

1.3.4. Комбинированный принцип управления
Учитывая достоинства и недостатки рассмотренных принципов управления, на практике широко используется комбинированный принцип управления, сочетающий в себе оба принципа. Схема САУ на основе комбинированного принципа управления приведена на рис. 1.6, для которой алгоритм управления имеет вид:
![]() .
(1.7)
.
(1.7)
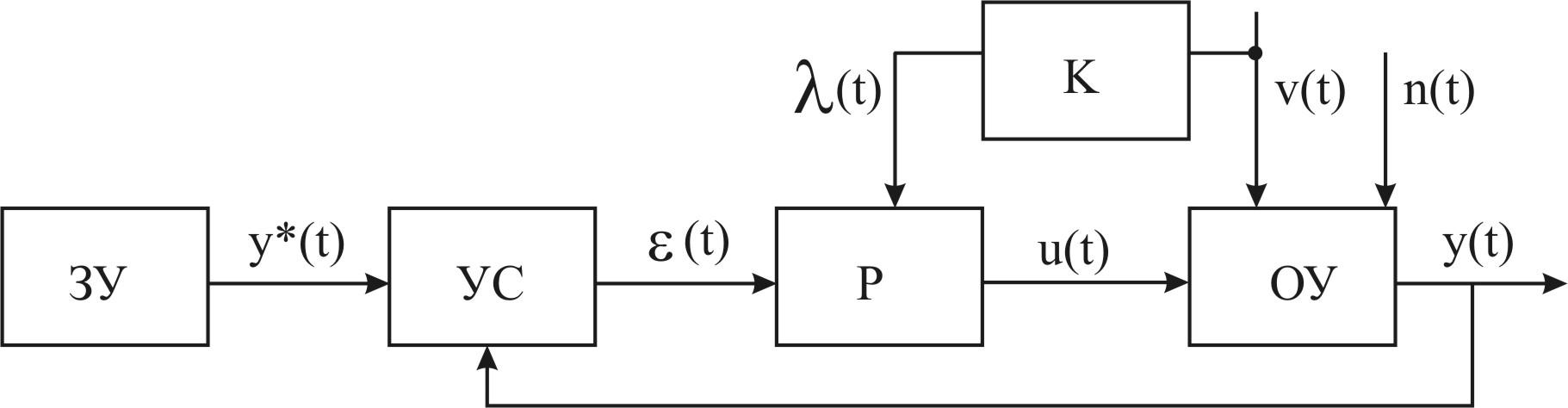
Рис. 1.6. Схема САУ на основе комбинированного принципа управления
САУ с комбинированным принципом управления также является замкнутой.
1.4. Функциональные схемы систем автоматического управления
Несмотря на многообразие САУ и входящих в них элементов, последние могут быть сведены к нескольким основным типам, различающимся по назначению и взаимодействию в системе управления. Наглядное представление об элементах, входящих в САУ, дают функциональные схемы.
Функциональные схемы САУ показывают, из каких элементов по функциональному значению состоят системы управления.
Обобщенная функциональная схема САУ приведена на рис. 1.7.
Объект управления принципиально отличается от остальных элементов САУ тем, что он обычно задан и при разработке системы управления не может быть изменен, тогда как все остальные элементы выбираются специально для решения конкретной задачи управления.
