

ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
1. ПРИНЦИПЫ ПОСТРОЕНИЯ И КЛАССИФИКАЦИЯ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
-
Основные понятия и определения теории
автоматического управления
Алгоритм – всякое правило или предписание, устанавливающее порядок выполнения тех или иных операций. Операции могут выполняться человеком или техническими устройствами, например ЭВМ. Алгоритм должен обладать следующими свойствами:
- определенностью, т.е. достаточной формализованностью, строгостью и общепонятностью;
- массовостью, т.е. гарантируется возможность применения алгоритма для решения нескольких задач одного класса;
- результативностью, т.е. обеспечивается получение искомого результата после выполнения конечного числа элементарных операций.
Оператор – совокупность математических и логических действий, в результате которых по заданной функции определяется другая функция, т.е. оператор устанавливает соответствие между функциями.
Алгоритм функционирования устройства (системы) – совокупность предписаний, ведущих к правильному выполнению технического (технологического) процесса в каком-либо устройстве или в совокупности устройств (системе).
Объект управления – устройство (совокупность устройств), осуществляющее технический процесс и нуждающееся в специально организованных воздействиях извне для выполнения его алгоритма функционирования.
Алгоритм управления – совокупность предписаний, определяющих характер воздействий извне на объект управления с целью осуществления его алгоритма функционирования.
Управление (процесс управления) – процесс осуществления воздействий, соответствующих алгоритму управления.
Управляющее устройство – устройство, осуществляющее в соответствии с алгоритмом управления воздействия на объект управления. Алгоритм функционирования устройства управления представляет собой алгоритм управления.
Система автоматического управления (САУ) – совокупность объекта управления и автоматического устройства управления, взаимодействующих между собой.
1.2. Представление технических объектов как объектов управления
Технический объект – с точки зрения управления представлен на рис.1.1.
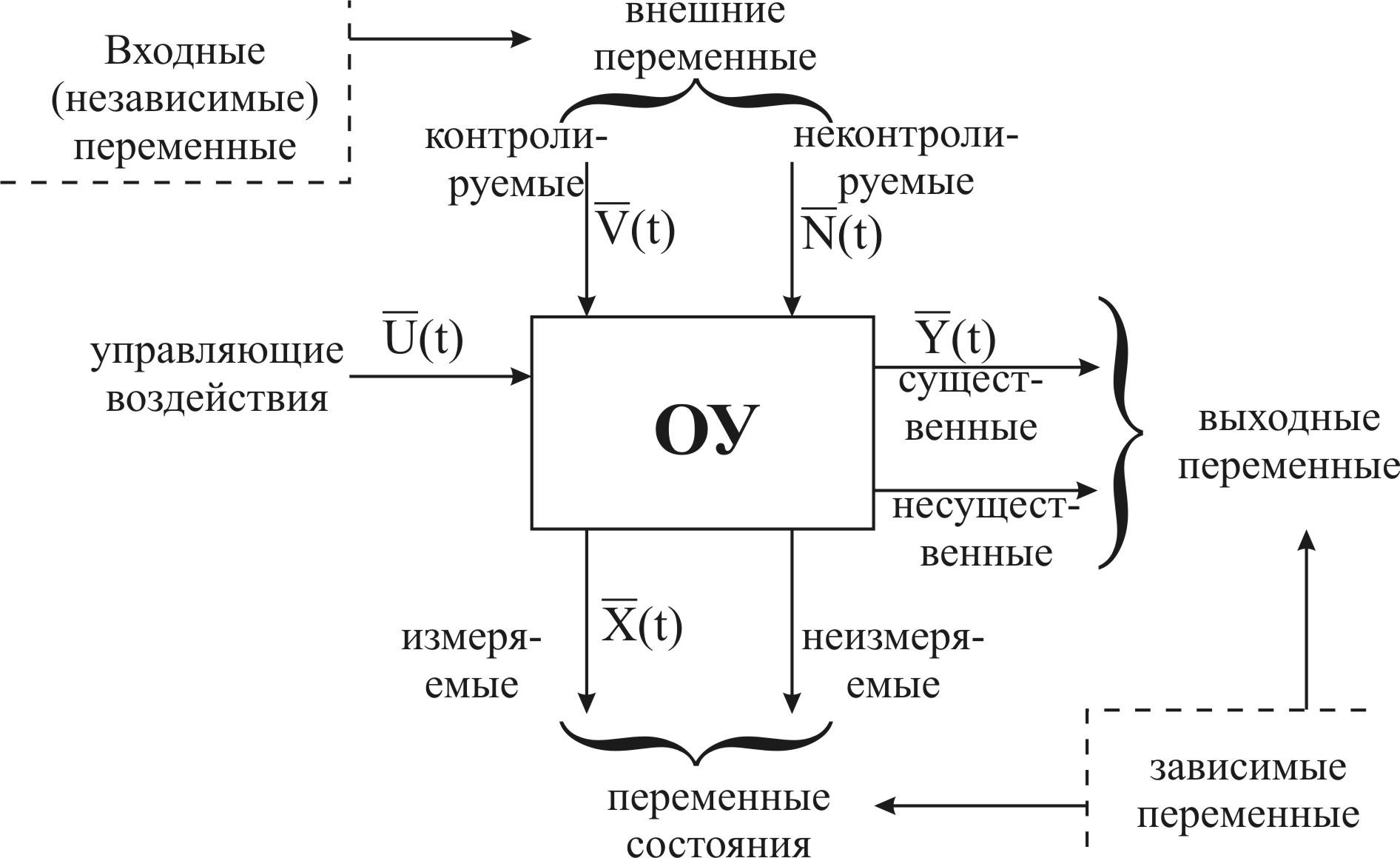
Рис. 1.1. Технический объект с точки зрения управления.
