

7.4. Влияние погрешностей центрирования
И ПРИКЛАДЫВАНИЯ РЕБРА ЛИНЕЙКИ КИПРЕГЕЛЯ
К ТОЧКАМ НА ОРИЕНТИРОВАНИЕ ПЛАНШЕТА
Определение положения точек на планшете способом засечек полярным и другими способами основано на том, что после ориентирования планшета по линии или прочерчивания направлений на точки линии на планшете должны быть параллельны горизонтальным проложениям линий местности, иначе уменьшается точность построения плана на планшете. Кроме погрешностей визирования на точку, неперпендикулярности визирной и горизонтальной осей кипрегеля, непараллельности горизонтальной оси кипрегеля нижней поверхности линейки и приведения планшета в горизонтальное положение на параллельность соответствующих линий на планшете и на местности влияют погрешности центрирования планшета и прикладывания ребра линейки кипрегеля к двум точкам, по которым ориентируют планшет.
Рассмотрим влияние погрешностей центрирования на ориентирование планшета. Пусть на планшете имеются две точки а и Ъ (рис. 7.2), по которым ориентируют планшет. При установке мензулы в точке А точки а и А не оказались на одной отвесной линии, т. е. планшет центрирован с погрешностью (рис. 7.2, а). Поэтому при ориентировании на точку В, когда ребро линейки кипрегеля прикладывают к точкам а и Ь, а планшет поворачивают так, чтобы линия визирования проходила через точку В, линия ab на планшете не будет параллельной линии AB = s местности, между ними
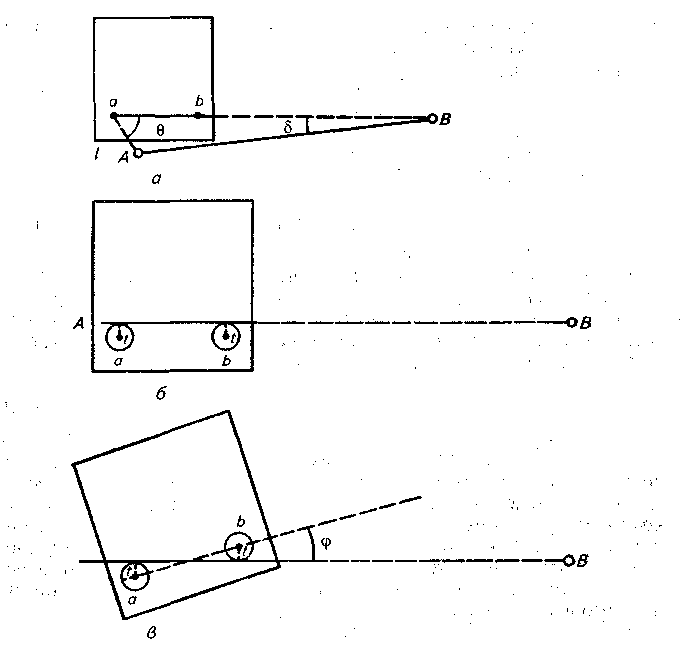
Рис. 7.2. Погрешность ориентирования планшета из-за влияния погрешностей центрирования планшета (а) и прикладывания ребра к точкам (б, в)
образуется горизонтальный угол 5, который называют погрешностью ориентирования планшета. Согласно рисунку 7.2, а можно написать (по теореме синусов)
![]() =
=
![]() .
.
Так как угол 5 мал,
то sin![]() заменим радианной мерой угла 8'/3438', тогда
заменим радианной мерой угла 8'/3438', тогда
![]() '
= 3438'
'
= 3438'![]() sin0. (7.1)
sin0. (7.1)
Из формулы (7.1)
следует, что, когда погрешность
центрирования
![]() направлена вдоль линии ориентирования
АВ, а
следовательно, 0 = 0 или 0 = 180°, погрешность
ориентирования
= 0. Погрешность ориентирования будет
максимальной при 0 = 90° (когда sin0
= 1), поэтому
направлена вдоль линии ориентирования
АВ, а
следовательно, 0 = 0 или 0 = 180°, погрешность
ориентирования
= 0. Погрешность ориентирования будет
максимальной при 0 = 90° (когда sin0
= 1), поэтому
![]() =
3438'
. (7-2)
=
3438'
. (7-2)
Формулы (7.1) и (7.2) показывают, что погрешность ориентирования увеличивается с увеличением погрешности центрирования и уменьшается с увеличением расстояния s между точками, по которым ориентируют планшет. При мензульной съемке погрешность ориентирования, которую вызывает погрешность центрирования, считают допустимой, если она не превышает 2'. Если известно расстояние s, то можно вычислить допустимую погрешность центрирования по формуле
![]() . (7.3)
. (7.3)
Например, при s = 500 м погрешность центрирования планшета не должна быть более
![]()
Теперь рассмотрим
влияние погрешностей прикладывания
ребра
линейки кипрегеля к точкам на планшете.