Задающее устройство (ЗУ) формирует задающее воздействие y*(t), представляющее собой желаемое значение управляемой переменной. Задающее устройство в явном виде используется когда:
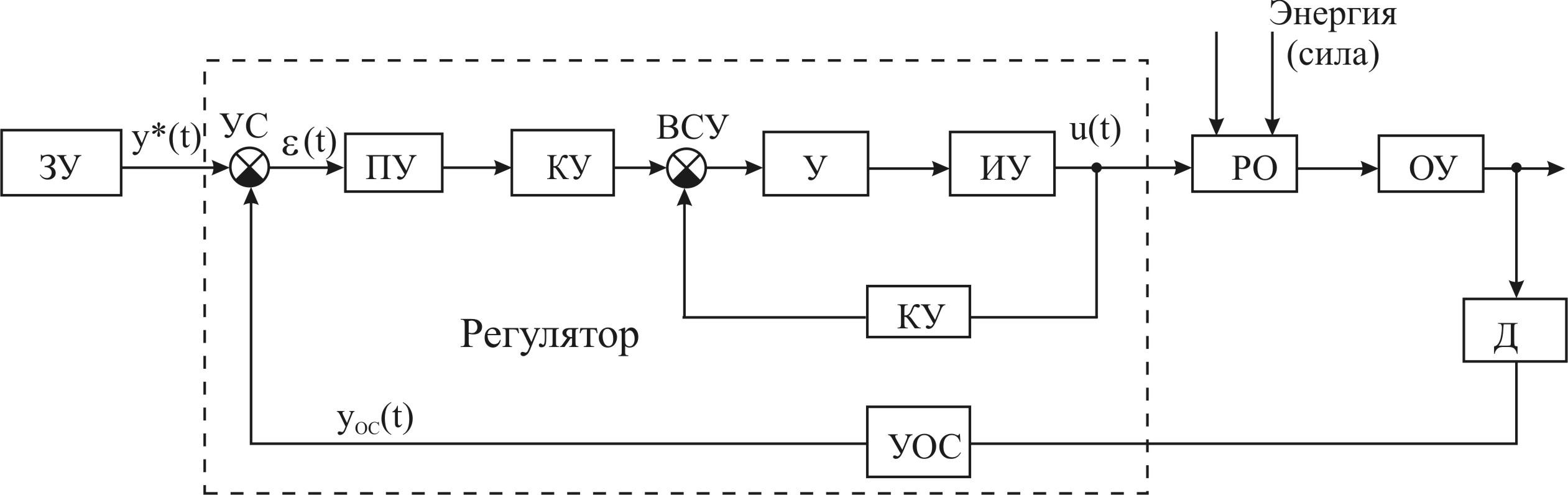
Рис. 1.7. Обобщённая функциональная схема САУ
- задающее воздействие y*(t) и сигнал обратной связи yос(t) связаны функциональной зависимостью или отличаются масштабом;
- y*(t) содержит в себе наряду с полезным входным сигналом и случайные возмущения (помехи).
Устройство сравнения (УС) вырабатывает сигнал ошибки (t) на основе сравнения задающего воздействия y*(t) и сигнала главной обратной связи yос(t).
Преобразующее устройство (ПУ) преобразует одну физическую величину в другую, более удобную для использования в процессе управления, не выполняя при этом функций измерения, усиления или коррекции.
Корректирующее устройство (КУ) позволяет повысить устойчивость и улучшить динамические свойства САУ.
Вспомогательное устройство сравнения (ВСУ) сопоставляет сигнал в промежуточной точке прямой цепи с сигналом местной обратной связи.
Усилительное устройство (У) усиливает мощность сигналов в регуляторе.
Исполнительное устройство (ИУ) вырабатывает регулирующие (управляющие) воздействия u(t), непосредственно прикладываемые к объекту управления и оказывающие воздействие на регулирующие органы.
Элемент главной обратной связи (УОС) вырабатывает сигнал в определенной функциональной зависимости от управляемой переменной y(t).
Устройства УС, ПУ, КУ, ВСУ, У, ИУ, УОС являются элементами устройства управления, т.е. регулятора.
Чувствительное (измерительное) устройство (Д) измеряет и преобразует управляемые и контролируемые входные переменные и управляющие воздействия в сигналы, удобные для дальнейшего использования в системе управления.
Регулирующие органы (РО) передают управляющие воздействия непосредственно на объект управления, изменяя количество поступающих в объект энергии или вещества (воды, воздуха, топлива и т.д.).
Умение разделять САУ (САР) на функциональные элементы и составлять по ним функциональные схемы в общем виде, способствует ясности представлений о физических процессах, происходящих в системе управления и имеет большое значение для дальнейшего исследования и расчета основных режимов работы САУ.