

Организация микроконтроллерных систем управления
В нашем курсе мы будем рассматривать основные вопросы реализации СУ на основе микроконтроллерных вычислителей. Рассмотрим общую структуру системы управления:
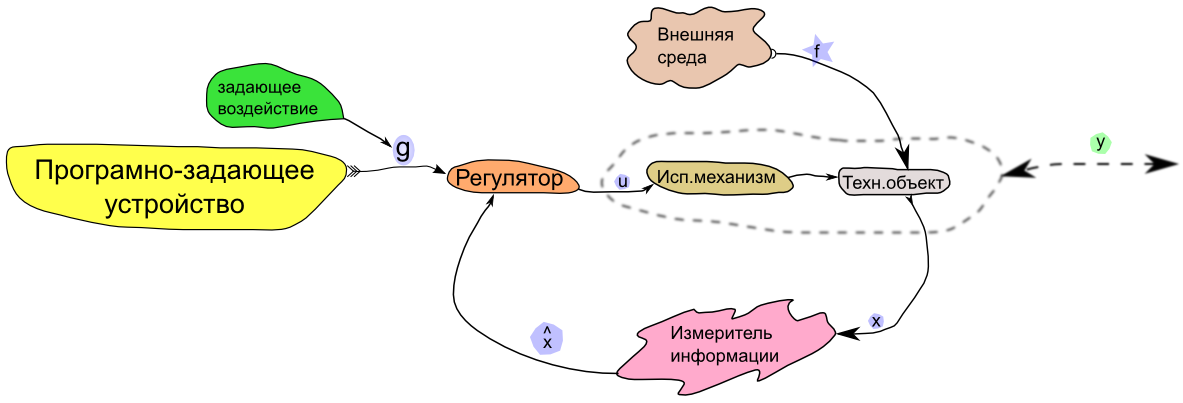
То же самое в «академическом» виде, принятом в теории управления:
Система представляет собой регулятор - вычислитель на основе МК, выполняющий алгоритм управления (регулирования) и соответствующего аппаратурного окружения в составе: датчиков, усилительно-преобразующих и исполнительных устройств, системы питания и интерфейсов взаимодействия между этими элементами и с внешними частями системы.
Данная система является цифровой, иначе говоря, дискретной, с квантованием как по уровню (определяется разрядностью обрабатываемых данных), так и по времени (определяется скоростью обмена данными межу устройствами).
Информационно-измерительные устройства, датчики
Чувствительный элемент - преобразует параметры среды в пригодный для технического использования сигнал.
Датчик - законченное изделие на основе чувствительного элемента, включающее, в зависимости от потребности, устройства усиления сигнала, линеаризации, калибровки, аналого-цифрового преобразования и интерфейса для интеграции в системы управления.
Усилительно-преобразующие устройства
Устройства, выполняющие функцию усиления мощности сигнала с преобразованием его природы (усилитель-преобразователь) или без него.
Исполнительные устройства
Исполнительное устройство — подсистема, передающая воздействие с управляющего устройства на объект управления.
Интерфейс связи
Интерфейс связи (от англ. interface — поверхность раздела, перегородка) — совокупность средств и методов взаимодействия между элементами системы для осуществления передачи данных между ними.
Характеризуется совокупностью (стеком) протоколов передачи данных — набор соглашений, который определяет обмен данными между элементами системы от физического до прикладного уровней (модель OSI). Протоколы задают способы передачи сообщений и обработки ошибок по каналам связи, а также позволяют разрабатывать стандарты, не привязанные к конкретной аппаратной платформе.
Данный состав является типовым, поэтому микроконтроллеры, предназначенные для этих целей (СУ) уже имеют в своем составе законченные решения этих типовых задач.
Микроконтроллеры. Основные сведения
Микроконтроллер – электронно-вычислительное устройство, которое помимо средств выполнения математических вычислений и алгоритмов (процессор и память) обладает набором средств, необходимых для прямого взаимодействия с устройствами, входящими в аппаратуру системы регулирования или управления – перечисленным выше т.н. типовым составом аппаратуры СУ.
Микроконтроллер – устройство, включающее в себя процессор, память (ОЗУ и ПЗУ) и различные специализированные периферийные устройства, такие как:
цифровые порты, которые можно настраивать как на ввод, так и на вывод
интерфейсы ввода-вывода, такие как UART, I²C, SPI, CAN, USB, Ethernet
аналого-цифровые и цифро-аналоговые преобразователи
компараторы
широтно-импульсные модуляторы, генераторы сигналов
таймеры, счетчики, квадратурные демодуляторы
массивы встроенной флэш-памяти
встроенный тактовый генератор
устройства контроля питания и сигнала сброса (RESET)
Также возможны специализированные блоки:
контроллеры бесколлекторных двигателей
контроллеры дисплеев и клавиатур
радиочастотные приемники и передатчики
Характеристики МК:
Разрядность – 8, 16, 32.