При ориентировании планшета ребро
линейки стремятся приложить к центрам
наколов точек а и Ъ
(см. рис. 7.2,
а, 6), фиксирующих
на планшете положение точек А
и
В местности,
однако при этом допускают погрешность
t,
которую
считают равной разрешающей способности
глаза, т. е. 0,01 см. Если бы ребро линейки
кипрегеля при ориентировании планшета
отошло от точек a
и b
на погрешность
t
в одну сторону
(см. рис. 7.2, б),
то линия ab
на планшете
была бы параллельна линии АВ
местности
и погрешность ориентирования была бы
равна нулю. Очевидно, наихудшим будет
тот случай, когда ребро линейки
кипрегеля при прикладывании отойдет
от центров наколов а
и b
на величину
t
в разные
стороны (рис. 7.2, в).
В этом
случае величина погрешности ориентирования
будет равна ср. Согласно
рисунку 7.2, в
получим
![]() /3438'
= t/(ab/2)
= 2t/ab,
откуда
/3438'
= t/(ab/2)
= 2t/ab,
откуда
ab![]() . (7.4)
. (7.4)
При = 2', t= 0,01 см по формуле (7.4) получим
![]() .
.
Следовательно, чтобы погрешность ориентирования планшета не превышала 2', расстояние между точками на планшете не должно быть меньше 34 см.
Из формулы (7.4) при
f
= 0,01 см следует, что
![]() .
Например,
при s
=
10 см
=
7’
.
.
Например,
при s
=
10 см
=
7’
.
Для уменьшения влияния погрешности ориентирования планшета на точность съемки во всех случаях определения положения точек способом засечек руководствуются правилом: «Ориентируйся по длинной линии, засекайся по короткой».
7.5. НИВЕЛИРОВАНИЕ НАКЛОННОЙ ВИЗИРНОЙ ОСЬЮ (ТРИГОНОМЕТРИЧЕСКОЕ НИВЕЛИРОВАНИЕ)
При мензульной съемке рельефа местности и построении съемочного обоснования превышения между точками определяют с одной станции на расстоянии в несколько сотен метров и даже несколько километров, применяя тригонометрическое нивелирование.
Для определения превышения h между точками А и В (рис. 7.3, а) наклонной визирной осью (тригонометрическим нивелированием) на одной точке А устанавливают мензульный комплект или теодолит, а на другой В — знак (веху, пирамиду и др.). Пусть горизонтальное проложение между точками А и В равно s. Для измерения угла наклона v визируют на верх знака и. На станции измеряют высоту прибора i, представляющую отрезок отвесной линии от точки А (верха столба, кола и др.) до горизонтальной оси прибора. Определяют высоту знака и (отрезок отвесной линии от точки В до точки, на которую производят визирование при измерении угла наклона).
