

19.8. Система отсчета
Под системой отсчета подразумевают систему координат для определения места, где произошло событие, вместе со связанными с этой системой часами для фиксации момента времени, когда это событие произошло. При решении геодезических задач, связанных с наблюдениями ИСЗ, приходится пользоваться различными системами координат, отличающимися расположением начала, ориентировкой основной и начальной плоскостей, а также видом координатных систем.
Наиболее часто при обработке результатов наблюдений ИСЗ пользуются системами прямоугольных и эллипсоидальных координат. Среди прямоугольных координат можно выделить две основные группы: инерциальные координаты (невращающиеся), связанные с положением неподвижных звезд, и системы координат, жестко связанные с землей (вращающиеся системы координат).
Ориентировка инерциальных систем задается каталожными координатами звезд, получаемыми по астрономическим наблюдениям методами фундаментальной астронометрии.
Системы координат, связанные с Землей (обшеземные, референцные и др.), фиксируются координатами пунктов глобальных геодезических сетей на земной поверхности.
Связь между вращающимися и инерциальными системами координат устанавливается по данным различных специальных служб по наблюдениям звезд, радиоисточников и ИСЗ.
Международная служба вращения Земли (МСВЗ) определяет и ежегодно публикует данные и стандарты инерциальной и земной систем координат. Более подробно эти вопросы рассмотрены в учебниках по высшей и космической геодезии.
Рассмотрим некоторые системы координат.
Общеземная система координат. Эта система может быть прямоугольной декартовой или эллипсоидальной.
В прямоугольной системе начало координат совпадает с центром масс Земли (рис. 19.14). Ось Z совпадает с направлением из центра масс Земли в средний северный полюс [так называемое «Международное условное начало» (МУН)]. Ось X направлена в точку пересечения земного экватора и Гринвичского среднего меридиана. Ось Удополняет систему до правой (направлена на восток).
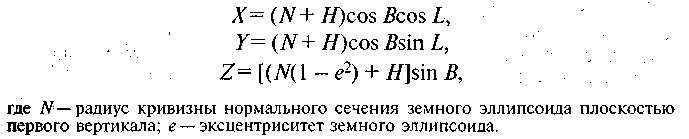
Прямоугольные пространственные координаты удобны для решения задач, связанных с обработкой наблюдений спутников при построении глобальных геодезических систем. При решении геодезических задач, связанных с определением положения точек земной поверхности, более наглядное представление дают геодезические эллипсоидальные координаты: В— геодезическая широта; L — геодезическая долгота; Н— геодезическая высота.
Прямоугольные координаты связаны с эллипсоидальными координатами следующими соотношениями:
В процессе наблюдений при работе с GPS-приемником опре-
д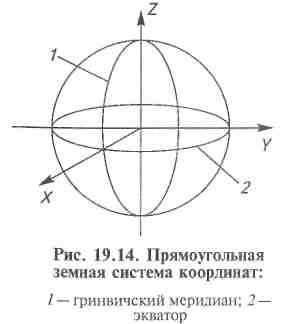 еляются
В, L,
H
координаты
в системе WGS-84,
которую можно считать общеземной. В
соответствии с рекомендациями
Международного астрономического
союза и Международного союза геодезии
и геофизики
еляются
В, L,
H
координаты
в системе WGS-84,
которую можно считать общеземной. В
соответствии с рекомендациями
Международного астрономического
союза и Международного союза геодезии
и геофизики
Референцная
система
координат. Близость поверхности
эллипсоида к поверхности геоида
(квазигеоида) оценивается по значениям
уклонений геоида от эллипсоида. В
качестве критерия принимают минимум
суммы квадратов уклонений т. е.
аномалий высоты квазигеоида, [![]() ]
= min.
]
= min.
Если параметры эллипсоида определяют с привлечением пунктов глобальной геодезической сети, то получают общеземной эллипсоид, например эллипсоид WGS-84.
Если параметры
эллипсоида подбирают для ограниченной
территории (с использованием пунктов
геодезической сети отдельно взятой
страны), то получают так называемый
референц-эллипсо-ид. В СССР в 1943 г. получен
эллипсоид Ф. Н. Красовского, параметры
которого используют и до настоящего
времени. В общем геодезическая
система координат определяется принятым
эллипсоидом
и характеризуется параметрами: большой
полуосью эллипсоида
а; геоцентрической
гравитационной постоянной
![]() =fM+
(f
- универсальная
гравитационная постоянная; М+
— масса
Земли); коэффициентом второй зональной
гармоники геопотенциала I2;
угловой
скоростью вращения Земли
=fM+
(f
- универсальная
гравитационная постоянная; М+
— масса
Земли); коэффициентом второй зональной
гармоники геопотенциала I2;
угловой
скоростью вращения Земли![]() .
