

3.5. Уравнения и характеристики типовых динамических звеньев
При анализе типовых динамических звеньев необходимо рассматривать: дифференциальное уравнение; передаточную функцию; временные характеристики; частотные характеристики; логарифмические частотные характеристики.
В качестве примера рассмотрим уравнения и характеристики апериодического звена первого порядка:
1. Дифференциальное уравнение
![]() ,
(3.33)
,
(3.33)
где k – коэффициент передачи; T – постоянная времени.
2. Передаточная функция
![]() .
(3.34)
.
(3.34)
3. Переходная функция апериодического звена первого порядка описывается выражением:
![]() .
(3.35)
.
(3.35)
Переходная характеристика апериодического звена первого порядка приведена на рис. 3.12.
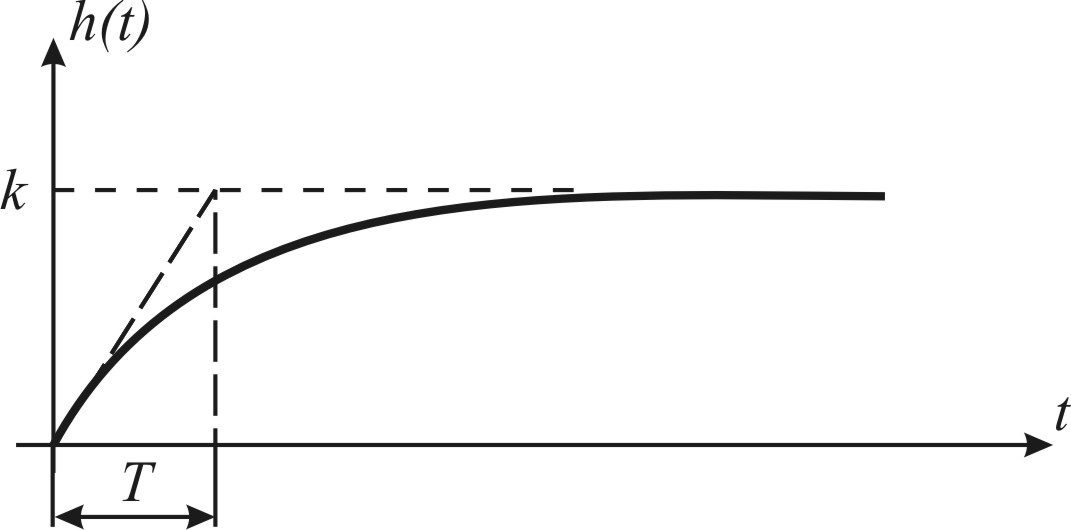
Рис. 3.12. Переходная характеристика апериодического звена первого порядка
4. Весовая функция апериодического звена первого порядка описывается выражением:
![]() .
(3.36)
.
(3.36)
Весовая характеристика апериодического звена первого порядка приведена на рис. 3.13.
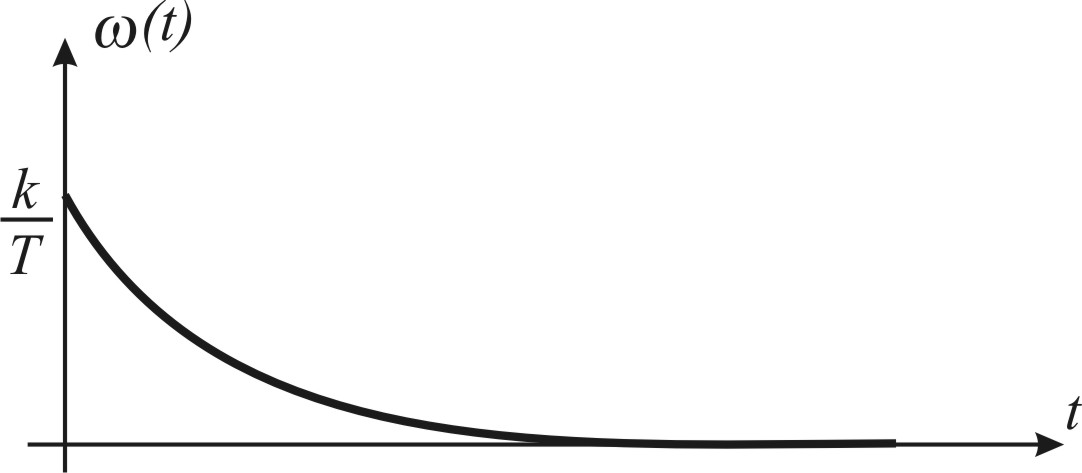
Рис. 3.13. Весовая характеристика апериодического звена первого порядка
5. Частотная передаточная функция апериодического звена первого порядка имеет вид
![]() .
(3.37)
.
(3.37)
Амплитудно-фазовая частотная характеристика (АФЧХ) апериодического звена первого порядка приведена на рис. 3.14.
