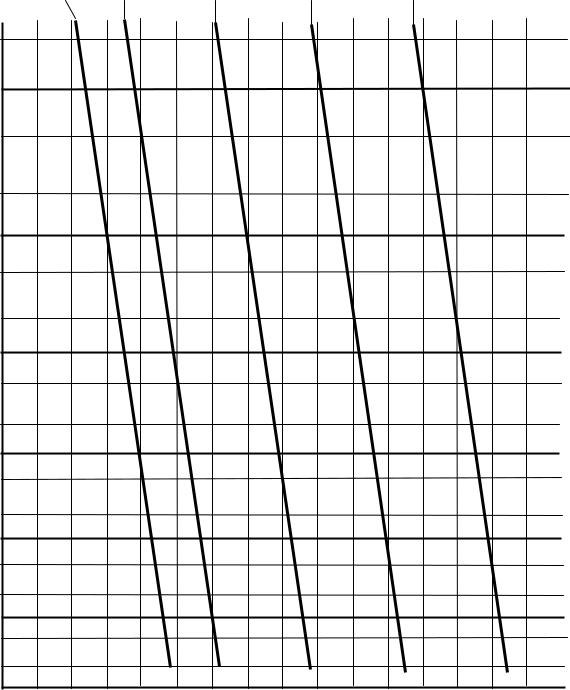
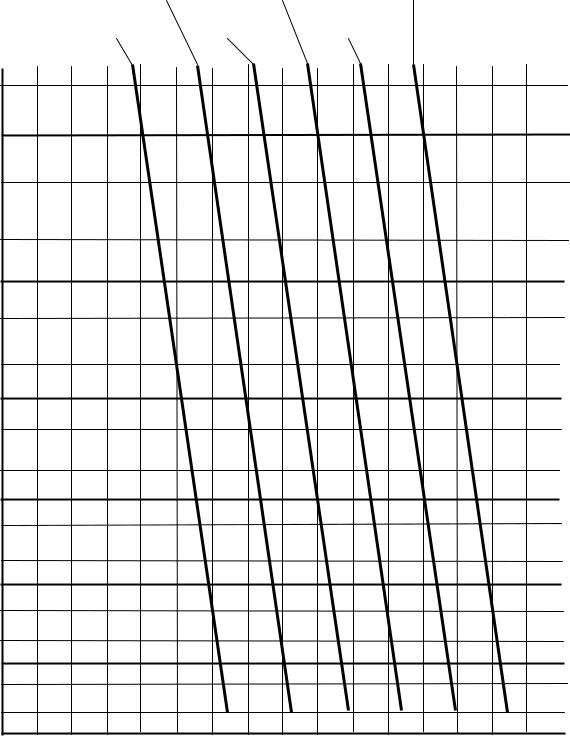
Зависимость вероятности ошибки от отношения сигнал-шум, рассчитанные по (5.25, 5.26) для М-ФМ приведены в таблице 5.4 и на рисунке 5.11, а рассчитанные по (5.18, 5.19) для М-КАМ приведены в таблице 5.5 и на рисунке 5.12.
|
Зависимость рош от отношения сигнал/шум при М-ФМ |
Таблица 5.4 |
|||||
|
|
2 |
4 |
8 |
16 |
32 |
|
10-4 |
|
8,32 |
11,32 |
16,39 |
22,1 |
27,92 |
|
10-5 |
|
9,54 |
12,54 |
17,66 |
23,3 |
29,25 |
|
10-6 |
|
10,5 |
13,5 |
18,5 |
24,27 |
30,1 |
|
10-7 |
|
11,28 |
14,28 |
19,28 |
25,05 |
30,9 |
|
10-8 |
|
11,94 |
14,94 |
19,94 |
25,71 |
31,54 |
|
10-9 |
|
12,51 |
15,51 |
20,51 |
26,28 |
32,11 |
|
|
Зависимость рош от отношения сигнал/шум при М-КАМ |
Таблица 5.5 |
||||||
|
|
16 |
32 |
64 |
128 |
256 |
512 |
|
10-4 |
|
18,15 |
21,84 |
24,39 |
27,95 |
30,45 |
34,0 |
|
10-5 |
|
19,4 |
23,09 |
25,64 |
29,2 |
31,53 |
35,24 |
|
10-6 |
|
20,36 |
24,01 |
26,6 |
30,16 |
32,66 |
36,2 |
|
10-7 |
|
21,19 |
24,88 |
27,43 |
31,0 |
33,49 |
37,03 |
|
10-8 |
|
21,87 |
25,56 |
28,11 |
31,67 |
34,17 |
37,71 |
|
10-9 |
|
22,44 |
26,13 |
28,68 |
32,24 |
34,14 |
38,28 |
|
114
2-ФМ |
4-ФМ |
|
8-ФМ |
|
16-ФМ |
|
32-ФМ |
|
|
||
2 |
|
|
|
|
|
|
|
|
|
|
|
10-4 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
10-5 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
10-6 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
10-7 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
10-8 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
10-9 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
6 |
8 |
10 12 |
14 |
16 |
18 |
20 22 |
24 |
26 |
28 |
30 |
32 РС/РШ, дБ |
|
|
Рисунок 5.11 Вероятность ошибки при М-ФМ |
|
||||||||
115
32-КАМ |
128-КАМ |
512-КАМ |
|
16-КАМ |
64-КАМ |
256-КАМ |
|
РОШ
2
10-4
5
2
10-5
5
2
10-6
5
2
10-7
5
2
10-8
5
2
10-9
5
2
12 14 |
16 18 20 |
22 |
24 26 |
28 30 32 |
34 36 |
38 РС/РШ, дБ |
Рисунок 5.12 Вероятность ошибки при М-КАМ
116
Для получения графика зависимости вероятности ошибки от отношения Eb/No из таблиц 5.4, 5.5 и рисунков 5.11, 5.12 достаточно учесть выигрыш по полосе Кпш при М позиционной модуляции. Например, для 4-ФМ вероятность ошибки pош = 10-4 получается при отношении сигнал-шум РС / РШ = 11,32 дБ. Эта же вероятность ошибки получается при отношении энергии на бит к спектральной мощности шума
Eb / No |
c |
КПШ |
8,31дБ |
|
|
(5.30) |
ш
