

19.6. Фазовые измерения
Рассмотрим теперь
фазовый режим измерений на несущей
частоте, применяемый в геодезических
работах. В этом случае измеряют не
время распространения сигнала от
спутника до приемника, а сдвиг фазы
колебаний несущей частоты (излучаемой
спутником) за этот промежуток времени.
Однако здесь, так же как и в наземных
фазовых дальномерах, возникает проблема
разрешения неоднозначности, обусловленная
тем, что приемником измеряют не полный
сдвиг
,
связанный с расстоянием от спутника до
приемника, а лишь его дробную часть
![]() ,
меньшую
,
меньшую
![]() .
Измеряемый сдвиг фаз реализуется в
приемнике как разность
фаз между сигналом,
принятым от спутника, и опорным сигналом,
генерируемым в приемнике.
Здесь, кроме
того, возникают проблемы, связанные с
разночастотностью сигналов из-за
движения спутника (эффект Доплера) и
трудностью согласования начальных фаз
(синфазирования) спутникового и опорного
сигнала, но в данный момент эти проблемы
не рассматривают. Допустим, что для
какого-то фиксированного момента
времени измерена дробная часть фазового
сигнала
.
Но для определения расстояния нужен
полный фазовый сдвиг:
.
Измеряемый сдвиг фаз реализуется в
приемнике как разность
фаз между сигналом,
принятым от спутника, и опорным сигналом,
генерируемым в приемнике.
Здесь, кроме
того, возникают проблемы, связанные с
разночастотностью сигналов из-за
движения спутника (эффект Доплера) и
трудностью согласования начальных фаз
(синфазирования) спутникового и опорного
сигнала, но в данный момент эти проблемы
не рассматривают. Допустим, что для
какого-то фиксированного момента
времени измерена дробная часть фазового
сигнала
.
Но для определения расстояния нужен
полный фазовый сдвиг:
Это почти та же
псевдодальность, что и при кодовых
измерениях, которую можно представить
выражением вида (19.6), но с двумя
отличиями: первое, ионосферный член
И
будет иметь другой знак, а второе,
величина
,
фигурирующая
в формуле (19.6), будет иметь несколько
другую трактовку. При кодовых измерениях
она отражает несинхронность
хода часов
спутника и приемника. При фазовых же
измерениях она является причиной
несинфазности
(несовпадения
начальных
фаз) колебаний
опорных генераторов спутника и приемника,
которую обозначают через
![]() .
Именно наличие величины
приводит к тому, что из фазовых измерений
получаем псевдодальность. Значения
и
жестко связаны друг с другом (
=
.
Именно наличие величины
приводит к тому, что из фазовых измерений
получаем псевдодальность. Значения
и
жестко связаны друг с другом (
=
![]() *
),
поскольку вследствие единства эталона
времени и частоты «часы» — это и есть
генераторы колебаний.
*
),
поскольку вследствие единства эталона
времени и частоты «часы» — это и есть
генераторы колебаний.
В литературе часто употребляют выражения «кодовая псевдодальность» и «фазовая псевдодальность», записывая их с соответствующими индексами «к» и «ф» в виде:
![]()
Приравнивая формулы
(19.10) и (19.11), определяют знамение
![]() ,
обозначив его через
,
обозначив его через
![]() (измеренная
величина разности фаз, выраженная в
долях цикла; в наземной фазовой
дальнометрии ее обозначают
(измеренная
величина разности фаз, выраженная в
долях цикла; в наземной фазовой
дальнометрии ее обозначают
![]() ):
):
![]()
Как уже упоминалось, наличие целого числа N приводит к проблеме разрешения неоднозначности.
Если каким-то способом определить число N, то можно получить измеренное значение фазовой псевдодальности Pф. Однако она содержит неизвестную величину . Фазовые измерения с двумя приемниками позволяют исключить эту величину, используя метод фазовых разностей.
Метод
фазовых
разностей.
