

§ 7.2. Принятые допущения
В предлагаемом методе аналитического определения напряжения волочения сплошного профиля через коническую волоку, кроме допущений о направлениях траекторий главных нормальных напряжений, приняты следующие:
Во всех точках, расположенных на одной и той же траектории радиальных главных нормальных напряжений σr (рис.20, кривые l1, l2, ..., l5), их принимают одинаковыми (на контактной поверхности направление σr совпадает с направлением σпол). Это допущение вместе с условием пластичности (2-9) приводит к равенству в этих точках всех продольных главных нормальных напряжений σl. Опыты с отпечатками координатных сеток такого равенства не подтверждают, но осесимметричность деформационной зоны позволяет использовать для расчётных целей такое допущение.
Расчётное сопротивление деформации Sт по всей длине деформационной зоны принимают постоянным, равным его среднему значению в пределах этой зоны, т.е. Sтс. Это допущение не соответствует действительности, но на основании известной "теоремы о среднем" оно приемлемо для расчётных целей. Кроме того, это допущение заметно упрощает математические операции при решении задачи. В связи с таким допущением и на основании (2-9) условие пластичности принимает следующий вид: σl + σr = σтс. (7-2)
Силы внешнего трения учитывают коэффициентом трения по нормальному давлению, т.е. T = fnN. При этом коэффициент трения считается независящим от нормального давления. Обосновывается это тем, что волочение – такой вид ОМД, при котором нормальные напряжения на контактной поверхности, кроме возможного небольшого участка трехосного сжатия, всегда меньше сопротивления деформации, и, следовательно, напряжения трения на этой поверхности не достигают своего максимума.
Коэффициент трения на контактной поверхности принимают неизменным по всей её длине. В действительности, коэффициент трения изменяется, большей частью увеличиваясь к выходу, но закон такого изменения пока неизвестен, поэтому в расчётах приходится пользоваться некоторым средним значением этой величины fn ср. Уместно отметить, что волочение – это процесс, в котором при практически применяемых деформациях потери на трение составляют не более 50% от всей затрачиваемой работы, поэтому ошибки в выборе величины fn ср оказывают сравнительно небольшое влияние на результаты расчёта сил волочения.
Все последующие рассуждения и выводы относятся к установившемуся процессу волочения, при котором деформационная зона находится на таком расстоянии от заднего конца полосы, когда его влияние на поле напряжений и сдвигов исключено.
Контрольный вопрос.
1. Что служит базой аналитических методов?
Лекция 7
§ 7.3. Основная формула напряжения волочения
Связь между главными радиальными (σr) и нормальными (σn) напряжениями
Пусть на элементарную площадку dF контактной поверхности в окрестности точки A действует нормальное σn и касательное τf напряжения. Соответствующие
элементарные
силы будут равны (рис.115, а) ![]() (7-3)
(7-3)

Рис. 115. Связь между главными радиальными и нормальными напряжениями на контактной поверхности: а – деформационная зона; б – элементарные силы, действующие у точки А
Равнодействующая этих двух элементарных сил dR будет
![]() ,
(7-4)
,
(7-4)
а её направление III-III, совпадающее с направлением σпол, определится углом трения ρ.
В гл.II была обоснована возможность принять направление dR за направление главного радиального напряжения в точке A и, следовательно, допустить отсутствие касательных напряжений на элементарной площадке в плоскости II-II, перпендикулярной направлению III-III.
Проекция рассматриваемой площадки dF на плоскость II-II равна dF cosρ, отсюда главное радиальное напряжение определится
выражением
![]() .
(7-5)
.