.
Совокупность этих величин определяют полярное сжатие эллипсоида и соответственно размер его малой полуоси.
Таким образом, при задании систем координат устанавливают не только геометрические размеры земного эллипсоида, но и параметры гравитационного поля, а также астрономические постоянные.
Любая система координат, связанная с Землей, реализуется на практике значениями координат геодезических пунктов, которые принимают в качестве опорных при выполнении геодезических работ на местности.
Остановимся подробнее на особенностях геодезических работ, связанных с использованием современной GPS-аппаратуры.
Приступая к работе, геодезист располагает координатами геодезических пунктов, имеющихся на данном объекте. Именно этот набор координат практически должен реализовать исходную референцную систему координат. Однако процесс создания любой геодезической сети на такой огромной, как Государственная геодезическая сеть б. СССР, неизбежно сопровождается систематическими ошибками. Любой участок сети (локальная или региональная ее часть) имеет в этом смысле свои особенности, которые при современной точности измерений необходимо учитывать. Поэтому на каждом объекте приходится работать не в единой для всей страны референцной системе, а, по существу, в локальной или региональной системе, отличной от единой референцной системы координат.
Другая особенность применения GPS-аппаратуры — тот факт, что в ряде случаев точность измерений относительным методом точнее опорной геодезической сети. Например, вполне реальной становится ситуация, когда для получения координат пунктов GPS-сети, имеющей сантиметровую и даже миллиметровую точность, приходится использовать исходные пункты, координаты которых содержат дециметровые ошибки. Эти вопросы подлежат решению, единого правила для которого пока не установлено.
Преобразование геодезических координат. G PS-наблюдения позволяют получать результаты в WGS-84 системе координат. Геодезиста — потребителя продукции, как правило, интересуют данные в локальной (региональной) системе координат, фиксированной координатами опорных пунктов, расположенных на участке работ. В этой связи возникает проблема перехода от системы координат WGS-84 к локальной (региональной) системе координат. В этом состоит проблема преобразования или трансформирования координат.
Как правило, начала рассматриваемых систем координат не совпадают, имеет место различие в ориентировке осей систем координат, существует разница в масштабах осей, созданных наземными и спутниковыми методами.
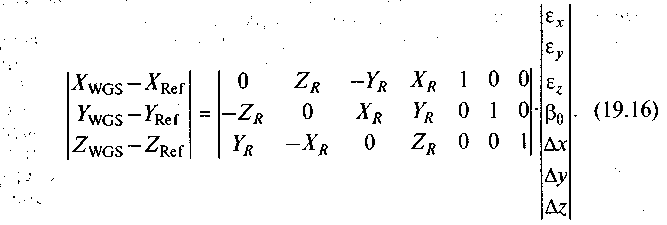
Если воспользоваться углами Кардано для фиксации взаимной ориентировки координатных осей, то связь между ними определится выражением
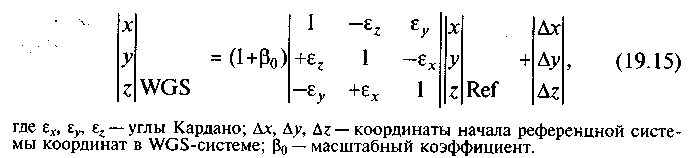
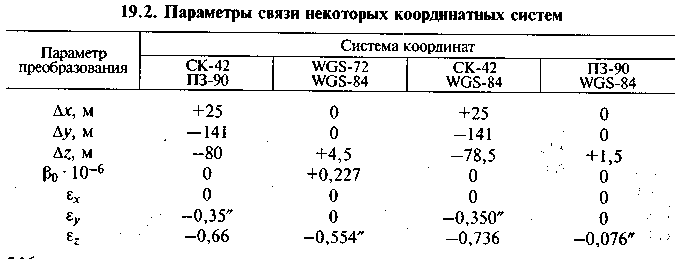
Таким образом, чтобы выполнить трехмерное преобразование координат, необходимо знать семь параметров: три параметра сдвига, три параметра поворота, один масштабный коэффициент. Параметры связи некоторых координатных систем приведены в таблице 19.2. Для этого необходимо иметь не менее семи уравнений типа (19.15), включающих семь неизвестных параметров трансформирования. Четыре пункта с известными в референцной системе координатами образуют три независимые базы, порождающие девять уравнений. Два уравнения являются избыточными. Это означает, что необходимо выполнить спутниковые наблюдения на четырех пунктах, координаты которых известны в региональной или локальной системах координат. Такое трехмерное трансформирование используют в больших сетях, размеры которых исчисляют тысячами километров.