Быстродействие – MIPS, FLOPS
Архитектура – RISC, CISC, ARM
Поддержка плавающей точки
Общение ЦП с устройствами осуществляется посредством работы (запись/чтение) c соответствующими регистрами МК.
Регистр — область памяти, используемая для хранения n-разрядных двоичных слов (чисел) и выполнения преобразований над ними.
Порты ввода-вывода – имеет электрическое состояние на выводах, соответствующее числу, записанному в регистр порта
Классифицируются по:
- количеству линий (контактов)
- направленности – входные, выходные, двунаправленные
Электрически по:
- логические уровни (TTL (ТТЛ), CMOS (КМОП))
- максимальное напряжение
- нагрузочная способность – макс допустимый ток
- входной/выходной импеданс (вх/вых сопротивление)
- количеству состояний – с поддержкой 3-го состояния – tristate, z-state или без
- наличию подтягивающих резисторов (pull-up, pull-down) и возможность и управления ими. Необходимы для согласования и задания определенного состояния входной ножки.
Электрические уровни логических сигналов в зависимости от напряжения питания и технологии логических элементов (ТТЛ, КМОП):
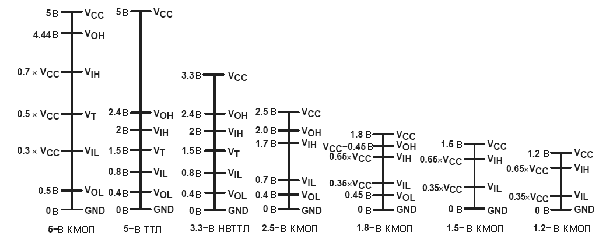
здесь
VСС – напряжение питания,
VIH – входное напряжение высокого уровня,
VIL – входное напряжение низкого уровня,
VOH – выходное напряжение высокого уровня,
VOL – выходное напряжение низкого уровня.
Как правило, одни и те же выводы микросхемы микроконтроллера могут быть сконфигурированы как входные или выходные линии для разной периферии, например, как линия IO общего назначения или как линия для входного сигнала АЦП.
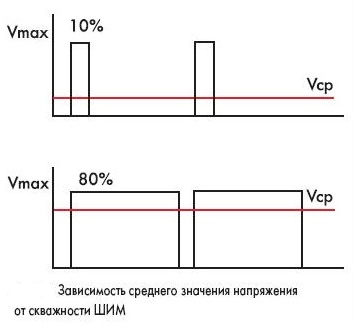
Широтно-импульсные модуляторы – устройства, реализующие ШИМ, такой тип модуляции, когда передаваемым сигналом является ширина импульса или скважность (отношение длительности импульса к периоду следования импульсов, измеряется в %).
Аналого-цифровой преобразователь (АЦП, англ. Analog-to-digital converter, ADC) — устройство, преобразующее входной аналоговый сигнал в дискретный код (цифровой сигнал).
Цифро-аналоговый преобразователь (ЦАП) — устройство для преобразования цифрового (обычно двоичного) кода в аналоговый сигнал (ток, напряжение или заряд). Цифро-аналоговые преобразователи являются интерфейсом между дискретным цифровым миром и аналоговыми сигналами.
Счётчик числа импульсов — устройство, на выходах которого получается двоичный (двоично-десятичный) код, определяемый числом поступивших импульсов. Счётчики могут строиться на T-триггерах. Основной параметр счётчика — модуль счёта — максимальное число единичных сигналов, которое может быть сосчитано счётчиком. Счётчики обозначают через СТ (от англ. counter).
Таймер — устройство, выдающее в заданный момент времени (или по прошествии интервала времени) определённый сигнал, либо порождающее внутреннее событие для ЦП - прерывание.
Устройства контроля питания и сигнала сброса - предназначены для контроля питания и корректного запуска ядра и периферии.
Устройство запуска по питанию - Power-on Reset (POR) – по сути одновибратор, генерирует импульс определенной ширины на внутренней линии сброса (INTERNAL RESET) по сигналу внешней линии сброса (RESET) в процессе включения (нарастания напряжения питания) – гарантирует, что контроллер запустится тогда, когда напряжение питания будет номинальным.
Детектор падения напряжения – brown-out detector (BOD) – измеряет напряжение питания и в случае, если оно падает ниже установленного уровня, генерирует внутренний сигнал сброса (подвешивает контроллер), пока значение напряжения питания не вырастет выше уровня включения.
Watchdog timer - «Сторожевой пес» - сторожевой таймер – перезапускает контроллер (генерирует импульс внутреннего сброса) в случае, если в течении заданного интервала не произошло обнуление его счетчика.