Для рассмотрения этого метода
преобразуем формулу (19.12), исключив из
нее члены
Т
/
и
И/
,
из-за влияния тропосферы и ионосферы
как не имеющ их
прямого отношения к рассматриваемому
методу. В результате получим формулу,
связывающую дальность до спутника
с измеренной разностью фаз,
их
прямого отношения к рассматриваемому
методу. В результате получим формулу,
связывающую дальность до спутника
с измеренной разностью фаз,
Таким образом, если при кодовых измерениях имеет значение несинхронность показания часов спутника и приемника, то при фазовых измерениях — несинфазность колебаний опорных генераторов спутника и приемника. Аппаратурно, т. е. путем организации каких-то дополнительных каналов связи между приемником и спутником, эти параметры определить невозможно. Поэтому несинхронность определяют путем корреляционной обработки сигнала, изложенной в разделе 19.5, а несинфазность исключают из результатов обработки путем формирования «разностей измерений», описываемых далее.
Если в наземных системах счет идет медленно (единицы циклов в секунду или минуту), то в спутниковой системе приемник считает тысячи циклов в секунду. В целом многозначность разрешают способом, во многом аналогичным способу радиолога и фазового зонда, используемому в наземных системах. Отличие заключается в том, что расстояние до спутника в начальный момент измерений с достаточной точностью неизвестно. Сюда примешиваются проблемы, связанные с неопределенностью начальных фаз. Если непосредственно использовать уравнение (19.13), то нет основания округлять приближенно определенное значение N до ближайшего целого числа, как это делают в дальномерах. Проблемы этим не ограничиваются. Следует иметь в виду, что GPS создавалась как навигационная кодовая система, изначально не предназначенная для фазовых измерений. В ней нет стройной сетки частот, специально предназначенной для разрешения многозначности. Все это свидетельствует о том, что разрешение многозначности — самая большая проблема в спутниковых наблюдениях, решить которую удается путем формирования разности фаз измерений.
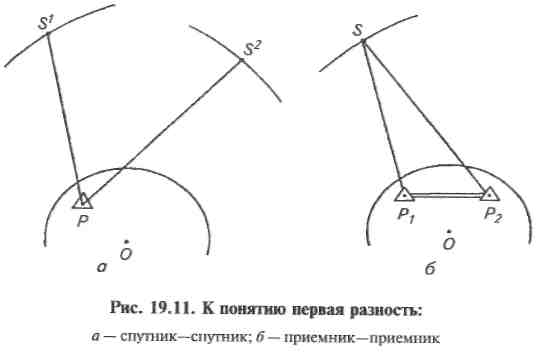
Как уже отмечалось, в геодезических фазовых измерениях участвуют минимум два приемника, каждый из которых принимает и регистрирует сигналы группы из нескольких спутников. Рассмотрим два элементарных случая: один приемник одновременно принимает и регистрирует сигналы двух спутников (рис. 19.11, а); два приемника одновременно принимают и регистрируют сигнал одного спутника (рис. 19.11, б). В первом случае программное обеспечение формирует разность фаз сигналов от двух спутников на одном приемнике. Во втором случае — от одного спутника на двух приемниках. Эту разность фаз называют первой разностью спутник—спутник и приемник—приемник.