Систему параметрических уравнений для решения задачи по определению параметров преобразования координат можно записать в виде
В геодезических сетях меньших размеров применяют двумерное трансформирование. Именно двумерное трансформирование наиболее часто встречается на практике. Первоначально трехмерный вектор базы редуцируют на плоскость геодезической проекции, например на плоскость проекции Гаусса—Крюгера. В этом случае имеем четыре параметра трансформирования: два параметра сдвига начала координат, один угловой параметр вращения и масштабный фактор. Четыре пункта с известными в референцной системе координатами образуют три независимых базы, порождающие четыре уравнения с четырьмя неизвестными параметрами трансформирования.
На практике редко определяют угловой параметр вращения и масштабный фактор. Определяют только два параметра сдвига начала координат. Один из трех исходных пунктов выбирают в качестве главного, фиксирующего региональную или локальную систему координат. Как правило, такой пункт расположен близко к центру геодезической сети. Остальные два исходных пункта нужны для того, чтобы проконтролировать точность координат главного исходного пункта.
В эллипсоидальных геодезических системах координат использована H-геодезическая высота. По определению H есть расстояние пункта до эллипсоида, измеряемое по нормали, проведенной
от пункта к
поверхности эллипсоида. Геодезическая
высота H
состоит из двух частей: H
=
![]() +
+![]() ,
,
при этом первая составная часть получается из геометрического нивелирования и быстро изменяется в зависимости от рельефа местности. Вторая составная часть — аномалия высоты, т. е. высота отсчетной для нивелирования поверхности над поверхностью эллипсоида. Это так называемая геоидальная часть геодезической высоты; она плавно изменяется и зависит от аномалий гравитационного поля.
Нивелирные высоты могут различаться в зависимости от правил учета в них гравиметрических поправок.
Различают
систему
нормальных нивелирных высот, обозначаемых
![]() .
Это высота
пункта над отсчетной поверхностью, так
называемой поверхностью квазигеоида,
который строго определяется по
измерениям на физической поверхности
Земли.
.
Это высота
пункта над отсчетной поверхностью, так
называемой поверхностью квазигеоида,
который строго определяется по
измерениям на физической поверхности
Земли.
Система нормальных высот используется в РФ, странах СНГ и некоторых странах Восточной и Западной Европы. На отечественных картах указаны нормальные высоты.
Система
ортометрических высот также
широко используется во
всем мире. Обозначаются ортометрические
нивелирные высоты
![]() .
Высота
— это высота
пункта над поверхностью геоида. Геоид
не может быть определен строго по
измерениям на поверхности Земли. Для
определения фигуры геоида необходимо
знать плотность масс, расположенных
между геоидом и физической поверхностью
Земли, что практически является
трудноразрешимой задачей, поэтому
точное определение фигуры геоида
невозможно.
.
Высота
— это высота
пункта над поверхностью геоида. Геоид
не может быть определен строго по
измерениям на поверхности Земли. Для
определения фигуры геоида необходимо
знать плотность масс, расположенных
между геоидом и физической поверхностью
Земли, что практически является
трудноразрешимой задачей, поэтому
точное определение фигуры геоида
невозможно.
Поверхности геоида и квазигеоида на морях и океанах совпадают, а в равнинной местности расходятся в пределах 2...3 см. В горных районах расстояния между ними могут достигать 2...3 м. Более подробно этот вопрос рассматривают в курсах высшей геодезии.
Равноденственные (звездные) системы координат. Положение внешней точки пространства (например, ИСЗ) относительно Земли удобно задавать в геоцентрической равноденственной прямоугольной системе координат. Начало системы координат совмещают с центром масс Земли, ось Z направлена вдоль оси вращения Земли (в полюс Мира), ось X— в точку весеннего равноденствия , ось Y дополняет систему до правой тройки векторов.
