1.2. Понятие определителя
Определитель вводят для квадратных матриц. Порядок определителя совпадает с порядком матрицы. Определитель матрицы А обозначают А, det A, Δ, …
Для матрицы первого порядка А = (а11) определитель (первого порядка) равен А = а11.
Для матрицы второго
порядка определитель (второго порядка)
равен
![]()
Для матрицы третьего порядка определитель (третьего порядка) равен
![]() (2)
(2)
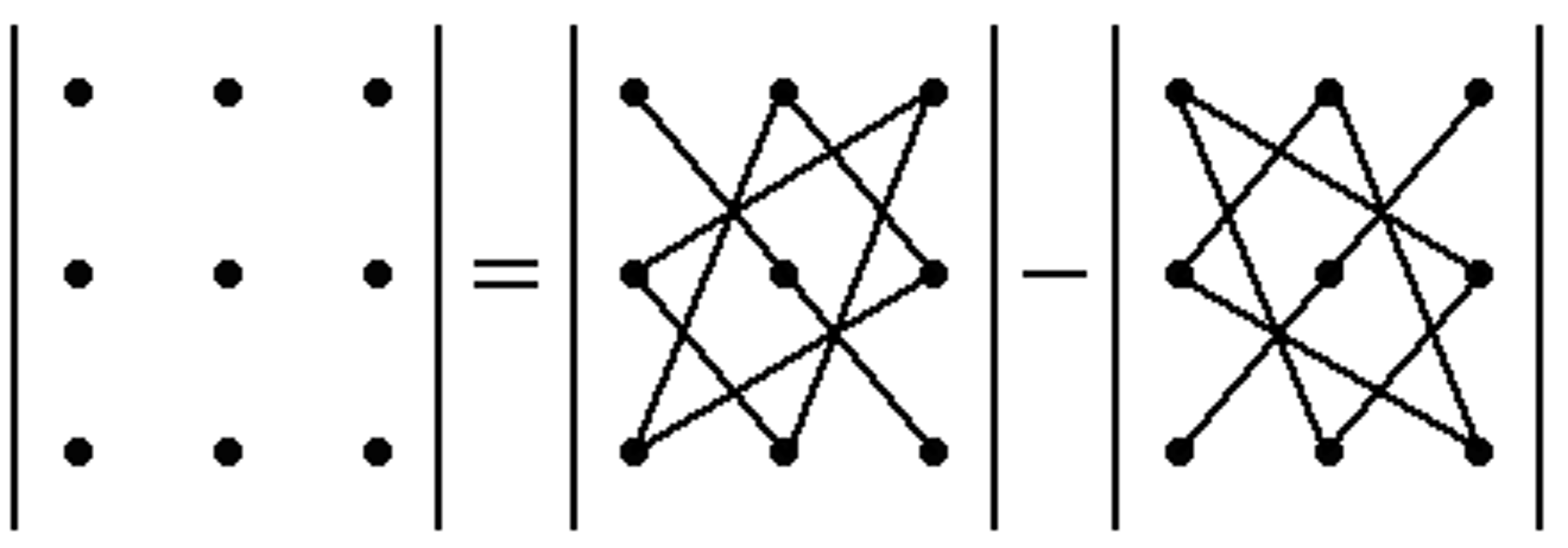
Это правило называют правилом треугольников или правилом Саррюса. Его можно изобразить схематически следующим образом:
Пример 3. Вычислим по правилу (2) определитель:

Кроме правила треугольников, в практике используют еще один простой способ вычисления определителей, который вытекает из теоремы Лапласа. Этим способом можно вычислять определители любого порядка. Для этого способа нам потребуются минор и алгебраическое дополнение элемента.
Определение 3. Минором Мik элемента aik определителя любого порядка называют новый определитель, который получается из данного после вычеркивания i-й строки и k-го столбца. Например, для определителя
 (3)
(3)
минорами элементов а11, а12, … будут соответственно определители