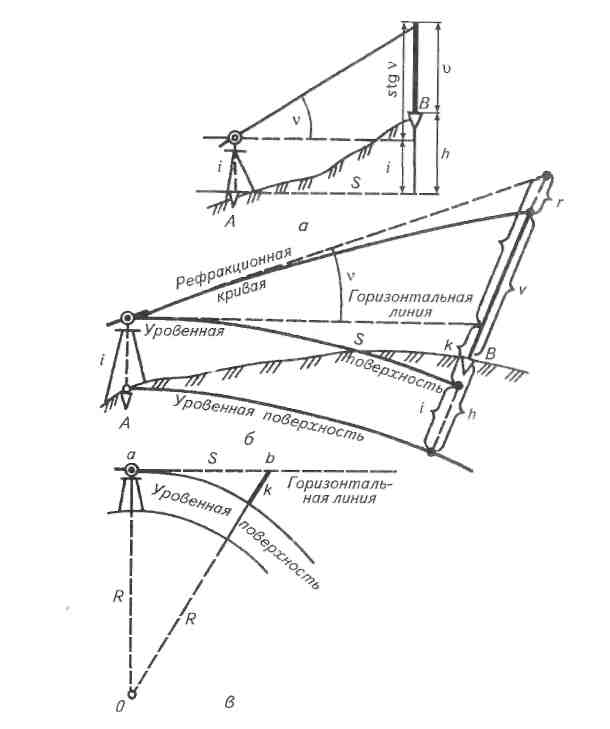
Рис. 7.3. Тригонометрическое нивелирование без учета кривизны Земли и рефракции (а), с их учетом (б) и определение поправки за кривизну Земли (в)
Если предположить, что уровенная поверхность представляет плоскость, а визирный луч — прямую линию, т. е. кривизна Земли и рефракция (преломление) светового луча в атмосфере не учитываются, то можно получить формулу (см. рис. 7.3, а)
h
+
![]() =
s
=
s
![]() +
i, откуда
+
i, откуда
h = s + i - . (7.5)
В действительности, визирный луч идет по рефракционной кривой, и угол наклона v измеряют между касательными к уровенной поверхности и рефракционной кривой (рис. 7.3, б). Треугольник, образованный этими касательными и отвесной линией в точке В,
близок к прямоугольному, поэтому катет, лежащий против угла v, равен stg v, а следовательно,
h + + r=i + k + s ,
откуда
h = s + i — + k — r,
где r—поправка за рефракцию; k — поправка за кривизну Земли.
Обозначив k - r=f, где f — поправка за кривизну Земли и рефракцию, получим
h = stgv + i- +f. (7.6)
Определим к, г и/в формуле (7.6).
Поправку за кривизну Земли к легко и точно можно определить из прямоугольного треугольника Оаb (рис. 7.3, в). (R + k)2 = = R2 + s2, где Я — величина, близкая к радиусу Земли. Из полученного равенства следует, что к (2R + к) = s2, откуда
k = s2/(2R + k).
В знаменателе правой части полученной формулы к во много раз меньше удвоенного радиуса Земли, поэтому, отбросив ее, можно написать
k = s2/2R. (7.7)
Пример: R— 6370 км, 5= 1000 м, получим к= 8 см.
Значительно сложнее определить r — поправку за рефракцию. Если бы был известен радиус рефракционной кривой, то поправку за рефракцию можно было бы определить по формуле (7.7), в которую вместо радиуса Земли можно подставить радиус рефракционной кривой. Однако многочисленные исследования показывают, что вид рефракционной кривой постоянно изменяется в зависимости от изменения плотности слоев атмосферы (в разное время года, месяца и суток), через которые проходит луч визирования, а следовательно, изменяется и радиус рефракционной кривой.
Наиболее уверенно радиус рефракционной кривой, а следовательно, и поправку за рефракцию определяют при высоте визирного луча над земной поверхностью от 2 м и более. Для этих условий радиус рефракционной кривой в среднем в шесть раз больше радиуса Земли, а следовательно, поправка за рефракцию в среднем в шесть раз меньше поправки за кривизну Земли, вследствие чего можно написать
f
= k
- r
=
k
-
![]() k
= 0,83k.
k
= 0,83k.
Подставив в это выражение значение k из формулы (7.3), получим
f = 0,42s2/R. (7.8)
По этой формуле обычно и вычисляют поправку за кривизну Земли и рефракцию в формуле (7.6).
Превышения при тригонометрическом нивелировании вычисляют с округлением до 0,01 м, поэтому поправку / вычисляют лишь для расстояний, превышающих 300 м, так как при s = 300 м / = 0,006 м = 0,01 м. Поправка изменяется пропорционально квадрату расстояния, и при s= 1000 м она равна 0,07 м. Для определения поправок обычно пользуются специальной таблицей.