(7-5)
Подставляя полученное значение σr в уравнение (7-2), можно представить условие пластичности для процесса волочения в следующем виде
![]() . (7-6)
. (7-6)
Определение суммы проекций на ось канала элементарных продольных сил, действующих на поверхности равных радиальных напряжений
Пусть дуга AB (рис.116) с центром в точке а и центральным углом βa является траекторией главных радиальных напряжений и одновременно представляет собой пересечение поверхности шарового сегмента деформационной зоны, находящегося на расстоянии x от выхода, с осевой плоскостью, а стрелки σlx представляют собой главные продольные напряжения, действующие на поверхности этого шарового сегмента. Элементарная сила dPб, действующая на элементарную площадку dFб, находящуюся у точки б, равна dPб = dFб σlx . (7-7)
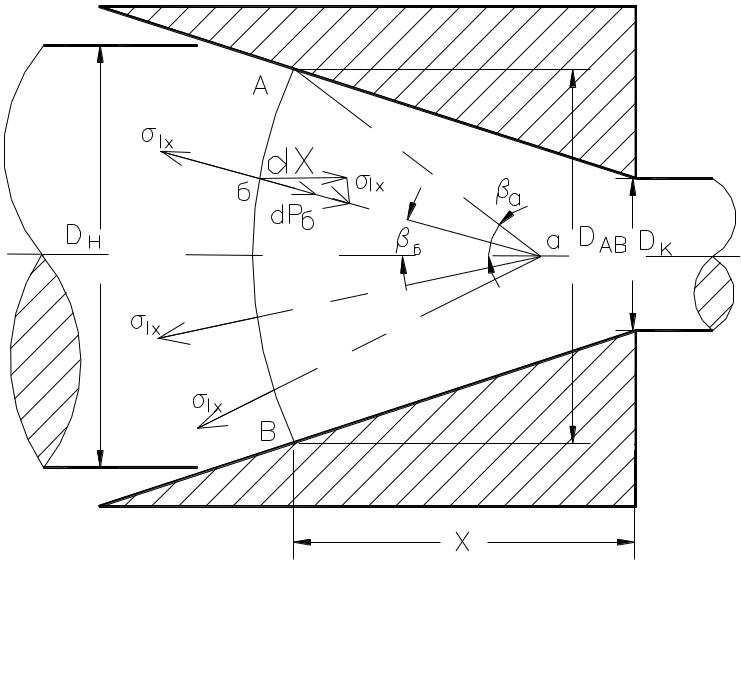
Рис. 116. Определение суммы проекций элементарных продольных сил, действующих на поверхности равных радиальных напряжений, на ось волочильного канала
Сила dXб, являющаяся осевой составляющей силы dPб, равна
dXб= dPбcosβб = dFбσlxcosβб. (7-8)
При суммировании осевых составляющих по поверхности шарового сегмента получается сила X, действующая на эту поверхность в осевом
направлении:
![]() . (7-9)
. (7-9)
Но
![]() есть не что иное, как проекция поверхности
шарового
есть не что иное, как проекция поверхности
шарового
сегмента на плоскость, перпендикулярную оси канала, т.е. круг D = AB. Отсюда X = σlx π/4 D 2AB. (7-10)
Величина продольного главного нормального напряжения σlк у выхода из деформационной зоны
В общем случае волочения круглого сплошного профиля через коническую волоку напряжения и силы, действующие на металл, находящийся в деформационной зоне, могут быть представлены следующим образом.
Деформационная зона (рис.117) ограничена каналом и двумя сферическими поверхностями AнBн и AкBк с действующими на неё противонатяжением Q = σqFн и силой волочения Pоб = Kс.обFк, где Kс.об – среднее напряжение волочения у выхода из обжимающей части канала, т.е. без учёта сил трения в калибрующей части канала.
Напряжения противонатяжения σq создают на поверхности AнBн продольные главные напряжения σlq, метод определения которых указан далее. Напряжения Kс.об создают на поверхности AкBк продольные главные напряжения σlк.
