

5.4.3. Особливості синтезу синхронних автоматів
У синхронних автоматах, на відміну від асинхронних, використовується тактовий сигнал С, що задає моменти часу, в які можуть мати місце зміни внутрішніх станів автомата. У синхронних автоматах здебільшого використовуються D- або JK-тригери. З особливостей роботи синхронних тригерів витікає, що зміна інформаційних сигналів не може викликати зміни стану ЕП. Звідси витікає, що особливість синхронних тригерів, яка полягає в тому, що інформаційні сигнали лише керують змінами станів тригерів, переноситься і на синхронні автомати. Тому, оскільки на всі тригери автомата синхросигнал подається одночасно, то вони і спрацьовують одночасно, незалежно від моменту подачі інформаційних сигналів.
У той же час, для синхронних автоматів, як відмічалось раніше, характерним є дискретний час, і стан автомата можна розглядати лише в дискретні моменти часу. Це дозволяє виключити з розгляду перехідні процеси, що протікають у комбінаційній схеми при зміні її вхідних сигналів.
Оскільки таблиці станів синхронних і асинхронних D- і JK-тригерів у цілому співпадають, то методи структурного синтезу синхронних автоматів ідентичні методам, використовуваним для синтезу асинхронних автоматів. У той же час, наявність синхронного режиму роботи всіх ЕП приводить до появи ряду особливостей проектування:
комбінаційні схеми можуть проектуватись не вільними від гонок;
допускаються несусідні зміни станів входу;
допускаються критичні змагання ЕП, тобто допускається несусіднє кодування внутрішніх станів.
У великій кількості практичних задач із синтезу синхронних автоматів перехід від словесного опису до стандартних способів задання функцій переходів і виходів буває дуже простим. Тому для синхронних автоматів часто можливо, минаючи етап абстрактного синтезу, зразу ж перейти до етапу структурного синтезу. Таке спрощення процедури синтезу є наслідком використання синхронних ЕП, які виконують значно складніші функції, ніж асинхронні потенційні тригери.
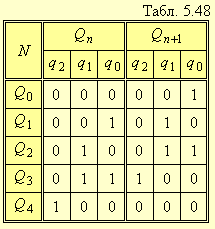
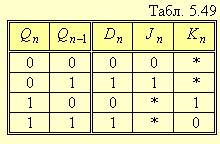
Приклад 5.11. Синтезувати лічильник за модулем 5, що задається таблицею переходів (Табл. 5.48) з використанням D- і JK-тригерів. Характеристичні таблиці переходів для D- і JK-тригерів приведені в Табл. 5.49.
|
|
Розв’язання. Будуємо таблицю збудження для D-входів в D-тригерах (Табл. 5.50).

З цієї таблиці отримуємо функціональні залежності входів D-тригерів D0 … D2 від попереднього стану виходів тих же тригерів (функція збудження):
![]() ;
;
![]() ;
;
![]() .
.
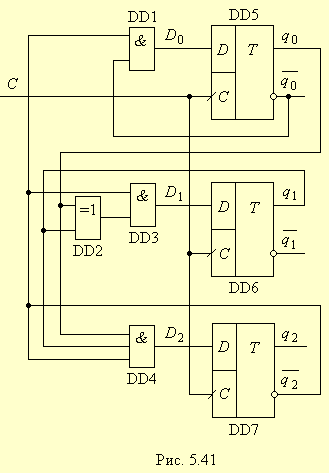
За отриманими функціями збудження розробляємо функціональну схему лічильника (рис. 5.41).
У початковому
стані
всі прямі виходи лічильника
![]() ,
а їх інверсні еквіваленти
,
а їх інверсні еквіваленти
![]() .
Тому на вході тригера DD5 маємо
.
Тому на вході тригера DD5 маємо
![]() ,
а на входах тригерів DD6 і DD7, відповідно,
,
а на входах тригерів DD6 і DD7, відповідно,
![]() і
і
![]() .
Тому при подачі синхросигналу DD5 записує
на своєму прямому вході
.
Це приводить до зміни значень входів
перед другим тактовим імпульсом. Тепер
ми маємо, що
.
Тому при подачі синхросигналу DD5 записує
на своєму прямому вході
.
Це приводить до зміни значень входів
перед другим тактовим імпульсом. Тепер
ми маємо, що
![]() ,
,
![]() ,
і по фронту С
обнуляється
,
а
.
Схема циклічно змінюватиме свої стани
у відповідності до алгоритму роботи.
,
і по фронту С
обнуляється
,
а
.
Схема циклічно змінюватиме свої стани
у відповідності до алгоритму роботи.
Тепер розглянемо особливості синтезу з використанням JK-тригерів. Будуємо таблицю збудження для входів JK-тригерів (Табл. 5.51).
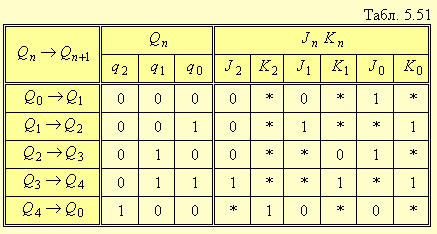
Після мінімізації знаходимо:
|
|
|
|
|
|
Схема лічильника з використанням синхронних лічильників приведена на рис. 5.42.
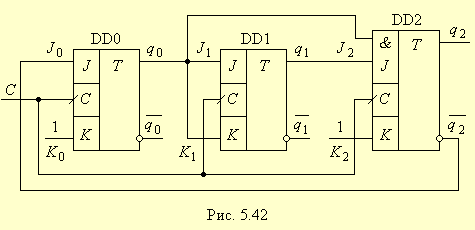
Легко проаналізувати і впевнитись, що робота схеми повністю відповідає заданому алгоритму.