Если сформировать разность выражений вида (19.12) для варианта спутник—спутник, то в разности исключается начальная фаза P колебаний приемника. Если сформировать разность выражений того же вида для варианта приемник—приемник, то в разности исключается начальная фаза S колебаний спутника. Чтобы исключить одновременно обе начальные фазы, необходимо сформировать вторую разность, которую получают из одновременных наблюдений двух спутников двумя приемниками (рис. 19.12, а). Другими словами: вторая разность — это разность двух первых разностей. При формировании разностей фазовых измерений система превращается из дальномерной в разностно-дальномерную, в результате чего «геометрия созвездия» становится менее благоприятной. Следует подчеркнуть, что при формировании
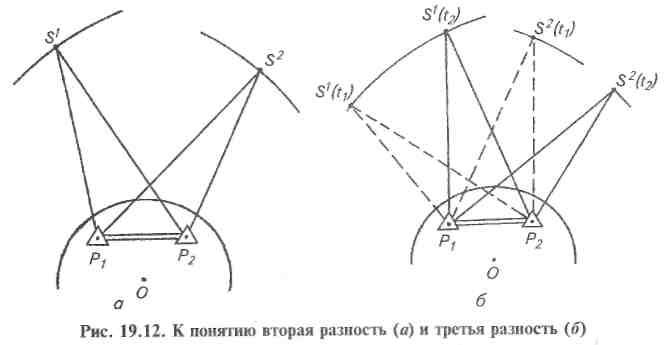
разностей выражений (19.13) образуются и разности N. Первая разность содержит разность целых уложений длин волн в расстояниях до спутника. Вторая разность содержит разность целых уложений длин волн, содержащихся в первых разностях.
Учитывая, что во второй разности исключаются начальные фазы колебаний спутника и приемника, теоретически число уложений длин волн во второй разности действительно является целым.
Поэтому при обработке измерений округляют число уложений длин волн до целого числа. Вторые разности — основа обработки измерений, так как на базе их получают окончательные результаты геодезических измерений. Вместе с тем нерешенной остается проблема разрешения неоднозначности, т. е. определения целого цикла фазовых циклов N. По этой причине возникает необходимость в использовании не только вторых, но и третьих разностей, геометрия которых показана на рисунке 19.12, б. При образовании третьих разностей фиксируются не абсолютные значения расстояний от приемников до спутников, а их приращения при перемещении последних по своей орбите за время t=t2 — t1. Такие приращения могут быть определены по показаниям фазометрического устройства при условии непрерывного отслеживания принимаемых от спутника радиосигналов. Следовательно, третьи разности позволяют решить неоднозначность путем нахождения полных значений N по их приращениям N. Однако следует иметь в виду, что такая процедура неизбежно связана с понижением точности, так как ухудшается геометрия наблюдений из-за того, что изоповерхности (см. рис. 19.1) пересекаются под острыми углами. В результате чего ошибка определения вектора базы достигает 1...3 м, что неприемлемо для геодезии. Вместе с тем приближенные значения координат вектора базы, полученные по третьим разностям, впоследствии используют при окончательном решении по вторым разностям.
Заметим, что математические соотношения, характеризующие фазовые разности спутниковых сигналов, рассмотрены в литературе.
Задачу решают параметрическим способом по методу наименьших квадратов, базирующемуся на составлении и решении системы линейных уравнений. При этом разрешение многозначности сводится к вычислению числа целых уложений длин волн N0 во второй разности для каждой пары пунктов и для каждой пары спутников в начальный момент регистрации результатов. В уравниваниях в качестве неизвестных участвуют помимо координат вектора базы еще и параметры многозначности N0. Отсюда видна разница в разрешении многозначности наземных и спутниковых измерений.
Если при работе с наземным дальномером число уложений длин волн N определяют непосредственно в процессе наблюдений, то при работе со спутниковой аппаратурой многозначность разрешают только после постобработки в камеральных условиях. Разрешение многозначности выполняют с помощью программного обеспечения в следующем порядке.