Выделим из деформационной зоны элементарный объём, образованный контактной поверхностью и двумя бесконечно близкими поверхностями равных главных радиальных и продольных напряжений, находящимися на расстоянии x от выхода из обжимающей части деформационной зоны. Эти две поверхности являются поверхностями шаровых сегментов, образованных дугами A1B1 и A2B2, примыкающими к контактной поверхности под углами (90º – ρ) и имеющими своими центрами точки a1 и a2. На этот элементарный объём действуют на контактной поверхности нормальные напряжения σnx и касательное напряжение fnσnx.
Эти два напряжения создают главное радиальное напряжение σrx, определяемое выражением (7-5). Направление этого напряжения совпадает с направлением касательных A1C1 и A2C2 к дугам A1B1 и A2B2, поэтому образованные этими дугами шаровые поверхности можно считать поверхностями равных главных нормальных напряжений. В соответствии с этим, на рис.117 показаны действующие по направлению радиусов дуг A1B1 и A2B2 продольные главные напряжения σlx и σlx + dσlx, величины которых зависят от расстояния x.

Рис. 117. Силы и напряжения, действующие в деформационной зоне при волочении круглого сплошного профиля через коническую волоку
Обозначив через Dx хорду дуги A2B2, представляющую собой поперечного сечения деформационной зоны, проходящую через точки A2 и B2, а через Fx = π/4 Dx2 это поперечное сечение и принимая во внимание связи(7-6–9), можно составить следующее дифференциальное уравнение равновесия рассматриваемого элементарного объёма в осевом направлении:
![]() . (7-11)
. (7-11)
Но ![]() и
и ![]() (7-12)
(7-12)
и
![]() .
(7-13)
.
(7-13)
Поэтому, разделив обе части уравнения (7-11) на π/4 Dx2, получим
![]() . (7-14)
. (7-14)
Условие пластичности (7-6) может быть переписано следующим образом:
![]() . (7-15)
. (7-15)
Принимая во внимание это условие и разделив переменные, дифференциальному уравнению (7-14) можно придать следующий вид:
![]() . (7-16)
. (7-16)
Обозначив cos2ρ (1+fnctgα) – 1 = a , (7-17)
уравнение
(7-16) можно представить в виде  , (7-18)
, (7-18)
а
после интегрирования
![]() , (7-19)
, (7-19)
где lnC – постоянная интегрирования.
При Dx = Dн, т.е. на дуге AнBн σlx = σlq. Тогда
![]() (7-20)
(7-20)
или  .
(7-21)
.
(7-21)
При Dx = Dк, принимая во внимание (7-19) и (7-21), продольное напряжение σlк у выхода из деформационной зоны, т.е. на дуге AкBк,
определяется
выражением  , (7-22)
, (7-22)
откуда  ,
(7-23)
,
(7-23)
или  . (7-24)
. (7-24)
При этом следует иметь в виду, что σlк не является напряжением волочения, т.к. на разных расстояниях от оси канала оно имеет разные направления, не совпадающие с осью канала.
Лекция 8
Напряжения волочения без учёта калибрующей зоны канала
Это
напряжение определяется выражением
![]() .
(7-25)
.
(7-25)
Для его определения необходимо найти Pоб. Пусть на площадку dF в окрестности точки δ (рис.118), находящейся на шаровом сегменте AкBк, ограничивающем выходную сторону деформационной зоны, действует продольная элементарная сила
dPδl = σlкdF. (7-26)
Чтобы создать эту элементарную силу, необходимо в осевом направлении приложить элементарную силу dPδx. Связь между силами dPδl и dPδx можно установить, исходя из следующих положений:
Направления этих сил определяются траекторией главных продольных напряжений CδD, проходящей через точку δ. (Траектория главных напряжений не может быть ломаной, т.к. в противном случае в точке излома появилось бы вместо трёх бесконечное число главных направлений, поэтому поворот рассматриваемой траектории происходит в окрестности точки δ непрерывно с каким-то радиусом r ).