Очевидно, что порядок минора на единицу меньше порядка исходного определителя.
Определение 4. Алгебраическим дополнением Аik элемента аik определителя называют
Aik = (–1)i + kMik.
Например, для определителя Δ из (3)
А11 = (–1)1 + 1М11 = М11, А12 = (–1)1 + 2М12 = –М12.
Теорема Лапласа. Сумма произведений элементов какой-либо строки или столбца определителя на соответствующие алгебраические дополнения равна определителю .
Эту теорему используют для вычисления определителей. Например, выбрав в определителе (3) первую строку, получим
 .
(4)
.
(4)
Формулу (4) называют разложением определителя по элементам первой строки. Вместо первой строки можно брать любую другую строку или любой столбец определителя.
Пример 4. Вычислим определитель из примера 3 по формуле (4).
Результат, разумеется, тот же, что и в примере 3.
Замечание. При вычислении определителя с помощью теоремы Лапласа обычно выбирают ту строку или столбец, где имеются нули. При этом нули можно получать искусственно с помощью свойств определителей [2, гл. I, п. 2.2].
1.3. Решение систем линейных уравнений
Рассмотрим систему 3-х линейных уравнений с тремя неизвестными:
![]() (5)
(5)
Решением системы (5) называют упорядоченную тройку чисел x = α, y = β, z = γ, удовлетворяющих всем уравнениям системы. Система (5) может не иметь решений, может иметь одно или бесконечное множество решений. Существует достаточное число способов отыскания решений системы (5). Мы рассмотрим два из них: метод Крамера и метод Гаусса. Для метода Крамера надо ввести главный определитель системы. Он имеет вид (3). Если Δ ≠ 0, то система (5) имеет единственное решение, которое определяется по формулам Крамера:
![]() (6)
(6)
где
|
(7) |

Пример 5 [1, к задачам № 11-20]. Решить по формулам Крамера систему линейных уравнений.
![]() (8)
(8)
Решение
Вычислим главный определитель системы
т.к. Δ ≠ 0, то система имеет единственное решение.
Вычислим определители Δx, Δy, Δz по формулам (7):
По формулам Крамера (6) находим:
![]()
Ответ: x = 1; y = 2; z = 3.
Рассмотрим теперь метод последовательного исключения неизвестных, или метод Гаусса [2, гл. I, п. 4.4]. Исключение неизвестных осуществляется с помощью равносильных действий над уравнениями системы. Этим методом система (5) преобразуется в равносильную систему треугольного вида:
После этого из третьего уравнения находим z, из второго — y, из первого — x.
Пример 6. Решить методом Гаусса систему уравнений (8).
Решение
Поменяем местами первое и третье уравнения:
Умножим все члены первого уравнения системы на (–3) и прибавим ко второму, получим систему
![]()
![]()
Теперь умножим все члены первого уравнения на (–2) и прибавим к третьему, получим систему
![]()
Разделим все члены второго уравнения на 5 (коэффициент при y):
![]()
Умножим второе уравнение на (–3) и прибавим к третьему уравнению. Тогда получим систему
![]()
из которой последовательно находим
Ответ: x = 1, y = 2, z = 3.
Как видим, оба метода дают один и тот же результат.
Замечание. Методом Гаусса можно решать линейную систему при любом числе уравнений, а также и в случае, когда ее определитель равен нулю и когда число уравнений не совпадает с числом неизвестных.
Контрольные вопросы
1. Матрицы и их виды.
2. Действия над матрицами.
3. Определители второго и третьего порядков, их свойства.
4. Понятие минора и алгебраического дополнения. Разложение определителя по элементам строки или столбца.
5. Общие сведения о системах линейных уравнений.
6. Методы решения систем линейных уравнений.
2. Элементы векторной алгебры
В векторной алгебре [2, гл. II] выделяют три наиболее важных вопроса:
1) понятие и виды векторов;
2) действия над векторами;
3) применения векторов.
Для удобства представим необходимые сведения по этим вопросам в виде таблиц 1-3.
2.1. Понятие вектора, виды векторов
Таблица 1
Основные определения
Название |
Определение |
Обозначение |
1 |
2 |
3 |
1. Вектор |
Направленный отрезок от точки А до точки В |
|
2. Длина (модуль) вектора |
Длина отрезка |
|
3. Орт данного направления |
|
|
4. Нулевой вектор |
Начало совпадает с концом (точка) |
|
5. Угол между векторами |
|
|
6. Перпендикулярные векторы |
|
|
Продолжение таблицы 1
1 |
2 |
3 |
7. Коллинеарные векторы |
Лежат на одной или на параллельных прямых |
|
8. Сонаправленные векторы |
Коллинеарны и имеют одинаковое направление |
|
9. Антинаправленные векторы |
Коллинеарны и направлены в противоположные стороны |
|
10. Равные векторы |
|
|
11. Противоположные векторы |
|
|
12. Компланарные векторы |
Лежат в одной или нескольких параллельных плоскостях |
|
13.
Правая тройка
некомпланарных
векторов
|
1) начала векторов совмещены;
2)
кратчайший поворот
от
|
|
Примечание. Если кратчайший поворот от к виден из конца совершающимся в отрицательном направлении, т.е. по движению часовой стрелки, то тройку векторов называют левой.
|
||