Наряду с геоцентрической системой координат используют также топоцентрическую равноденственную систему, отличающуюся от геоцентрической системы только положением начала, которое располагается в точке земной поверхности; оси топоцентрической системы параллельны соответствующим осям геоцентрической системы координат.
Равноденственные системы координат, определенные ранее, не являются инерциальными, поскольку ориентировка оси вращения Земли (оси Мира) и положение точки весеннего равноденствия с течением времени меняется вследствие гравитационного воздействия на Землю со стороны Луны, Солнца и планет Солнечной системы. Выделяют истинные и средние равноденственные координатные системы. Переход от истинных к средним равноденственным координатам связан с учетом астрономических явлений прецессии и нутации. Подробно с этими вопросами можно ознакомиться в курсе сферической астрономии.
система координат. Спутники вращаются вокруг Земли по эллиптическим орбитам, близким к окружностям, но форма эллипса и его ориентация в пространстве с течением времени меняются. Мгновенную орбиту (орбиту в некоторый момент времени) называют оскулирующей.
С орбитой связана орбитальная система координат, представляющая собой плоскую прямоугольную декартовую систему, показанную на рисунке 19.15. Начало 0 орбитальной системы координат совпадает с центром масс Земли. Оси х0 и у0 лежат в плоскости орбиты. Большая полуось а и малая полуось b эллиптической орбиты характеризуют ее размеры и форму. Практически используют большую полуось а и эксцентриситет
![]()
Плоскость орбиты
пересекается с плоскостью экватора по
линии
![]() ,
которую
называют линией узлов. Точку
,
которую
называют линией узлов. Точку
![]() ,
в
которой спутник
пересекает плоскость экватора, переходя
из Южного полушария в Северное,
называют восходящим узлом орбиты.
Противоположная точка
,
в
которой спутник
пересекает плоскость экватора, переходя
из Южного полушария в Северное,
называют восходящим узлом орбиты.
Противоположная точка
![]() —
нисходящий узел. Ось х0
проходит через восходящий узел. Ось
у0
перпендикулярна
оси х0
и лежит в плоскости орбиты.
—
нисходящий узел. Ось х0
проходит через восходящий узел. Ось
у0
перпендикулярна
оси х0
и лежит в плоскости орбиты.
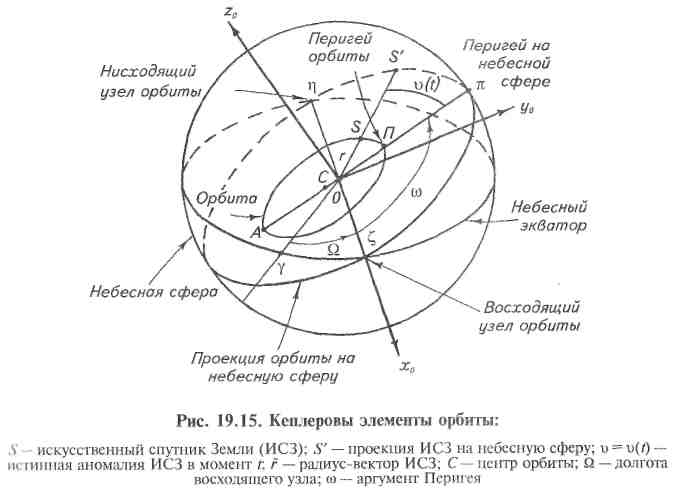
Определим остальные
параметры, характеризующие ориентировку
орбиты в пространстве и положение
спутника на орбите. Плоскость орбиты
образует с плоскостью экватора угол i
— угол наклона орбиты. Второй угловой
параметр, задающий ориентацию
орбиты в экваториальной системе
координат,
![]() —
угол между направлением в точку весеннего
равноденствия и осью х0
— долгота восходящего узла орбиты.
И третий угловой параметр
—
угол между направлением в точку весеннего
равноденствия и осью х0
— долгота восходящего узла орбиты.
И третий угловой параметр
![]() —
аргумент
перигея. Перигей — ближайшая к центру
масс Земли точка орбиты. Положение
спутника на орбите в некоторый момент
t
характеризуют
истинной аномалией
.