Используя эфемеридную информацию и приближенные координаты вектора базы, вычисляют параметры многозначности N'0, которые содержат ошибки и не являются целыми числами, как это должно быть. Округляют параметры многозначности до ближайших целых чисел, получая тем самым набор параметров многозначности N0, которые пока не являются вероятнейшими. Получение вероятнейших значений обеспечивает дальнейшая процедура. Используя набор целочисленных параметров многозначности, вычисляют новые координаты вектора базы. Они также ошибочны, так как ошибочны значения параметров многозначности. Однако на этом этапе достигают соответствия между параметрами многозначности (полученными разностями координат) и каталожными координатами исходных пунктов. Далее наступает этап сканирования, в результате которого компьютер последовательно изменяет (увеличивает или уменьшает) на 1, 2,... значения параметров многозначности, получая каждый раз новые решения для вектора базы. Число комбинаций и решений огромно. Одновременно на основе статистического анализа компьютер оценивает вероятность v каждого из полученных решений. Он выстраивает решения в ряд по вероятности: наиболее вероятному решению приписывает вероятность v1 наиболее вероятному из оставшихся — вероятность v2 и т. д. Завершающий этап — вычисление отношения — ratio = v1/v2. Если ratio близко к единице, т.е. решения примерно равновероятны, то многозначность не разрешилась и наблюдения на данной базе следует повторить при более благоприятной геометрии наблюдений и большей длительности сессии.
При благоприятных условиях наблюдений случается, что ratio близко к сотне. В этом случае операторы уверены в успехе наблюдений, хотя окончательное решение принимают, проанализировав невязки замкнутых фигур, в соответствии с равенствами:
![]()
19.7. ОСНОВНЫЕ ИСТОЧНИКИ ОШИБОК СПУТНИКОВЫХ НАБЛЮДЕНИЙ
Ошибки исходных данных, т. е. координат спутников, обусловлены неточностью знания эфемерид спутников на момент наблюдений. Эта неточность эфемерид вызвана, в свою очередь, ошибками измерения параметров орбит спутников на станциях наземного комплекса управления и ошибками прогноза движения спутников из-за невозможности точного и полного учета всех возмущающих сил (гравитационного поля Земли, масс Луны и Солнца и др.). При использовании доступных для всех эфемерид ошибку координат спутника оценивают величиной порядка 10.,.20 м. Так как координаты спутника являются исходными для вычисления координат наземных пунктов, то при абсолютном методе определения последние не могут быть получены с меньшей ошибкой. При относительных же методах (геодезическом режиме) ошибки в координатах спутника практически не скажутся на точности определения разности координат наземных пунктов. Это объясняется тем, что при небольшом расстоянии между приемниками по сравнению с расстоянием от земной поверхности до спутника неточность координат спутника «внесет» в координаты обоих приемников практически одинаковую ошибку, которая будет исключена в разности координат.
Задержки сигнала в атмосфере. Атмосферу разделяют на три области: тропосферу, стратосферу и ионосферу. К тропосфере относится нижний слой от поверхности Земли до 10...15 км. Стратосфера — это слой в интервале от 10...15 до 50...60 км. Выше лежит ионосфера, верхняя граница которой простирается до 1000... 10 000 км.
Тропосфера и стратосфера — это неионизированные слои воздуха, поэтому закономерности распространения радиоволн в этих слоях считают одинаковыми, а задержку сигнала в них просто называют тропосферной задержкой.
В ионосфере газ ионизирован и содержит большое количество свободных электронов, поэтому для радиоволн она является диспергирующей средой — в ней показатель преломления п (а следовательно, и скорость распространения v = c/n) зависит от частоты сигнала.
Обе задержки
сигнала в атмосфере (в тропосфере и
ионосфере) вычисляют по формуле
Задержка в тропосфере. В тропосфере вместо показателя преломления п используют индекс преломления N, связанный с показателем соотношением N=(n-1)106. Так, если п = 1,000295, то N = 295. С использованием индекса преломления формула (19.14) применительно к тропосфере получает вид

Функция N(х) под знаком интеграла — это закон распределения индекса преломления вдоль трассы, который аппроксимируют моделью тропосферы, т. е. зависимостью индекса преломления от высоты слоя тропосферы.
Для учета наклона трассы используют выведенные теоретические зависимости индекса N(х) для зенитного расстояния z наблюдаемого объекта. В GPS, в частности, применяют модель Хопфилда.