7.6. ИЗМЕРЕНИЕ УГЛА НАКЛОНА ВЕРТИКАЛЬНЫМ КРУГОМ КИПРЕГЕЛЯ КН
Деления на лимбе номограммного кипрегеля КН (рис. 7.4), выпускаемого отечественной промышленностью с 1976 г., подписаны от 0 до 50° в обе стороны (по ходу и против хода часовой стрелки) через каждый градус и сопровождаются знаками «плюс» и «минус» в зависимости от знака угла наклона. Знак отсчетов П и Л при наведении на точку — один и тот же и соответствует знаку измеряемого угла наклона, если место нуля равно нулю. Если значение угла наклона близко к месту нуля, то отсчеты П и Л могут иметь разные знаки. Цена деления лимба 5', и в пределах пятиминутного интервала значение отсчета в минутах или долях минуты оценивают на глаз.
Кипрегель КН имеет два цилиндрических уровня (не считая уровня на линейке): уровень при вертикальном круге с установочным винтом 11 (см. рис. 7.4) для приведения пузырька уровня на середину перед отсчетом по лимбу и реверсивный (оборотный) уровень при зрительной трубе, позволяющий использовать кипрегель для определения превышений горизонтальной визирной осью (как нивелир). Зрительная труба кипрегеля КН дает прямое изображение предметов и снабжена ломаным вращающимся окуляром 8х. Закрепительное и наводящее 9устройства (винты) находятся на одной оси в верхней части колонки.
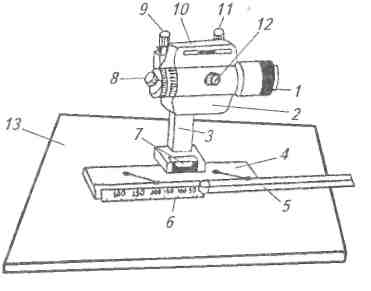 Рис.
7.4.
Номограммный кипрегель
КН:
Рис.
7.4.
Номограммный кипрегель
КН:
/ — зрительная труба; 2 — вертикальный круг; 3 — колонка; 4 - основная линейка кипрегеля; 5— подвижная линейка; 6— съемная масштабная линейка с иглой на конце; 7— цилиндрический уровень на линейке; 8— окуляр; 9—наводящий и закрепительный винты вертикального круга; 10 — цилиндрический уровень вертикального круга; 11 — винт цилиндрического уровня; 12 — кремальера; 13 — мензульная доска
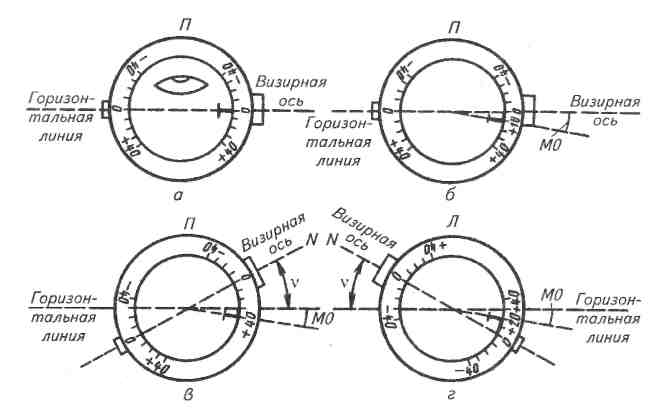
Рис. 7.5. Схема измерения углов наклона вертикальным кругом кипрегеля КН
осью (как нивелир). Зрительная труба кипрегеля КН дает прямое изображение предметов и снабжена ломаным вращающимся окуляром 81. Закрепительное и наводящее 9 устройства (винты) находятся на одной оси в верхней части колонки.
Измерение углов наклона вертикальным кругом кипрегеля КН схематически показано на рисунке 7.5, при этом для наглядности нулевой диаметр лимба на них изображен параллельным визирной оси.
Случай, когда МО = 0, показан на рисунке 7.5, а, а когда МО = +10° — на рисунке 7.5, б.
Отсчет по лимбу при визировании на точку при П иллюстрирует рисунок 7.5, в, а при Л — рисунок 7.5, г. Из этих рисунков видно, что
у
= П-МО
и
![]() =
Л + МО. (7.9)
=
Л + МО. (7.9)
Решая эти уравнения относительно v и МО, получим
у = (П + Л)/2 и МО = (П-Л)/2. (7.10)
Пример 1. На рисунке 7.5, в, г П = +40°, Л = +20°; по формуле (7.10) вычисляем: v = (+40° + 20°)/2 =+30° и МО = (+40°-(+20°))/2 = +10\ Для контроля по формулам (7.9) получаем: v = +40° - (+10°) = +30° и v = +20° + 10° = +30°.
