

2. Порядок выполнения работы
2.1 Включить ПЭВМ и дождаться загрузки программы имитации «САУ», выбрать номер заданного варианта.
2.2 С помощью блока ручного управления установить автоматический режим управления.
2.3 Установить заданное значение регулируемого параметра на середине рабочего интервала статической характеристики и дождаться окончания переходного процесса. Зафиксировать в журнале значение ZН регулируемого параметра по шкале вторичного прибора и положение вала ИМ ХН по указателю положения вала.
2.4 Быстро изменить на 10-20% заданное значение регулируемого параметра до ZЗ.
2.5 С момента изменения задания фиксировать по шкале вторичного прибора изменение во времени выходного параметра Z() и положение вала ИМ X() через каждые 2-5 с, занося данные в журнал наблюдений (см. табл.7). Измерения проводить до окончания переходного процесса или установления колебаний постоянной амплитуды.
2.6 Используя полученные значения, построить графики траекторий Z() и X(). Примерный вид переходных процессов показан на рис.18.
Таблица 7
Журнал наблюдений
, с |
Автоматический режим |
Ручное управление |
||
X() |
Z() |
X() |
Z() |
|
0 |
ХН |
ZН |
ХН |
ZН |
.. |
.. |
.. |
.. |
.. |
.. |
.. |
.. |
.. |
.. |
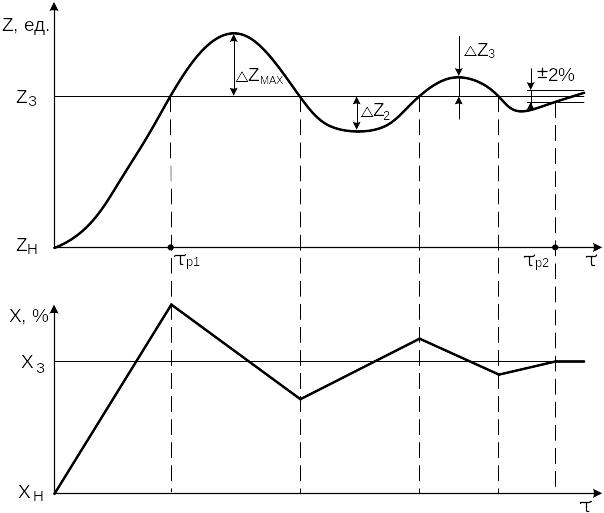
Рис.18 Примерный вид графиков переходных процессов
2.7 По построенным графикам определить количественные оценки качества САУ: Р1, Р2, е, , .
2.8 Привести систему в начальное состояние ZН(XН), для чего установить ручку задания в прежнее положение и дождаться окончания переходного процесса.
2.9 Перейти на ручной режим управления переключателем «Р».
2.10 Кнопками больше «>» и меньше «<», подавая управляющие команды на ИМ, постараться установить регулируемую величину на то же значение ZЗ, что и в автоматическом режиме. Повторить п.2.5. и 2.6
2.11 Определить параметры переходных процессов автоматического и ручного управления; сравнить их между собой.
2.12 Сделать выводы о качестве управления и эффективности работы САУ.
3. В отчете необходимо представить следующие материалы
3.1 Структурную схему САУ.
3.2 Прямые показатели качества: формулы, определения.
3.3 Таблицу рабочего журнала и расчет показателей качества работы САУ.
3.4 Графики переходных процессов в автоматическом и ручном режимах.
3.5 Выводы по работе.
4 Вопросы для самопроверки
3.1 Понятие качество применительно к САУ.
3.2 Структурная схема САУ вашего варианта.
3.3 Прямые показатели качества.
3.4 Какие показатели применяют для оценки качества колебательных процессов?
Библиографический список
1. Проектирование систем контроля и автоматического регулирования металлургических процессов: Учебное пособие для ВУЗов / Глинков Г.М., Маковский В.А., Лотман С.Л., Шапировский М.Р. – 2-е изд., перераб. и доп. – М.: Металлургия, 1986. – 352 с.
2. Кулаков Г.Т. Инженерные эксперсс-методы расчета промышленных систем регулирования: Спр. Пособие. – Мн.: Высшая школа, 1984. – 192 с.
3. Фрер Р., Ортенбургер Р. Ввдение в электронную технику регулирования. – М.: Энергия,1973. – 190 с.
4. Шубладзе А.М., Белова Д.А. Выбор оптимальных по степени устойчивости параметров ПИ-регуляторов // Приборы и системы управления. – 1984. - № 8. – с.28.
5. Метод автоматической настройки ПИД-параметров управления / Нишикава У., Саномия Н., Охта Т., Таиака Н. Пер. с англ. // Системы автоматического управления: Экспресс-информация. – 1985. - № 24.