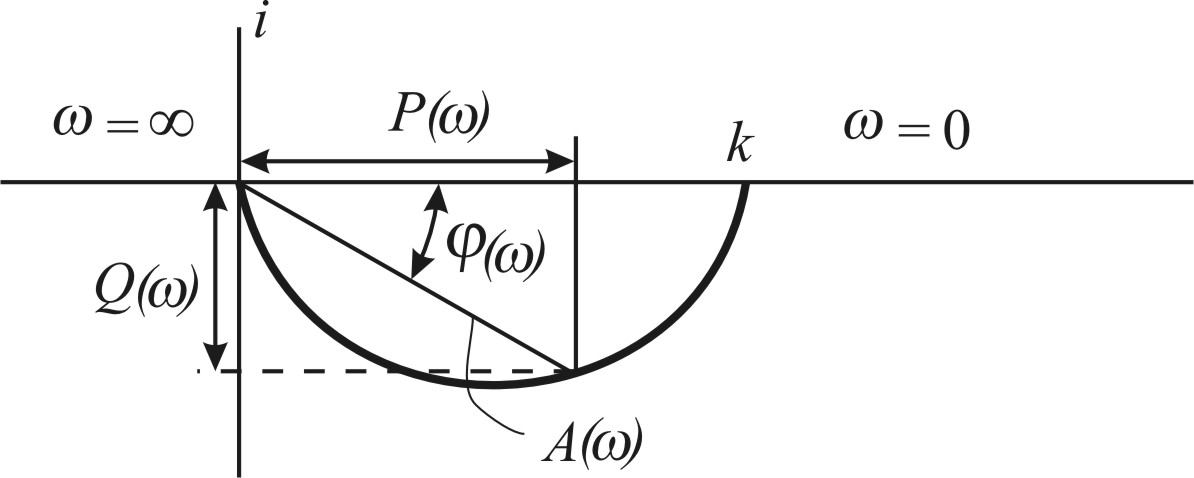
Рис. 3.14. Амплитудно-фазовая частотная характеристика апериодического звена первого порядка
Остальные частотные функции апериодического звена первого порядка определяются выражениями:
- амплитудно-частотная функция
![]() ;
;
- фазовая частотная функция
![]() ;
;
- вещественная частотная функция
![]() ;
;
- мнимая частотная функция
![]() .
.
6. Логарифмическая амплитудно-частотная функция апериодического звена первого порядка описывается выражением
![]() (3.38)
(3.38)
а ЛАЧХ приведена на рис. 3.15.
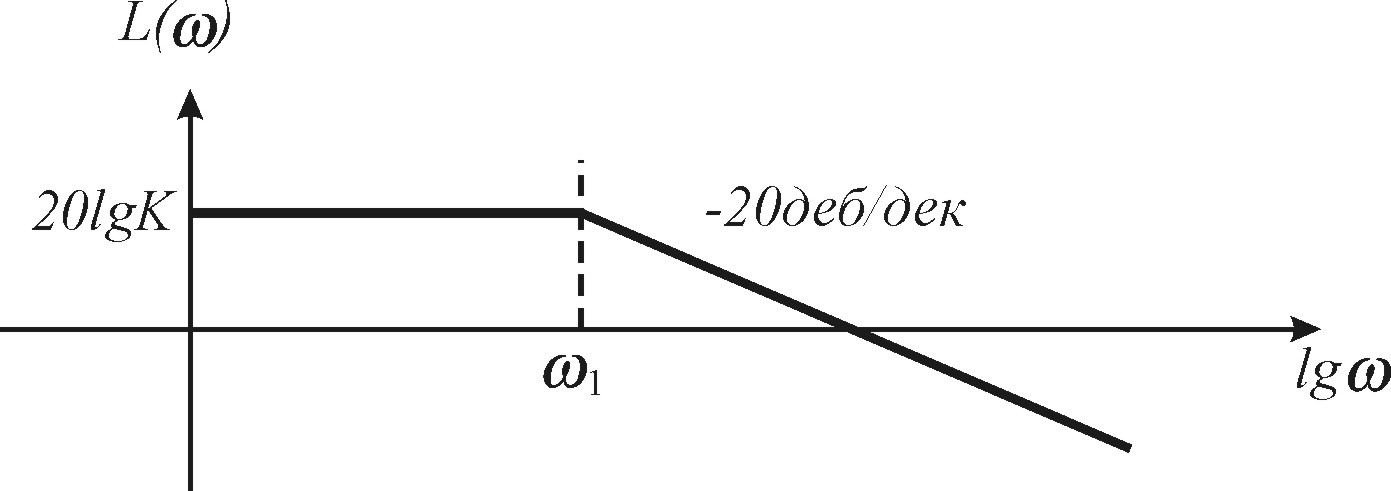
Рис. 3.15. ЛАЧХ апериодического звена первого порядка
7. Логарифмическая фазовая частотная функция апериодического звена первого порядка описывается выражением
, (3.39)
а ЛФЧХ приведена на рис. 3.16.

Рис. 3.16. ЛФЧХ апериодического звена первого порядка
3.6. Интегро-дифференцирующие звенья
Кроме рассмотренных выше типовых динамических звеньев выделяют также интегро-дифференцирующие звенья с передаточной функцией
![]() ,
(3.40)
,
(3.40)
где B(p), A(p) – нормированные полиномы от p первого или второго порядков. В зависимости от вида полиномов и значений их коэффициентов эти звенья в одних диапазонах частот проявляют интегрирующие, а в других диапазонах частот - дифференцирующие свойства. Такие звенья широко используются в качестве корректирующих звеньев.
Все типовые динамические звенья делятся на минимально-фазовые и неминимально-фазовые звенья.
Звено называется минимально-фазовым, если все нули и полюсы его передаточной функции имеют отрицательные или равные нулю вещественные части. Звено называется неминимально-фазовым, если хотя бы один нуль или полюс его передаточной функции имеет положительную вещественную часть.
Все рассмотренные выше типовые динамические звенья являются минимально-фазовыми, кроме звена чистого запаздывания.