Сумму аргумента перигея и истинную
аномалию называют аргументом широты:
и =
со + и. Используют и другие параметры,
характеризующие орбиту и положение
спутника на ней. Элементы, характеризующие
орбитальное движение спутника на
исходную эпоху, в совокупности с
параметрами, определяющими изменения
этих элементов с течением времени,
являются основой для составления
эфемерид спутника. Пользуясь эфемеридами
спутника, можно вычислить орбитальные
координаты х0
и
у0
по формулам:
—
аргумент
перигея. Перигей — ближайшая к центру
масс Земли точка орбиты. Положение
спутника на орбите в некоторый момент
t
характеризуют
истинной аномалией
.
Сумму аргумента перигея и истинную
аномалию называют аргументом широты:
и =
со + и. Используют и другие параметры,
характеризующие орбиту и положение
спутника на ней. Элементы, характеризующие
орбитальное движение спутника на
исходную эпоху, в совокупности с
параметрами, определяющими изменения
этих элементов с течением времени,
являются основой для составления
эфемерид спутника. Пользуясь эфемеридами
спутника, можно вычислить орбитальные
координаты х0
и
у0
по формулам:
х0
=![]() ;
у0
=
;
у0
=
![]() и,
и,
где r—расстояние от центра масс Земли до мгновенного положения спутника на орбите.
Каждый спутник GPS транслирует данные для получения эфемерид в составе навигационного спутникового сообщения. Эфемеридами любого космического объекта (звезды, ИСЗ) называют таблицы, в которых на определенные, обычно равноотстоящие, моменты даны координаты этого объекта.
Шкалы времени. Все способы измерения дальностей (псевдодальностей) основаны на определении времени прохождения радиоволн от спутника до приемника. На каждом спутнике системы GPS установлено по несколько атомных стандартов частоты, одновременно являющихся генераторами шкал времени. С их помощью генерируются электромагнитные колебания с относительной нестабильностью за сутки около 10-13. Передаваемые радиосигналы несут метки времени, по которым на Земле на станциях службы времени сверяют временные шкалы системы GPS с государственными эталонами времени и частоты.
В основе измерений физического времени лежит атомное время AT. Существует Международное атомное время TAI. Единицей атомного времени является атомная секунда — интервал времени близкий к 1/86 400 части суток. Шкала атомного времени обладает высокой равномерностью (10-13). Она постепенно расходится со шкалой Всемирного астрономического времени UT (Universal Time), соответствующей шкале среднего солнечного времени Гринвичского меридиана, которая задается суточным вращением Земли. Различают три системы всемирного времени:
UTO — всемирное время, непосредственно получаемое из астрономических наблюдений суточных движений звезд, т. е. время на мгновенном гринвичском меридиане, положение которого определено мгновенными положениями полюсов Земли;
UT1 — всемирное время среднего гринвичского меридиана, определяемого средними положениями полюсов Земли; его получают исправлением UTO поправкой за движением мгновенного полюса Земли относительно Международного условного начала (МУН).
UT2 — всемирное время среднего гринвичского меридиана, исправленное поправками за сезонные вариации угловой скорости вращения Земли.
Поскольку шкалы AT и UT автономны и между собой не согласуются, введена промежуточная шкала так называемого Всемирного координированного времени UTC. В России UTC соответствует Государственному эталону частоты и времени РФ. Это атомное (физическое) время, которое смещается на 1 с, когда показания часов UTC отличаются от UT1 более чем на 0,7 с. Коррекцию его выполняют по мере надобности либо в полдень после последней секунды полугодия 30 июня или в конце 31 декабря. Так, в результате коррекции в 1996 г. расхождение между UTC и UT1 уменьшилось до 1 мс.
Время GPS (GPST) было установлено в полночь с 5-го на 6-е января 1980 г. и составило на 19 с меньше времени ТАГ В ноябре 1985 г. GPST = UTC + 4 с. В июне 1993 г. GPST опережало UTC на 9 с, в июле 1994 г. — на 10 с.
В спутниковых сигналах GPS время передается в форме номера недели и поправки времени для каждой «GPS недели». Номера недель исчисляются от 0 до 1023. Неделя с номером 0 была начата 6 января 1980 г. Неделя с номером 1023 закончилась 21 августа 1999 г. После этого номер недели был переведен на 0 и счет начался сначала.
