

Московский ордена Ленина, ордена Октябрьской Революции
И ордена Трудового Красного Знамени.
Государственный технический университет им. Н. Э. Баумана
______________________________________________________________________________
Курсовая работа
Разработка цифровой системы управления
Для аналогового объекта По предмету: Основы теории управления_________________
Студент: иу3-72
Руководитель: Боевкин В.И.
Вариант: 12
Москва
2003
Москва
2007

По предмету: Основы теории управления_________________ 1
Студент: ИУ3-72 1
1 Цель работы 3
2 Техническое задание 4
2.1 Назначение системы управления 4
2.2 Структурная схема системы управления 4
2.3 Исходные данные 4
2.4 Динамические требования к системе управления 4
2.5 Метод перехода от аналогового фильтра к цифровому 5
3 Проектирование аналоговой системы управления 5
3.1 Теоретическая часть 5
3.2 Исследовательская часть 7
3.2.1 Исследование реакции системы на внешнее возмущение 14
3.3 Расчётно-графическая часть 16
3.3.1 Переходный процесс в замкнутой системе 16
3.3.2 Переходный процесс в фильтре 19
4 Проектирование цифровой системы управления 22
4.1 Проектирование цифрового фильтра 22
4.1.1 Общее 22
4.1.2 Для интерполяционного метода 26
4.1.3 Для экстраполяционного метода 29
4.2 Замкнутая система с цифровым фильтром 31
4.3 Выбор шага дискретизации 32
4.4 Влияние запаздывания 40
5 Выводы 48
6 Список использованной литературы 49
Цель работы
Спроектировать цифровую систему управления с заданным быстродействием для объекта с известной передаточной функцией.
Техническое задание
Назначение системы управления
Система
предназначена для отслеживания входного
сигнала
 и компенсации внешнего возмущения
и компенсации внешнего возмущения
 .
.
Структурная схема системы управления
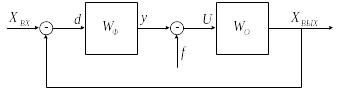
Рисунок 2.1: Структурная схема системы управления.
Исходные данные
Передаточная функция объекта:
 ,
где:
,
где:
 .
.
Передаточная функция фильтра:
 .
.
Динамические требования к системе управления
Длительность переходного процесса:

Степень устойчивости системы:
 .
.
Характеристическое уравнение замкнутой системы:
 ,
где:
,
где:
 — уравнение
главных корней,
— уравнение
главных корней,
 — уравнение
дополнительных корней,
— уравнение
дополнительных корней,
 .
.
Метод перехода от аналогового фильтра к цифровому
Полуаналитический с вычислением производных по входу:
интерполяционным методом:

и
экстраполяционным методом:

Проектирование аналоговой системы управления
Теоретическая часть
Найдём параметры аналогового фильтра.
Передаточная функция фильтра, выраженная через физические параметры:
. (3.1)
Передаточная функция объекта, выраженная через физические параметры:
. (3.2)
Найдём передаточную функцию разомкнутой системы как произведение передаточных функций объекта и фильтра:
 . (3.3)
. (3.3)
Подставляя (3.1) и (3.2) в (3.3), получаем передаточную функцию разомкнутой системы, выраженную через физические параметры:
 . (3.4)
. (3.4)
Передаточная функция замкнутой системы определяется из передаточной функции разомкнутой системы как:
 . (3.5)
. (3.5)
Подставляя (3.4) в (3.5), получаем передаточную функцию замкнутой системы, выраженную через физические параметры:
 ,
откуда после упрощения:
,
откуда после упрощения:
 . (3.6)
. (3.6)
Знаменатель полученного выражения является характеристическим уравнением замкнутой системы, выраженным через физические параметры:
 . (3.7)
. (3.7)
С другой стороны, характеристическое уравнение замкнутой системы можно выразить через желаемые корни:
. (3.8)
Здесь уравнение главных корней имеет вид:
. (3.9)
А уравнение дополнительных корней имеет вид:
. (3.10)
Подставляя (3.9) и (3.10) в (3.8), получаем:
 ,
откуда после упрощения:
,
откуда после упрощения:
 . (3.11)
. (3.11)
Приравнивая коэффициенты при одинаковых степенях правых частей уравнений (3.7) и (3.11), получаем систему:
 (3.12)
(3.12)
В
этой системе 3 известных нам величины
(в техническом задании заданы:
 ,
,
 ,
)
и 5 неизвестных (физические параметры
фильтра:
,
)
и 5 неизвестных (физические параметры
фильтра:
 ,
,
 ,
,
 ,
,
 ,
,
 ).
Т.к. в системе 4 уравнения, найти мы можем
лишь 4 из 5и
неизвестных величин, а оставшуюся, —
пусть это будет параметр
,
— мы будем варьировать.
).
Т.к. в системе 4 уравнения, найти мы можем
лишь 4 из 5и
неизвестных величин, а оставшуюся, —
пусть это будет параметр
,
— мы будем варьировать.
Решая систему (3.12), находим:
 (3.13)
(3.13)
Подставляя (3.13) в (3.1) и (3.6), получаем передаточные функции фильтра и замкнутой системы зависящими от параметра :
 , (3.14)
, (3.14)
 . (3.15)
. (3.15)