Пример 2. П = +2°03', Л =+2°04'; по формулам (7.10) вычисляем: v = (+2°03' + 2°04')/2 = +2°03,5' и МО = (+2°03' - (+2°04'))/2 = -0°00,5'. Для контроля по (7.9) получаем: v = +2°03' - (-0°00,5') = +2°03,5' и v = +2°04' + (-0"00,5') = = +2°03,5'.
' Такое
устройство окуляра не упрощает, а
затрудняет поиск предмета в поле зрения
трубы во время съемки и не является
достоинством кипрегеля.
Такое
устройство окуляра не упрощает, а
затрудняет поиск предмета в поле зрения
трубы во время съемки и не является
достоинством кипрегеля.
Для работы с кипрегелем КН при одном положении вертикального круга (при съемке рельефа) необходимо место нуля приводить к нулю, следует отметить, что у вертикального круга кипрегеля КН для положений П и Л место нуля имеет разные знаки.
7.7. ОПРЕДЕЛЕНИЕ ВЫСОТ ПРИБОРА И ЗНАКА
Согласно формуле (7.6) для вычисления превышения возникает необходимость измерять высоту прибора i и высоту знака о, на который проводят визирование.
Высоту прибора обычно измеряют непосредственно рулеткой и записывают с округлением до 0,01 м. Чтобы повысить точность измерения высоты прибора, ее получают как сумму двух составляющих: первая, постоянная для данного мензульного комплекта, — высота от нижней поверхности доски до горизонтальной оси кипрегеля, вторая, изменяющаяся для каждой станции, — высота от нижней поверхности доски до верхнего торца кола, отмечающего точку стояния и ее высоту. Если мензула установлена над точкой, обозначенной на местности столбом, то высоту прибора измеряют от верха столба, при этом высоту точки относят также к верху столба.
Высоту знака измеряют непосредственно или получают путем вычислений в зависимости от вида знака.
Если знаком служит дальномерная рейка или вешка, то их высоту (длину) измеряют непосредственно рулеткой и записывают с округлением до 0,01 м, при этом имеется в виду, что рейка или вешка будет установлена на кол или столб, а визировать для измерения угла наклона будем на верх рейки или вешки. Если вешка установлена около столба (кола), то высоту ее измеряют от верха столба (кола) до верха вешки.
При построении съемочного обоснования очень часто знак представляет веху, врываемую в землю на глубину до 0,5... 1,0 м в зависимости от плотности грунта и длины вехи. На расстоянии 0,2...0,3 м от основания вехи забивают кол и высотой знака (вехи) считают отрезок отвесной линии от верхнего торца кола до крестовины в верхней части вехи (рис. 7.6, а), на которую производят визирование. Для лучшей видимости при больших расстояниях (1...2км) в верхней части вехи привязывают пучок соломы или прибивают флаг. До установки вехи в вырытую яму рулеткой измеряют расстояние от крестовины до метки на вехе, которую делают в 1,5...2 м от нижнего конца вехи. После установки вехи измеряют отрезок отвесной линии от метки до верхнего торца кола, пользуясь горизонтальной рейкой. Сумма двух результатов измерений, округленная до 0,01 м, дает высоту знака. Если веху устанавливают возле столба, то высотой знака считается отрезок отвесной линии от крестовины вехи до верха столба.
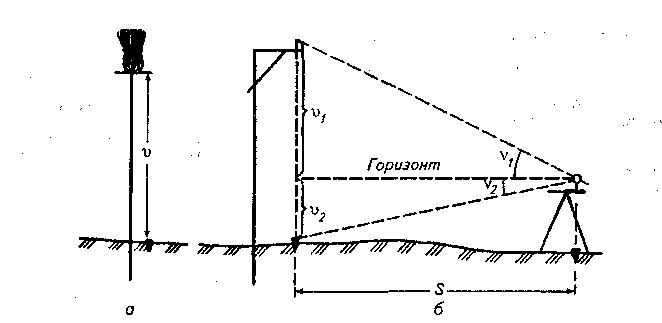
Рис. 7.6. Веха (а) и определение ее высоты (б)
При съемке в крупных масштабах для работы на станции веху вынимают из земли осторожно, чтобы не осыпалась земля. Над углублением центрируют планшет, а по окончании работы веху вставляют в землю на ту же глубину. Для этого при первоначальной установке вехи на ней делают зарубку на уровне верхнего торца кола.