Из таблиц 5.5 и 5.6 видно также, что при М-ФМ увеличение кратности модуляции в два раза приводит к проигрышу в отношении сигнал-шум примерно на 5,5 дБ, в то время как при М-КАМ этот проигрыш составляет только порядка 3,5 дБ.
Контрольные вопросы
1.Поясните принцип работы М-КАМ демодулятора
2.Поясните работу системы тактовой синхронизации в КАМ демодуляторе
3.Поясните принцип работы АЦП в КАМ демодуляторе
4.Поясните обеспечение автоматических регулировок в КАМ демодуляторе
5.Определение вероятности ошибочного приема при М-ФМ
6.Определение вероятности ошибочного приема при М-КАМ
7.Поясните различие в определении вероятности ошибки в зависимости от отношения сигнал/шум и от отношения энергии бита к мощности шума
Список литературы
1.Беллами Дж. Цифровая телефония: Пер. с англ. – М.: Радио и связь,
1986. – 544 с.
2.Системы радиосвязи: Учебник для вузов / Н.И. Калашников, Э.И. Крупицкий, И.Л. Дороднов, В.И. Носов; Под ред. Н.И. Калашникова. М.: Радио и связь, 1988. – 352 с.
3.Спилкер Дж. Цифровая спутниковая связь / Пер. с англ.: Под ред. В.В.
Маркова. – М.: Связь, 1979. – 592 с.
4.Носов В.И. Основы построения радиорелейных линий синхронной цифровой иерархии. Учебное пособие. УМО по специальности связь. – Новосибирск.: СибГУТИ, 1999. – 98 с.
117

6 АДАПТИВНЫЙ ТРАНСВЕРСАЛЬНЫЙ ЭКВАЛАЙЗЕР
С выхода КАМ демодулятора по восемь цифровых потоков соответствующих восьми уровням по синфазному и квадратурному каналам поступают на вход адаптивных трансверсальных эквалайзеров, в которых после компенсации межсимвольных помех принимается решение о принятом уровне.
В отличие от адаптивного частотного эквалайзера адаптивный трансверсальный эквалайзер устраняет влияние последствий многолучевого распро-
странения во временной области (ATDE – Adaptive Time Domain Equalizer).
Рассмотрим виды межсимвольных помех, возникающих в тракте передачи:
1.межсимвольные помехи вызванные ограничением полосы передаваемого сигнала;
2.межсимвольные помехи вызванные многолучевым распространением сигнала на пролете;
3.межсимвольные помехи вызванные переходами сигналов с синфазного на квадратурный канал и наоборот;
4.межсимвольные помехи вызванные переходами сигналов с горизонтальной поляризации на вертикальную и наоборот при использовании поляризационного уплотнения.
6.1 Причины появления межсимвольных помех
Межсимвольные помехи, возникающие из-за ограничения полосы сигнала в тракте передачи определяются характеристиками фильтров на передающей и приемной сторонах пролета РРЛ, поэтому этот вид помех не изменяется во времени.