Тропосферная
задержка, выраженная в линейной
размерности (т. е. величина![]() троп),
лежит в диапазоне от примерно 2,4 м при
z
= 0 (спутник
в зените) до 10м и более при z
=80°. При z>
80°, т. е. когда
угол возвышения над горизонтом меньше
10°, наблюдения не проводят. Существующие
тропосферные модели позволяют
наиболее полно учесть задержки сигнала
в атмосфере при дифференциальных и
относительных измерениях при длине
базы до 10...15 км. В этом случае атмосферные
условия для сигналов, приходящих от
спутника на оба приемника, считают
практически одинаковыми и остаточное
влияние тропосферы дает погрешность
в несколько сантиметров.
троп),
лежит в диапазоне от примерно 2,4 м при
z
= 0 (спутник
в зените) до 10м и более при z
=80°. При z>
80°, т. е. когда
угол возвышения над горизонтом меньше
10°, наблюдения не проводят. Существующие
тропосферные модели позволяют
наиболее полно учесть задержки сигнала
в атмосфере при дифференциальных и
относительных измерениях при длине
базы до 10...15 км. В этом случае атмосферные
условия для сигналов, приходящих от
спутника на оба приемника, считают
практически одинаковыми и остаточное
влияние тропосферы дает погрешность
в несколько сантиметров.
Задержка в ионосфере. Так как ионосфера для радиоволн является диспергирующей средой, в таких средах скорость распространения сигнала теряет свою однозначность, а поэтому возникает необходимость различать две скорости: фазовую и групповую.
При амплитудной
модуляции гармонического колебания
частоты f
возникает спектр шириной
![]() =
2F,
где F—
частота
модуляции. При этом можно считать, что
в среде с дисперсией несущее колебание
частоты f
распространяется
с фазовой скоростью, а огибающая,
воспроизводящая форму модулирующего
сигнала, распространяется с групповой
скоростью. Такая картина имеет место и
в случае распространения спутникового
сигнала в ионосфере. При фазовых
измерениях мы имеем дело с несущими
гармоническими колебаниями (на
частотах L1
и L2),
распространяющимися
с фазовыми скоростями, а поэтому при
расчете задержки в ионосфере в этом
случае должен иметь место фазовый
показатель преломления. При кодовых
измерениях участвуют кодовые сигналы,
которые модулируют
несущие
колебания, а значит, характеризуются
групповой скоростью распространения.
Поэтому в этом случае следует
использовать групповой показатель
преломления.
=
2F,
где F—
частота
модуляции. При этом можно считать, что
в среде с дисперсией несущее колебание
частоты f
распространяется
с фазовой скоростью, а огибающая,
воспроизводящая форму модулирующего
сигнала, распространяется с групповой
скоростью. Такая картина имеет место и
в случае распространения спутникового
сигнала в ионосфере. При фазовых
измерениях мы имеем дело с несущими
гармоническими колебаниями (на
частотах L1
и L2),
распространяющимися
с фазовыми скоростями, а поэтому при
расчете задержки в ионосфере в этом
случае должен иметь место фазовый
показатель преломления. При кодовых
измерениях участвуют кодовые сигналы,
которые модулируют
несущие
колебания, а значит, характеризуются
групповой скоростью распространения.
Поэтому в этом случае следует
использовать групповой показатель
преломления.
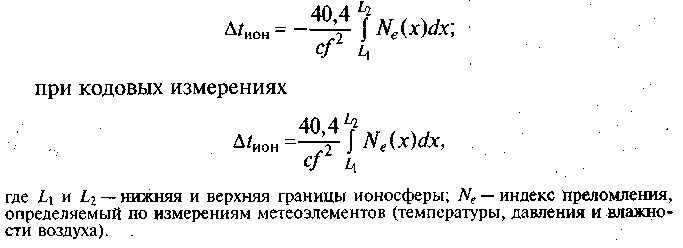
Для расчета задержек сигнала в ионосфере применяют следующие формулы:
при фазовых измерениях
Индекс преломления связан с показателем преломления соотношением
Ne=(n- 1)106.