![]() Чтобы
не вынимать веху из земли (так как это
влияет на точность определения высоты
знака), иногда в верхней части вехи
делают горизонтальную перекладину с
визирным цилиндром (рис. 7.6, б).
Ось визирного
цилиндра проецируют по отЕесу на землю
(с двух-трех позиций наблюдателя) и
забивают кол. Высоту знака, равную
расстоянию от верха визирного цилиндра
до верха торца кола, вычисляют по
измеренному горизонтальному проложению
s
и двум углам
наклона vi
и v2
по формуле1
Чтобы
не вынимать веху из земли (так как это
влияет на точность определения высоты
знака), иногда в верхней части вехи
делают горизонтальную перекладину с
визирным цилиндром (рис. 7.6, б).
Ось визирного
цилиндра проецируют по отЕесу на землю
(с двух-трех позиций наблюдателя) и
забивают кол. Высоту знака, равную
расстоянию от верха визирного цилиндра
до верха торца кола, вычисляют по
измеренному горизонтальному проложению
s
и двум углам
наклона vi
и v2
по формуле1
Эта
формула справедлива, если углы v1
и v2
имеют разные знаки,
а если знаки одинаковые, то
=![]() -
-
![]() .
.
Таким же способом определяют высоту пирамиды (см. рис. 1.21, б), мачты и др.
При определении высоты знака по изложенному способу необходимо обращать внимание на точность измерения расстояния ,s и углов наклона, имея в виду, что чем больше расстояние s, тем точнее надо измерять углы наклона, и чем больше углы наклона, тем точнее нужно измерять расстояние s, руководствуясь при-
1 Высота знака может быть также определена
непосредственно при помощи шнура,
тесьмы, тонкой вехи, рейки и др.
Высота знака может быть также определена
непосредственно при помощи шнура,
тесьмы, тонкой вехи, рейки и др.
![]() ближенной
формулой
ближенной
формулой
![]() т.
е. относительная погрешность измерения
расстояния равна относительной
погрешности измерения угла.
т.
е. относительная погрешность измерения
расстояния равна относительной
погрешности измерения угла.
Углы v нужно измерять при обоих положениях вертикального круга. В этом случае средняя квадратическая погрешность измерения угла характеризуется величиной т, = 0,5'. Поэтому, желая узнать, с какой точностью надо измерять расстояние s, можно воспользоваться формулой
Например, при угле наклона v = 5° = 300' и 5= 100м.
![]() Следовательно,
расстояния можно измерять со средней
квадратической относительной
погрешностью
Следовательно,
расстояния можно измерять со средней
квадратической относительной
погрешностью
![]()
Но этого нельзя
достичь, применяя нитяной дальномер.
Для измерений потребуется
применить рулетку, ленту и др. Высота
знака с учетом погрешностей измерений
двух углов наклона получится с
относительной средней квадратической
погрешностью примерно в полтора раза
большей, чем
![]() и
и
![]() ,
т. е. в данном
случае с относительной погрешностью
1/400. При и = 6,00 м абсолютная погрешность
высоты знака равна 6,00/400 = 0,015 м.
,
т. е. в данном
случае с относительной погрешностью
1/400. При и = 6,00 м абсолютная погрешность
высоты знака равна 6,00/400 = 0,015 м.
Если центр знака под пирамидой находится ниже поверхности земли, то на центр ставят рейку, визирование при измерении утла v производят на верх рейки и учитывают ее длину при определении высоты знака.
Если знаком является постоянный предмет местности (верх шпиля здания, трубы завода, эмблемы религиозного культа, антенны и др.), т. е. недоступная точка для установки мензулы, то высоту его принимают равной нулю, потому что при измерении угла наклона визируют на ту точку, для которой определяют превышение.