Физические величины, характеризующие ход технологического процесса и состояние технологического оборудования называются параметрами (переменными) объекта управления.
Переменные, характеризующие технический объект и процессы, происходящие в нем, делятся на входные (независимые) и зависимые переменные.
К входным переменным относятся:
- управляющие воздействия – переменные, с помощью которых устройство управления осуществляет управление объектом:
![]() ,
,
где k – общее число управляющих воздействий;
- контролируемые внешние переменные – измеряемые входные переменные, с учетом которых вырабатываются управляющие воздействия:
![]() ,
,
где l – общее число контролируемых переменных;
- неконтролируемые входные переменные N(t) – входные переменные, влияющие на течение технологического процесса, но не измеряемые.
Зависимые переменные делятся на переменные состояния и выходные переменные.
Переменные
состояния
– важные промежуточные переменные
протекания процесса, не являющиеся
непосредственно выходными. Эти переменные
обычно измеряются частично. Неизмеряемые
переменные состояния при необходимости
определяются расчетным путем, а измеряемые
![]() используются для выработки управляющих
воздействий:
используются для выработки управляющих
воздействий:
![]() ,
,
где р – общее число переменных состояния.
Выходные переменные (существенные для конкретной задачи) характеризуют результат ведения процесса. Выходные переменные также называются целевыми или управляемыми:
![]() ,
,
где т – общее число целевых переменных.
Технический объект как объект управления представлен на рис. 1.2.
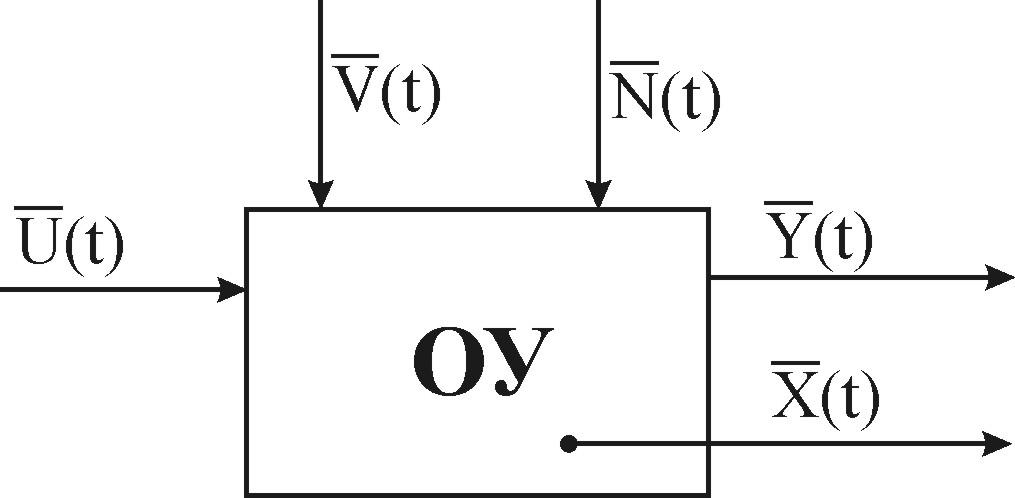
Рис. 1.2. Технический объект как объект управления
1.3. Принципы управления
В основе построения САУ лежат некоторые фундаментальные принципы управления, определяющие, каким образом, осуществляется увязка алгоритмов управления с заданным и фактическим функционированием объекта управления, а иногда и с причинами, вызвавшими отклонение.
В ТАУ, в основном, используются следующие принципы:
- принцип разомкнутого управления (управление по жесткой программе);
- принцип управления по возмущению (принцип компенсации);
- принцип управления по отклонению (принцип обратной связи);
- комбинированный принцип управления.
1.3.1. Принцип разомкнутого управления
Принцип разомкнутого управления является самым простым и достаточно распространенным в технических системах. Схема САУ, реализующей данный принцип приведена на рис.1.3.

Рис. 1.3. Схема САУ, реализующей принцип разомкнутого управления.
Сущность
принципа разомкнутого управления
состоит в том, что алгоритм управления
строится только на основе заданного
алгоритма функционирования и не
контролируется по фактическому значению
управляемой переменной. На рис. 1.3.
приняты следующие обозначения: ЗАФ –
за датчик алгоритма функционирования,
УУ – устройство управления;
![]() - задающее воздействие, характеризующее
планируемое воздействие на вход САУ.
Устройство управления приводится в
действие за датчиком алгоритма
функционирования сигналом
- задающее воздействие, характеризующее
планируемое воздействие на вход САУ.
Устройство управления приводится в
действие за датчиком алгоритма
функционирования сигналом
![]() и воздействует на объект управления
сигналом
и воздействует на объект управления
сигналом
![]() так, чтобы значение управляемой переменной
y(t) было равным или близким к заданному
значению
так, чтобы значение управляемой переменной
y(t) было равным или близким к заданному
значению
![]() .
Близость y(t) и
.
Близость y(t) и
![]() обеспечивается жесткостью характеристик
системы. При наличии значительных
возмущений n(t) величина y(t) может
значительно отклониться от y*(t). В этом
случае управление станет не пригодным
и необходимо переходить к другим
принципам управления. Принцип разомкнутого
управления иногда называют принципом
управления по жесткой программе. САУ,
реализующие принцип разомкнутого
управления относятся к разомкнутым
системам управления.
обеспечивается жесткостью характеристик
системы. При наличии значительных
возмущений n(t) величина y(t) может
значительно отклониться от y*(t). В этом
случае управление станет не пригодным
и необходимо переходить к другим
принципам управления. Принцип разомкнутого
управления иногда называют принципом
управления по жесткой программе. САУ,
реализующие принцип разомкнутого
управления относятся к разомкнутым
системам управления.