

Исследовательская часть
Путём
варьирования параметра
,
найдём его оптимальное значение
 ,
при котором перерегулирование
,
при котором перерегулирование
 в переходном процессе замкнутой системы
минимально.
в переходном процессе замкнутой системы
минимально.
Переходный
процесс, — по определению, — реакция
системы на единичное ступенчатое входное
воздействия. Для построения графика
переходного процесса необходимо умножить
передаточную функцию (3.15) замкнутой
системы на величину
 (подача единичного ступенчатого входного
воздействия) и применить к полученному
выражению обратное преобразование
Лапласа. В результате мы получим значение
выходного сигнала
(подача единичного ступенчатого входного
воздействия) и применить к полученному
выражению обратное преобразование
Лапласа. В результате мы получим значение
выходного сигнала
 ,
— реакцию системы, — как функцию времени.
Сделаем это:
,
— реакцию системы, — как функцию времени.
Сделаем это:
 ,
откуда после расчёта:
,
откуда после расчёта:
 (3.16)
(3.16)
Выражение
(3.16) получено при условии отсутствия
внешнего возмущения ( ).
).
Построим
график переходного процесса замкнутой
системы (график функции
 ,
описываемой выражением (3.16)) при 10
экспериментальных значениях
:
от 23 до 32 с шагом 1. В предположении, что
к десятой секунде переходный процесс
устоится, для каждого (
,
описываемой выражением (3.16)) при 10
экспериментальных значениях
:
от 23 до 32 с шагом 1. В предположении, что
к десятой секунде переходный процесс
устоится, для каждого ( -того)
полученного графика определим
перерегулирование
как
-того)
полученного графика определим
перерегулирование
как
 ,
итак:
,
итак:
XВЫХ
t
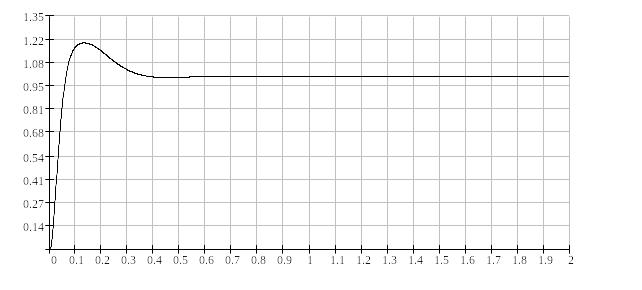
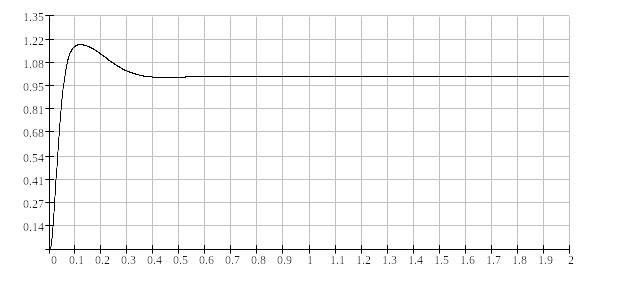
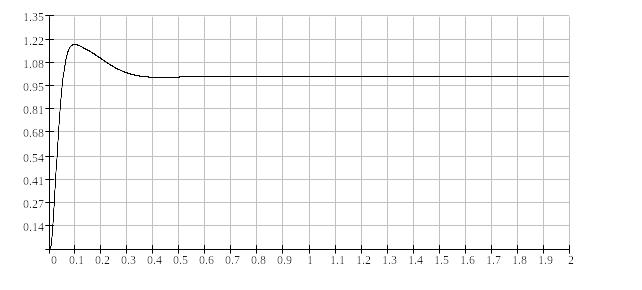
Рисунок
3.2:
Переходный процесс замкнутой системы
при
 .
.
 ,
,
 ,
,