В приемнике пользователя атомных стандартов частоты нет. Устанавливать их там было бы слишком дорого, поэтому сдвиг шкалы времени кварцевых часов в спутниковом приемнике может быть на несколько порядков больше, чем атомных часов на спутнике. Однако этот сдвиг практически одинаков по отношению к измерениям псевдодальностей до всех наблюдаемых в данный момент спутников. Это почти постоянная систематическая погрешность. Ее можно исключить, если измерять псевдодальности как минимум с 4 спутников. Четыре измерения позволяют вычислить четыре параметра — три координаты, определяющие положение приемника в земном пространстве, и сдвиг шкалы времени в приемнике при условии его постоянства.
Если наблюдение ИСЗ растянуто во времени, то относительный сдвиг шкал времени (школа GPS и шкала приемника) будет меняться. Отсюда возникают требования к стабильности временной шкалы приемника, которая должна обеспечивать минимальное изменение сдвига шкал за интервал наблюдений ИСЗ.
1 9.9.
АППАРАТУРА ПОЛЬЗОВАТЕЛЕЙ
9.9.
АППАРАТУРА ПОЛЬЗОВАТЕЛЕЙ
Комплект аппаратуры. Комплектация и технические характеристики аппаратуры пользователей зависят от решаемых задач. В простейшем случае — это миниатюрный приемник по размерам не больше наручных часов. Чем точнее работы, тем сложнее аппаратура. Наиболее совершенные приемники применяют в геодезических целях. Комплект аппаратуры для геодезических целей включает антенну, приемник, контроллер (управляющее устройство), блок питания (для зарядки аккумуляторов и работы от сети), аккумуляторы или батареи, кабели, штативы, веху для установки антенны, рулетку или специальное приспособление для измерения высоты антенны, станковый рюкзак для приемника, упаковочные сумки, чехлы и прочее оснащение. Для обработки измерений обязателен персональный компьютер с программным обеспечением. Антенну можно встроить в приемник или использовать в виде выносного модуля, соединяемого с ним специальным кабелем. Общий вид геодезического приемника Trimble 4600 показан на рисунке 19.16.

Все приемники являются многоканальными с числом каналов от 6 и более. Каждый канал следит за своим спутником. Поскольку при измерениях серьезной проблемой является срыв сигналов в тени зданий и других объектов, то эти трудности легче преодолеть, если выполнять измерения многоканальными приемниками: чем больше каналов, тем легче найти необходимое число видимых спутников и избежать срывов.
Приемники можно разделить:
на односистемные, принимающие сигналы только GPS;
двухсистемные, принимающие сигналы как ГЛОНАСС, так и GPS.
По видам принимаемых и обрабатываемых сигналов приемники делят:
на кодовые одночастотные, работающие по С/А-коду;
кодовые двухчастотные, ориентированные прежде всего на Р-код;
кодово-фазовые одночастнотные, применяющие дальномерный С/А-код и фазовые измерения только на частоте L1;
кодово-фазовые двухчастотные, использующие дальномерные коды и фазовые измерения на частотах L1 и L2.
Максимальную точность обеспечивают двухчастотные приемники (погрешность измерений составляет сантиметры и даже миллиметры). Вместе с тем и одночастотные приемники благодаря применению относительного метода измерений и совершенной методики обработки позволяют получить высокую точность.
Кодовые приемники (рис. 19.17) легки, компактны, умещаются на ладони. В одном корпусе совмещены все блоки (антенна, сам приемник, питание). Кроме определения трехмерного положения, как правило, вычисляют скорость и направление движения. Выдают координаты в разных форматах (широта, долгота, высота, плоские координаты в разных проекциях и др.). После снятия режима SA (селективного доступа) кодовые приемники стали основными приборами для определения места в различных географических, геологических и других работах.
Кодово-фазовые приемники малогабаритны, обычно оснащены отдельной антенной, имеют мощные накопители данных. В некоторых конструкциях внутренняя память до 100 Мб и более, а число каналов достигает 40.
Все они снабжены портами для интеграции с другой аппаратурой, питаются в основном от аккумуляторов. Нередко клавиатура с дисплеем установлена на вспомогательном устройстве — контроллере, которое пользователь держит в руке, при измерениях вводит необходимые команды (имя точки, высота антенны и др.).
