

Устойчивость
Об устойчивости фильтра с бесконечной импульсной характеристикой судят по его передаточной функции. Для дискретного фильтра необходимо и достаточно, чтобы все полюса его передаточной функции по модулю были меньше единицы, т.е. лежали внутри единичного круга на z-плоскости. Все критерии устойчивости, применимые в теории линейных стационарных систем, например критерий устойчивости Найквиста или критерий устойчивости Рауса применимы и в случае БИХ-фильтров.
В отличие от БИХ-фильтров, КИХ-фильтры всегда являются устойчивыми.
Примерами БИХ-фильтров являются фильтр Чебышева, фильтр Баттерворта, Фильтр Калмана и фильтр Бесселя.
Зависимости частотных свойств звеньев системы регулирования
Каждое звено обладает определенной динамикой. Это означает, что каждое последующее звено должно обладать такими динамическими характеристиками, чтобы воспринять сигнал на входе без искажений.
Главным динамическим объектом является объект управления – его динамические свойства являются определяющими при выборе и создании других частей системы.
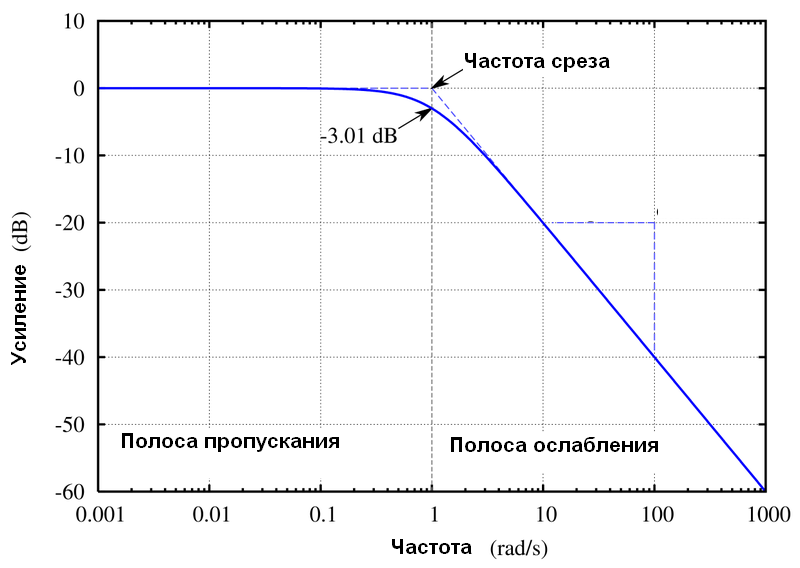
Для описания динамических характеристик линейных элементов будем использовать частоту среза.
Частота среза – частота, выше которой мощность выходного сигнала электронной схемы уменьшается вполовину от мощности в полосе пропускания.
Для описания динамики ЦАП и АЦП – частоту дискретизации.
Для описания динамики регулятора – частоту контура управления.
Частота контура управления – количество полных вычислений ядра регулятора за единицу времени.
Начнем двигаться от объекта.
Пусть ОУ имеет частоту среза
![]() .
Тогда в спектре сигнала x
гармоники с частотами выше
будут иметь амплитуды, которыми начиная
с некоторой частоты можно пренебречь
совсем.
.
Тогда в спектре сигнала x
гармоники с частотами выше
будут иметь амплитуды, которыми начиная
с некоторой частоты можно пренебречь
совсем.
Поэтому эмпирически частоту среза датчика принимают
![]() .
.
Если датчик имеет аналоговый выход, то
преобразователь (АЦП), на вход которого
поступает сигнал
![]() ,
должен иметь частоту дискретизации
,
должен иметь частоту дискретизации
![]() .
.
Тогда частота контура управления должна удовлетворять условию
![]() .
.
Таким образом, получаем эмпирическую зависимость:
![]() .
.
Данный расчет является примерным, конкретные значения коэффициентов в реальности зависят не только от частоты среза, но и вообще от вида АЧХ объекта, ее крутизны, наличия резонансов в ВЧ-области и т.д., поэтому для каждой конкретной системы частоты звеньев следует выбирать специально, но пользуясь приведенной зависимостью.
Регуляторы
Рассмотрим схему системы регулирования.
Данная схема лежит в основе большинства систем регулирования. В реальности такая схема добавляется разными дополнительными системами контроля.
Р – регулятор
Д – датчик
ОУ – объект управления
ИУ – исполнительное устройство
X – уставка от программно-задающего устройства
U – сигнал управления
ε – сигнал ошибки,
![]()
x – переменная (сигнал) регулирования
– сигнал регулирования, измеренный датчиком
Рассмотрим наиболее часто используемые структуры регуляторов в данной схеме.
Регулятор типа п – пропорциональный
Закон регулирования:
![]()
Сигнал управления прямо пропорционален сигналу ошибки.
Недостатком регулятора является то, что в результате работы регулятора никогда не будет достигнуто выполнение условия ε=0.
Ошибку можно уменьшать за счет увеличения К, однако увеличение К приводит к ухудшению и в конечном итоге потере устойчивости системы.
Достоинства регулятора – простота реализации и настройки, безинерционность работы.