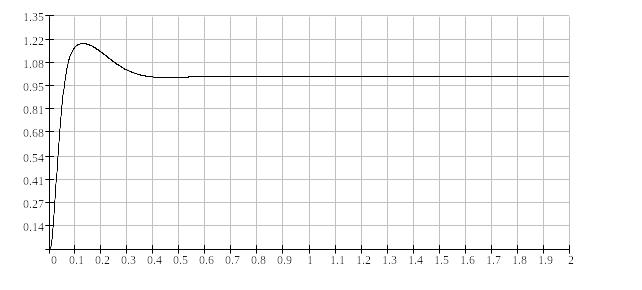
XВЫХ
t
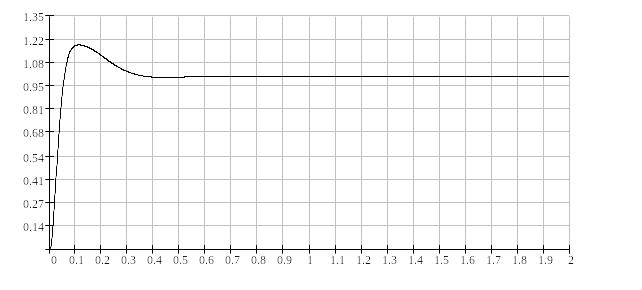
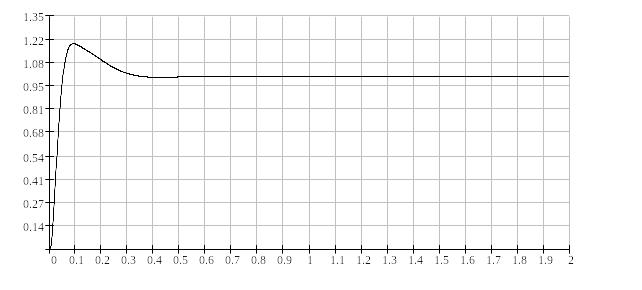
Рисунок
3.3:
Переходный процесс замкнутой системы
при
 .
.
 ,
,
 ,
,
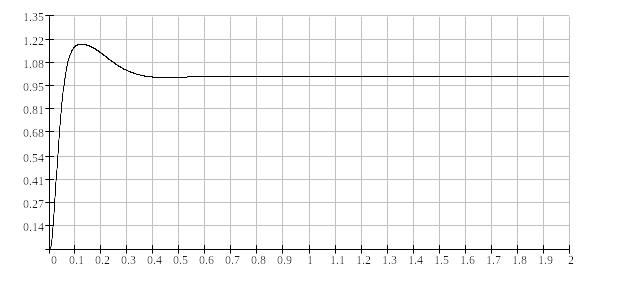
XВЫХ
t
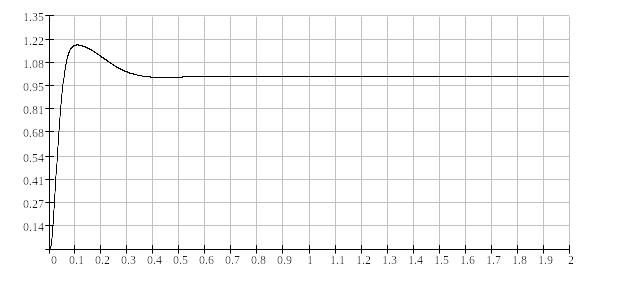
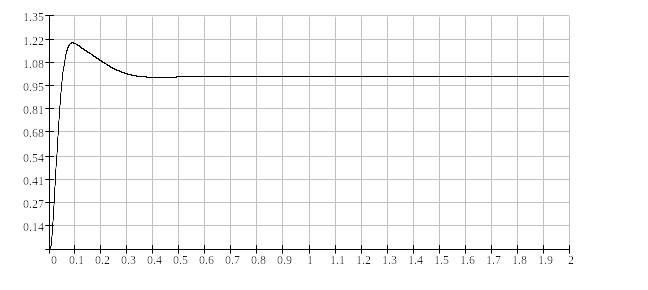
Рисунок
3.4:
Переходный процесс замкнутой системы
при
 .
.
 ,
,
 ,
,

XВЫХ
t
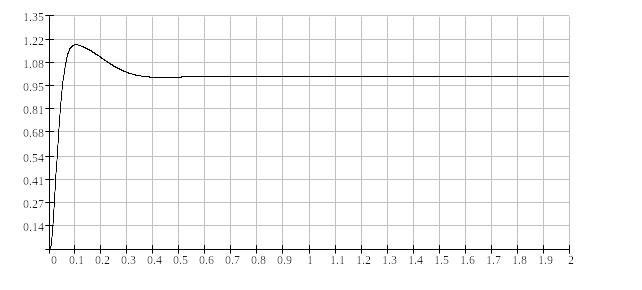
Рисунок
3.5:
Переходный процесс замкнутой системы
при
 .
.
 ,
,
 ,
,
XВЫХ
t
Рисунок
3.6:
Переходный процесс замкнутой системы
при
 .
.
 ,
,
 ,
,

XВЫХ
t
Рисунок
3.7:
Переходный процесс замкнутой системы
при
 .
.
 ,
,
 ,
,
XВЫХ
t
Рисунок
3.8:
Переходный процесс замкнутой системы
при
 .
.
 ,
,
 ,
,

XВЫХ
t
Рисунок
3.9:
Переходный процесс замкнутой системы
при
 .
.
 ,
,
 ,
,
XВЫХ
t
Рисунок
3.10:
Переходный процесс замкнутой системы
при
 .
.
 ,
,
 ,
,
XВЫХ
t
Рисунок
3.11:
Переходный процесс замкнутой системы
при
 .
.
 ,
,
 ,
,

При
всех рассмотренных значениях
 устоявшееся значение переходного
процесса
устоявшееся значение переходного
процесса
 ,
т.к. входное воздействие является
единичным ступенчатым, и, как видно из
(3.16),
,
т.к. входное воздействие является
единичным ступенчатым, и, как видно из
(3.16),
 .
.
Сведём полученные значения перерегулирования в таблицу:
-

23
24
25
26
27
28
29
30
31
32

0.193
0.189
0.186
0.183
0.18176
0.18152
0.183
0.185
0.189
0.194
Таблица
3.1:
Экспериментальная зависимость

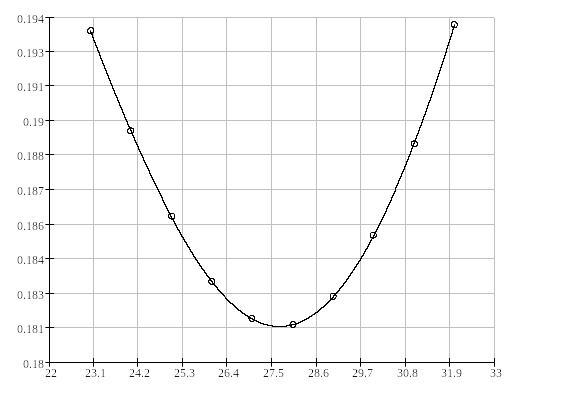
Обозначив
данные точки на плоскости
 ,
построим по ним аппроксимирующую функцию
,
построим по ним аппроксимирующую функцию
 :
:
σ
g2
Рисунок
3.12:
Экспериментальная и аппроксимирующая
её зависимости
 .
.
Минимизируя полученную функцию , находим оптимальное значение параметра равным
 (3.18)
(3.18)
Подставляя (3.18) в (3.14) и (3.15), получаем вид оптимальных передаточных функций фильтра и замкнутой системы:
 ; (3.19)
; (3.19)
 . (3.20)
. (3.20)