Кодово-фазовые приемники выполняют следующие основные функции:
генерирование местных эталонных колебаний, несущих частот и дальномерных кодов;
поиск, захват, усиление и разделение сигналов от разных спутников;
регистрацию сигналов;
фильтрацию сигналов для ослабления помех;
детектирование сигналов для выделения меток времени, кодовых посылок, навигационного сообщения и несущих колебаний;
слежение за частотой, фазой, кодовыми сигналами, измерение времени и разности фаз при кодовых и фазовых измерениях.
При включении питания в приемнике устанавливают стартовое меню, позволяющее пользователю выбрать нужный режим измерений. При поступлении сигнала от спутника и наличии альманаха, хранящегося в памяти приемника, производится идентификация спутника, и приемник начинает захват сигнала. Захват сигнала — это вхождение в синхронизм по фазе псевдослучайного кода, т. е. совпадение местной ПСП с поступающей от спутника. В дальнейшем приемник поддерживает режим отслеживания захваченных сигналов и позволяет периодически брать отсчеты, фиксирующие вычисленные псевдодальности и точное время.
Приемник обладает системой автоматизированного управления, которая позволяет обрабатывать поток получаемой информации, производить вычислительные операции, показывать на дисплее интересующие оператора данные, выполнять самодиагностику работы приемника и др. Все это возможно благодаря соответствующему программному обеспечению, которое имеет исключительно важное значение в любом спутниковом приемнике. При этом наблюдается тенденция к уменьшению массы и габаритов приемника, конструктивному объединению отдельных частей комплекта аппаратуры и максимальному упрощению органов управления. Такие приемники образуют новое поколение, получившее название приемники класса «все в одном».
В мире производством спутниковых приемников заняты более 400 фирм. В России получили распространение приемники фирм Ashteck, Trimble, Magellan (США), Leica (Швейцария), Z-Max, ProMark (Франция), Geotronics AB (Швеция), Торсоп (Япония) и др.
При участии фирмы Ashteck в России разработан 12-канальный одночастотный приемник «Землемер».
Появились совмещенные GPS/ГЛОНАСС приемники: Trimble 4000 SGL, Ashteck GG-24, JGG 20 и др.
В результате объединения компании JPS (Javad Positioning System) с японской корпорацией Торсоп создается новая компания TPS (Торсоп Positioning System), которая начинает выпускать приемники нового поколения с усовершенствованной технологией.
Начали создавать интегрированные системы, одной из составных частей которых является спутниковый приемник. Так, шведская фирма Spectra Precision выпустила модульную геодезическую систему Geodimeter Integrated Surveying System, объединяющую тахеометр, спутниковый приемник и полевой пен-компьютер (компьютер, в котором клавиатуру заменяет «световое перо», позволяющее рисовать и чертить от руки прямо на экране).
19.10. СПОСОБЫ И РЕЖИМЫ НАБЛЮДЕНИЙ
Способы наблюдений разделяют на абсолютные и относительные (см. раздел 19.3). При абсолютных способах определяют координаты пунктов, а при относительных — приращения (разности) координат или вектор базы между двумя пунктами.
Абсолютные способы делят на автономные (когда измерения производят одним приемником) и дифференциальные [с использованием базовой станции, передающей на «рабочий» (мобильный) приемник дифференциальные поправки]. При абсолютных способах выполняют кодовые измерения, а при относительных — фазовые (кодовые в этом случае выполняют вспомогательные функции для нахождения приближенных значений координат и разрешения неоднозначности).
Относительные способы — наиболее точные, и применяют их для геодезических целей.
Существует несколько геодезических режимов, все их делят на две группы: статические и кинематические. В обоих режимах один из приемников находится на исходном пункте, а другой — на определяемом, но в статике оба приемника неподвижны, а в кинематике «определяющийся» (мобильный) приемник перемещается (непрерывно или с остановками).
Статика. Статический режим — наиболее точный и требующий больших (не менее 1,5 ч) затрат времени на наблюдения. Его используют для создания точных геодезических сетей. Значительная продолжительность наблюдений необходима для уверенного разрешения неоднозначности и получения результатов измерений с сантиметровой и даже миллиметровой точностью. При этом дополнительное время (не менее получаса на каждый пункт) необходимо на обработку результатов измерений в камеральных условиях — постобработку.
Быстрая статика — статический режим, при котором время наблюдений на пункте сокращается до 10... 15 мин. Платой за экономию времени является риск столкнуться с трудностями разрешения неоднозначности на этапе постобработки.