Полосу сигнала в тракте передачи формирует, в основном, фильтр нижних частот в КАМ модуляторе (см. раздел 3). Цепи позволяющие получить спектры Найквиста (3.15) при разных  рисунок 3.15 могут быть реализованы лишь с конечной степенью точности. Кроме этого, физически реализуемые цепи имеют конечную скорость убывания модуля коэффициента передачи при возрастании частоты, что также не позволяет реализовать спектры Найквиста при
рисунок 3.15 могут быть реализованы лишь с конечной степенью точности. Кроме этого, физически реализуемые цепи имеют конечную скорость убывания модуля коэффициента передачи при возрастании частоты, что также не позволяет реализовать спектры Найквиста при 

(3.15).
При этом условие (3.14) не выполняется в отсчетные моменты времени (в моменты принятия решения) и на выходе адаптивного трансверсального эквалайзера будут межсимвольные помехи -1, -2 от предыдущих S 1(t), S 2 (t) и
1, 2 от последующих S 1 (t), S 2 (t) посылок сигнала рисунок 6.1.
118
h(t)
1
а
h(t)
1
S1(t)
б
h(t)
1
S2(t)
в
h(t) |
- |
-1 |
|
||
г |
|
|
|
- |
1 |
h(t) |
- 2 |
|
|
||
д |
|
|
|
- |
-2 |
-2 |
- |
0 |
S0(t)
С искажениями
Без искажений
t
S-1(t)
1
t
-1 |
S-2(t) |
|
-2
t
2
C1S-1(t+ )
t
 C1S1(t- )
C1S1(t- )
C2S2(t-2 )
t
 C2S-2(t+2 )
C2S-2(t+2 )
t
+  +2
+2
Рисунок 6.1 Образование межсимвольных помех и их компенсация.
119
Межсимвольные помехи из-за многолучевого распространения сигнала на пролете. В этом случае из-за рефракции радиоволн и изменения положения отражающего слоя разность хода прямого и отраженного лучей изменяется и на определенных частотах может наблюдаться приход прямого EПР и отраженного EОТР лучей в фазе случай Б или в противофазе случай А рисунок 6.2а.
При этом в точке приема наблюдается увеличение входного сигнала К до 10-15 дБ относительно его номинального значения. Вообще при минимально фазовых замираниях, когда ЕПР ЕОТР , максимально возможное увеличение суммарного сигнала составляет 6дБ.
На пролетах радиорелейных линий помимо минимально фазовых замираний в условиях двух лучевого приема наблюдаются и не минимально фазовые замирания в условия двух лучевого приема, при которых амплитуда отраженного сигнала может превышать амплитуду прямого сигнала ЕПР ЕОТР . При этом в точке приема может наблюдаться увеличение суммарного сигнала
Е ЕПР ЕОТР на 10-15 |
дБ относительно его номинального значения. |
На рисунке 6.2 б |
изображены спектры сигнала в стволе для случаев про- |
тивофазного А и синфазного Б прихода прямого и отраженного лучей. На этом же рисунке для этих двух случаев изображены импульсные характеристики тракта передачи для прямого и отраженного лучей и суммарного сигнала. При этом предполагается, что спектр Найквиста сформирован идеально (3.15) и межсимвольные помехи из-за ограничения спектра сигнала отсутствуют.
Из рисунка 6.2 в следует, что при наличии разности хода прямого и отраженного лучей , как в случае их прихода в противофазе так и в случае прихода в фазе, появляются межсимвольные помехи. Необходимо отметить, что из-за случайного изменения разности хода лучей, этот вид межсимвольных помех изменяется во времени случайным образом.
Межсимвольные помехи, вызванные переходом с синфазной составляющей на квадратурную и наоборот. При отсутствии межсимвольных помех в отсчетные моменты времени к = 0 (3.14) амплитуда отклика системы на единичный импульс должна быть равна единице. Любая причина отклонения амплитуды отклика в отсчетный момент от единицы может быть объяснена появлением межсимвольной помехи.
На рисунке 6.3 изображены векторные диаграммы сигналов, поясняющие причины появления данного вида межсимвольных помех. Из рисунка 6.3 видно,
что при формировании рассматриваемой сигнальной точки в модуляторе |
(см. |
||
раздел 3) использовались уровни +3L по синфазному и +3L по квадратурному |
|||
каналам. |
При |
этом выходной сигнал имеет амплитуду и |
фазу |
Uс 18, |
с |
450 . |
|
|
|
120 |
|