Если разделить угол βδ между направлениями dPδl и dPδx на n частей (рис.118, справа вверху), обозначить γ = βδ/n (7-27)
и предположить, что изменение направления траектории CδD в окрестности точки δ происходит скачками через каждый угол γ, то можно считать, что рассматриваемая элементарная сила dPδl переходит в силу dPδ1, затем в dPδ2, и т.д., и, наконец, в силу dPδx.
Учитывая, что активной силой является сила dPδx, на основании элементарных законов механики можно считать, что для возникновения силы dPδl в направлении δl следует в этом направлении приложить силу
![]() .
(7-28)
.
(7-28)
Для возникновения силы dPδ1 необходимо в направлении δ2 иметь
силу ![]() (7-29)
(7-29)
и т.д., и, наконец, для возникновения силы dPδn-1 необходимо в направлении δx
создать
силу ![]() .
(7-30)
.
(7-30)

Рис. 118. Связь между продольными и осевыми силами и напряжениями
Т.к. скачкообразный переход направлений сил невозможен, то угол γ следует предположить бесконечно малым, т.е. при n→
 определить
предел функции
определить
предел функции
![]() .
(7-31)
.
(7-31)
Прологарифмировав выражение (7-31) и переписав его в виде
 , (7-32)
, (7-32)
Применив
правило Лопиталя, получитм
![]() .
(7-33)
.
(7-33)
Но,
если ![]() , то
, то ![]() (7-34)
(7-34)
и dPδl = dPδx . (7-35)
Это равенство показывает, что сила волочения Px = Pоб должна представлять собой сумму элементарных сил dPσl, взятых по поверхности Fшс
шарового
сегмента AкBк,
т.е., что ![]() .
(7-36)
.
(7-36)
Отсюда
среднее значение напряжения волочения ![]() .
(7-37)
.
(7-37)
Согласно
схеме (рис.118, внизу),  ,
(7-38)
,
(7-38)
и β = α + ρ , (7-39)
откуда
 .
(7-40)
.
(7-40)
Отметим, что σс.об является средним значением напряжения по поперечному сечению профиля. Действительные растягивающие напряжения в концентрических слоях профиля неодинаковы. Они зависят от расстояния слоя до оси профиля, определяемого положением бесконечно малой конической кольцевой поверхности, проходящей через точку δ, т.е. углом βδ, и отношением этой поверхности к её проекции на поперечное сечение профиля. Действительно, элементарная сила волочения dPδ, проходящая через площадку шарового сегмента AкBк в окрестности точки δ, создаёт после его поворота напряжение в соответствующей площадке плоского поперечного сечения профиля, равное
![]() .
(7-40а)
.
(7-40а)
Это напряжение увеличивается с удалением точки δ от оси к периферии, т.е. с увеличением угла βδ. Для периферийных слоёв βδ = α + ρ. Таким образом,
![]() . (7-40б)
. (7-40б)
Соответствующая эпюра действительных напряжений волочения по сечению профиля частично выравнивается по мере удаления от выхода из волочильного канала (рис.118).
Учёт сил трения в калибрующей зоне канала
Изложенные выводы, определяющие напряжения волочения, относятся лишь к обжимающей зоне волочильного канала. В действительности почти каждый волочильный канал имеет и калибрующую зону, на поверхности которой во время волочения возникают нормальные давления, и, следовательно, силы внешнего трения, препятствующие процессу. Эти силы должны быть уравновешены соответствующей долей общей силы волочения.
Чтобы определить рост напряжения волочения в результате действия сил трения в калибрующей зоне, необходимо знать величину нормального напряжения σn кал, возникающего на контактной поверхности этой зоны. Эта величина не постоянна. Она уменьшается от входа в калибрующую зону к выходу из неё в соответствии с обратным характером изменения напряжения волочения, которое повышается от входа к выходу. Закон изменения σn кал в калибрующей зоне неизвестен, однако можно с уверенностью сказать, что это напряжение не превышает то нормальное напряжение, при котором в калибрующей зоне могли бы возникнуть пластические деформации. Отсюда, принимая во внимание использованное ранее условие пластичности, можно
записать,
что ![]() ,
(7-41)
,
(7-41)
где Sтк – сопротивление деформации протягиваемого металла в состоянии выхода из обжимающей зоны канала; σlx кал – среднее значение растягивающего напряжения в калибрующей зоне канала в сечении, находящемся на расстоянии x от выхода (рис.119).