Кинематика. Классический вариант кинематического режима — режим stop and go («стой и иди»), при котором движущийся приемник —ровер (rover — скиталец) перемещают с пункта на пункт, делая на этих пунктах остановки. Однако, чтобы реализовать такой режим, работу начинают со статического варианта, выполнив — инициализацию — наблюдения длительностью 1...1,5ч для определения вектора базы и разрешения неоднозначности. При этом референцный (неподвижный) приемник устанавливают на исходном пункте, а роверный — на первом из определяемых пунктов (эти пункты и образуют базу). После выполнения инициализации оператор роверного приемника переключает его в режим движения и начинает движение к следующему пункту. При этом двигаться нужно так, чтобы на антенну поступали сигналы не менее чем от четырех одних и тех же спутников. В случае срыва сигнала возвращаются на предыдущий пункт. Если срыва не происходит, то, прибыв на очередной пункт, устанавливают антенну над ним и переключают приемник в статический режим, который продолжается меньше 1 мин; за это время измеряют высоту антенны и вводят ее в приемник (а также вводят название пункта). На этом работа на пункте заканчивается, оператор переключает приемник в роверный режим и движется к следующему пункту. Короткое время наблюдений на пункте обусловлено тем, что не требуется разрешать неоднозначность на каждом пункте, так как, определив число N0 при инициализации на базе, приемник при перемещении непрерывно отслеживает его изменения счетом фазовых циклов, если только не потерян сигнал от спутника из числа четырех необходимых.
Кинематика «в п о л е т е» (on the fly — OTF). Это вариант кинематического режима, не требующий инициализации Его используют в том случае, когда есть уверенность, что прием сиг-?iP°™ Достаточного числа спутников не прервется в течение 20...30 мин. За это время при непрерывной работе приемника он накопит достаточно информации для того, чтобы программное обеспечение при постобработке смогло разрешить неоднозначность.
Общий недостаток всех перечисленных способов наблюдений — необходимость постобработки в камеральных условиях.
Кинематика в реальном времени (Real Time Kinematics—RTK). Этот метод является дальнейшим развитием кинематического режима. Сущность его состоит в том, что измерения и обработка производятся одновременно. Для'этой цели между референцным (опорным) и роверным (мобильным) приемниками организуется цифровой радиоканал (в оба приемника вводятся соответствующие радиомодемы), по которому роверный приемник получает от референцного всю необходимую информацию, чтобы тут же ее обработать совместно с результатами своих фазовых измерений и определить свои координаты с сантиметровой точностью. При этом не требуется никакой постобработки.
19.11. ПЛАНИРОВАНИЕ НАБЛЮДЕНИЙ
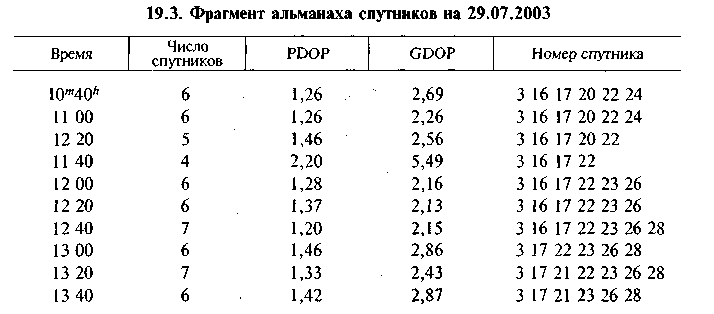
Цель планирования наблюдений — определение оптимального интервала времени для наблюдений на данном объекте — оптимального в том смысле, что в этом интервале в зоне радиовидимости приемника будет находиться достаточное число спутников и их конфигурация обеспечит PDOP, близкий к единице.
Особенность такого планирования заключается в том, что оно включает не только сбор традиционной информации из разных источников (картографические материалы, данные рекогносцировки о характере местности, препятствиях и т. п.), но и получение альманаха созвездия спутников (число спутников, значения PDOP для данного интервала времени и др.) при помощи программного обеспечения спутникового приемника. В качестве примера в таблице 19.3 приведен фрагмент альманаха спутников.
Кроме того, может быть составлена диаграмма видимых положений спутников на небесной сфере в некоторый задаваемый интервал времени (рис. 19.18).

Рис. 19.18. Пример диаграммы видимых положений и траекторий движения спутников на небесной сфере (цифрами обозначены номера спутников)