Индекс преломления показывает, на сколько миллионных долей (единиц шестого знака) показатель преломления воздуха больше единицы. Так, если п = 1,000 315, то N= 315.
Из приведенных интегралов видно, что задержки в ионосфере одинаковы по значению, но различны по знаку. Это означает, что при кодовых измерениях время распространения сигнала в ионосфере увеличивается, а при фазовых уменьшается по сравнению с вакуумом.
Вычисление интегралов — сложная, а главное не поддающаяся точному решению задача. Для ее решения предложено несколько моделей, из которых наибольшее распространение получила модель Клобучара. Рассчитанные по этой модели поправки к псевдодальностям в линейной размерности составляют 5...50 м. Поэтому модельный способ учета поправок ионосферы применяют в основном в навигации при абсолютном методе определения координат, а в геодезии — на базах длиной до 10 км, когда ионосферные условия для радиоволн, приходящих на оба приемника, практически одинаковы. В этом случае даже измерения только на частоте L1 (с одночастотными приемниками) с использованием модельного учета дают приемлемые результаты. При точных геодезических измерениях применяют метод, базирующийся на использовании двух несущих частот L1 и L2, измерения на которых позволяют получить расстояние, свободное от влияния ионосферы. Для этой цели в спутниковом сигнале предусмотрена вторая несущая L2, и все высокочастотные приемники являются двухчастотными.
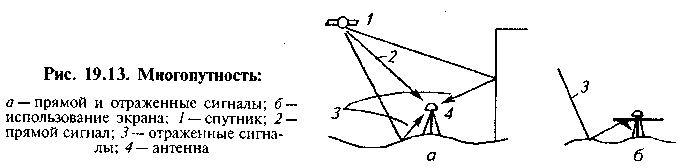
Отражение радиоволн. На антенну спутникового приемника может приходить не только прямой сигнал, но и отраженный от земной или водной поверхности и окружающих предметов (зданий, сооружений, заборов и т. п.). Прямой и отраженный сигналы проходят разные пути (рис. 19.13, а). В точке приема возникает их интерференция, приводящая к искажению прямого сигнала, а следовательно, к ошибкам измерений.
Для того чтобы отсечь лучи, отраженные от земной поверхности, в геодезических антеннах устанавливают специальные металлические экраны (рис. 19.3, б). Такой экран защищает только от «нижних» отраженных лучей и не снимает проблему отражений от близко расположенных высоких препятствий, когда отраженный сигнал приходит «сверху».
Геометрический фактор. От геометрии расположения созвездия наблюдаемых спутников зависит точность линейной засечки, определяемая понятием «геометрический фактор» (ГФ). В международной терминологии его обозначают аббревиатурой DOP (Dilution of Precision — падение точности). Если система характеризуется средней квадратической погрешностью измерения расстояния тизм, то погрешность определения местоположения
![]()
DOP не может быть меньше 1, но чем он меньше, тем лучше. Различают несколько видов DOP, характеризующих уменьшение точности в разных аспектах:
HDOP — снижение точности в плане (Horizontal DOP);
VDOP — снижение точности по высоте (Vertical DOP);
PDOP — снижение точности пространственного положения (Position DOP);
TDOP — снижение точности определения поправки часов (Tine DOP);
GDOP —общее снижение точности позиционирования (Geometrical DOP).
Геометрический фактор GDOP —наиболее универсальная характеристика, так как показывает понижение точности трехмерного позиционирования. Однако большинство пользователей предпочитает оценивать геометрию наблюдений величиной PDOP. Конфигурацию спутников считают хорошей, если PDOP не превышает 3, и удовлетворительной, если PDOP не больше 7.
Идеальная для спутниковых определений — конфигурация спутникового созвездия: один из спутников находится в зените, а остальные равномерно распределены по окружности с центром в определяемой точке так, что их возвышение над горизонтом составляет 20°. Ситуация, когда спутники сгруппированы в небольшой части неба («сбились в кучу»), является неблагоприятной.