Ввиду неясности закона изменения σn кал в калибрующей зоне канала, расчёты приходится вести по максимально возможным значениям σn кал, т.е. приняв, что σn кал = σтк – σlx кал . (7-41а)
При таком допущении несколько завышается величина сил трения на контактной поверхности, однако, ввиду того, что длина калибрующей зоны волочильного канала сравнительно невелика, это завышение не может сильно исказить общие результаты.
На основании этого допущения и схемы сил и напряжений в калибрующей зоне (рис.119), составим уравнение равновесия сил, действующих на элементарный
объём
в этой зоне: ![]() ,
(7-42)
,
(7-42)
или ![]() .
(7-42а)
.
(7-42а)

Рис. 119. Силы и напряжения в калибрующей зоне волочильного канала
Принимая
во внимание уравнение(7-41), получаем
![]() .(7-43)
.(7-43)
Разделив
переменные и интегрируя,
![]() ,
(7-44)
,
(7-44)
откуда ![]() ,
(7-45)
,
(7-45)
или ![]() .
(7-46)
.
(7-46)
Постоянная интегрирования C определится граничным условием, по которому
при x
= lк
σlx
кал
= Kс.об, т.е.
![]() ,
(7-47)
,
(7-47)
а при x = 0 σlx кал = Kпол, где Kпол – полное напряжение волочения с учётом сил трения на калибрующем участке. Следовательно,
![]() .
(7-48)
.
(7-48)
Отсюда составляющая напряжения волочения, идущая на преодоление сил трения в калибрующей зоне канала, определится выражением
![]() . (7-49)
. (7-49)
Формула (7-49), предложенная П.Т.Емельяненко и Л.Е.Альшевским, показывает, что σкал растёт с увеличением длины калибрующей части lк и с уменьшением σс.об, т.к. при этом растёт σn кал, что правильно отражает влияние основных условий на напряжение волочения. Однако сложность техники вычислений по этой формуле не компенсируется точностью получаемых результатов и значимостью величины σкал. Поэтому И.Л.Перлин предложил более простой метод учёта сил трения в калибрующей части канала, условно названный «методом приведённого угла».
Сущность этого метода заключается в том, что силы, действующие на контактной поверхности, учитывают не по действительному, а по условному профилю канала, контактная поверхность которого представляет собой поверхность усеченного конуса высотой H (рис.120), равной сумме высот обжимающей h и калибрующей lк зон канала. Такая условность не только не вызывает каких-либо дополнительных неточностей по сравнению с формулой (7-49), но из-за уменьшения контактной поверхности, по сравнению с фактической, несколько компенсирует завышение σкал, внесённое допущением, что в калибрующей зоне канала выполняется условие пластичности. Величина угла наклона αп образующей условного (приведённого) профиля к оси канала определяется из следующих соотношений (рис.120):
![]() , (7-50)
, (7-50)
откуда ![]() , (7-51)
, (7-51)
или, т.к. длину калибрующей зоны часто выражают через конечный профиля,
lк = mDк , (7-52)
где
m = 0,1...1,5, то  .
(7-53)
.
(7-53)

Рис. 120. Учёт сил и напряжений в калибрующей части волочильного канала
Эта
ф-ла показывает, что длина калибрующей
зоны заметно влияет на tgαп,
особенно при небольших деформациях;
например, при m = 1, α
= 6º и μ
= 1,10 имеем tgαп
![]() 0,65 tgα. При
увеличении α это
влияние, а с ним и влияние длины
калибрующей зоны канала на силу волочения
возрастает. Это особенно следует
учитывать при расчётах, относящихся к
волочению профилей средних, тонких и
тончайших размеров, когда калибрующие
зоны канала отличаются значительной
длиной при сравнительно небольших
деформациях. Положительная сторона
применения приведённого угла αп –
возможность его экспериментального
определения. Для этого определяют общую
длину контактной поверхности H (рис.120),
что обычно не представляет трудностей;
между тем экспериментальное определение
lк,
особенно на волоках тончайших ,
может представлять большие трудности.
При использовании метода приведённого
угла следует иметь в виду, что замена
в формуле (7-40) угла α
на αп
не должна влиять на направления главных
продольных напряжений и величину их
поворотов у выхода из обжимающей части,
поэтому предлагаемая замена должна
быть проведена только в уравнении
равновесия (7-11) и, следовательно, только
в выражении (7-17), определяющем параметра
a.
0,65 tgα. При
увеличении α это
влияние, а с ним и влияние длины
калибрующей зоны канала на силу волочения
возрастает. Это особенно следует
учитывать при расчётах, относящихся к
волочению профилей средних, тонких и
тончайших размеров, когда калибрующие
зоны канала отличаются значительной
длиной при сравнительно небольших
деформациях. Положительная сторона
применения приведённого угла αп –
возможность его экспериментального
определения. Для этого определяют общую
длину контактной поверхности H (рис.120),
что обычно не представляет трудностей;
между тем экспериментальное определение
lк,
особенно на волоках тончайших ,
может представлять большие трудности.
При использовании метода приведённого
угла следует иметь в виду, что замена
в формуле (7-40) угла α
на αп
не должна влиять на направления главных
продольных напряжений и величину их
поворотов у выхода из обжимающей части,
поэтому предлагаемая замена должна
быть проведена только в уравнении
равновесия (7-11) и, следовательно, только
в выражении (7-17), определяющем параметра
a.
В
выражении (7-40) при определении параметра
 ,
такую замену делать нельзя.
,
такую замену делать нельзя.
Лекция 9
Величина продольного напряжения в начале пластической зоны
Для определения полного напряжения волочения Kпол необходимо знать напряжение σlq, возникающее на поверхности, ограничивающей зону начала пластических деформаций у входа в канал, т.е. на поверхности шарового сегмента AнBн (рис.117). По соображениям, аналогичным изложенным ранее,
![]() . (7-54)
. (7-54)
Напряжение σlq имеет минимум, отличный от нуля и зависящий от степени предварительной деформации протягиваемого металла и условий процесса (α и fn). При отсутствии внешнего противонатяжения этот минимум идёт на создание упругих деформаций, возникающих перед пластической зоной. При внешнем противонатяжении этот минимум остаётся неизменным до момента, когда напряжение противонатяжения достигает своей критической величины. При дальнейшем увеличении противонатяжения σlq, а с ним и напряжение волочения повышаются. Минимум σlq находят экспериментально для заданного состояния металла и условий процесса по величине критического противонатяжения, которое определяется моментом начала роста напряжения
волочения
(7-6): ![]() ,
(7-55)
,
(7-55)
где σl уп – напряжение, возникающее у входной границы зоны пластических деформаций при отсутствии внешнего противонатяжения или в тех случаях, когда напряжение внешнего противонатяжения не достигло своей критической величины; σq крит – критическое противонатяжение. Если σq > σq крит , то σlq определяется формулой (7-54).
Формула для определения полного напряжения волочения
На основании изложенного можно считать, что выражение, определяющее полное напряжение волочения σпол, получается из формулы (7-40) заменой в параметре a (7-17) угла α на приведенный угол αп и подстановки вместо σlq его значений, определяемых формулами (7-54) и (7-55).
Принимая
во внимание, что
 , в
окончательной записи σпол
определится выражением
, в
окончательной записи σпол
определится выражением
 ,
(7-56)
,
(7-56)
или ![]()
 ,
(7-56а)
,
(7-56а)
где σтс – среднее значение сопротивления деформации в пределах деформационной зоны;
![]() – параметр; fn и ρ –
коэффициент и угол трения;
– параметр; fn и ρ –
коэффициент и угол трения;
αп – приведенный угол; α – действительный угол образующей канала (полуугол); σq – напряжение противонатяжения, возникающее на задней поперечной границе пластической зоны, либо от действия внешнего противонатяжения σq внеш, либо от того и другого вместе. Это напряжение равно σq крит или больше него. Если σq внеш < σq крит , то sq = σq крит . Если σq внеш > σq крит , то σq = σq внеш .
Величина σq крит определяется из экспериментов (гл.6). При отсутствии данных эта величина приближённо может быть определена по следующей
эмпирической
формуле:
 , (7-57)
, (7-57)
где:
μσпред – общая вытяжка металла от последнего отжига (предварительная);
μσmax – возможная максимальная общая вытяжка от отжига до отжига;
σ0,2пред – условный предел текучести до волочения.
Формула (7-57) основана на том, что при μσmax равномерное удлинение при одноосном растяжении близко к нулю, т.е. на диаграммах деформация – условный предел прочности и деформация – условный предел текучести разность σв – σ0,2 становится минимальной.
Если σq внеш превышает предел текучести металла в его состоянии до входа в канал, что может быть при волочении малоупрочнённых металлов, следует учесть возможную внеконтактную деформацию от противонатяжения. Для этого по кривой зависимости сопротивления деформации от степени деформации определяют деформацию, вызванную напряжением σq внеш , а по ней, зная поперечное сечение полосы до волочения, определяют действительное сечение Fн полосы у входа в деформационную зону. В этом случае при определении σтс сопротивлением деформации, соответствующим состоянию металла в начале деформационной зоны, будет σq. Для облегчения расчётов в табл.17 и табл.18 приведены значения
параметров
 и
a.
Согласно формуле (2-11),
и
a.
Согласно формуле (2-11),
ctgαп max = fn = tgρ (7-58)
и соответственно из формулы (7-17) amax = cos2ρ (1 + tg2ρ) – 1. (7-59)
Значения
параметра  .
Т а б л и ц а 1 7.
.
Т а б л и ц а 1 7.
α + ρ (º) |
|
α + ρ (º) |
|
α + ρ (º) |
|
0 |
1,00 |
25 |
1,06 |
50 |
1,19 |
5 |
1,01 |
30 |
1,08 |
60 |
1,30 |
10 |
1,015 |
35 |
1,10 |
70 |
1,50 |
15 |
1,02 |
40 |
1,12 |
80 |
1,70 |
20 |
1,04 |
45 |
1,15 |
90 |
2,00 |
Т а б л и ц а 1 8.
Значения параметра a = cos2ρ (1 + tgρ ctgαп) - 1
tg ρ = fn |
Значения коэффициента а при αп (º) |
|||||||
1 |
2 |
4 |
5 |
6 |
7 |
8 |
9 |
|
0,03 |
1,7 |
0,8 |
0,43 |
0,286 |
0,17 |
0,11 |
0,082 |
0,064 |
0,05 |
2,9 |
1,34 |
0,7 |
0,47 |
0,27 |
0,18 |
0,134 |
0,11 |
0,075 |
4,3 |
2,0 |
1,06 |
0,70 |
0,42 |
0,26 |
0,20 |
0,16 |
0,10 |
5,68 |
2,64 |
1,4 |
0,93 |
0,55 |
0,36 |
0,26 |
0,21 |
0,15 |
8,43 |
3,96 |
2,10 |
1,40 |
0,83 |
0,52 |
0,40 |
0,32 |
0,20 |
10,9 |
5,05 |
2,70 |
1,80 |
1,05 |
0,68 |
0,50 |
0,38 |