

4.4.2. Конструкции измерительных механизмов
В ферродинамическом ИМ можно выделить три основных элемента: катушку возбуждения, магнитопровод и подвижную часть. Форма катушки возбуждения и их количество, конфигурация магнитопровода и его отдельных элементов, конструкция и число обмоток подвижной части определяются схемой и целевым назначением прибора, видом измеряемой величины и требуемыми метрологическими характеристиками. Далее приведено несколько конструкций ферродинамических ИМ.
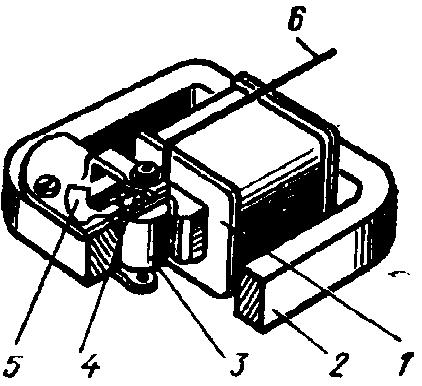
Рис. 4.19. Измерительный механизм с углом шкалы 90°
На рис. 4.19 представлен ИМ, применяемый в амперметрах, вольтметрах и однофазных ваттметрах с углом шкалы 80 – 90 градусов. Катушка возбуждения 1 охватывает средний стержень магнитопровода 2, который обычно набирают из отдельных электрически изолированных пластин электротехнической стали или изготавливают методом спекания ферродинамитных порошков. Пластины стягивают в пакет шпильками или заклепками, применяя для этого материалы с низкой электропроводностью, например манганин. Сердечник 3 также набирают из отдельных пластин; иногда, особенно в приборах, предназначенных для работы в сетях промышленной частоты 50 Гц, его изготавливают из сплошного прута. Сердечник охватывается подвижной рамкой 4 с укрепленным на ней сектором 5 магнитного успокоителя и стрелкой 6. В щитовых приборах широко применяются конструкции с большим углом поворота подвижной части – в пределах 230 – 260 градусов (Рис.4.20). Магнитная система такого типа ИМ, приведенная на рис.4.20,а состоит из двух основных элементов: S – образного сердечника 1 и внешнего магнитопровода 2 полукольцевой формы. Между частями магнитопровода обычно оставляют зазор 5, изменением которого можно регулировать величину отклонения подвижной части. Увеличивая этот зазор снижают индукцию на рабочем участке 3 магнитной системы и, следовательно, уменьшают угол поворота указателя.


Рис. 4.20. Магнитная система (а) и внешний вид ИМ (б)
с углом шкалы 240
Относительное смещение частей магнитопровода можно использовать также для корректирования в некоторых пределах характера шкалы. Катушка возбуждения 4 размещается на выступе магнитопровода 2. На оси подвижной части (Рис.4.20,б) закреплены рамка 6, стрела 9 и сектор магнитного успокоителя 10. Подвижная часть вращается в опорах 8: держателем одной из опор служит кольцевой мостик 11. Начальное или нулевое положение подвижной части регулируется корректором 7.
В малогабаритных механизмах (Рис. 4.21) катушку возбуждения 4 размещают в пазах цилиндрического сердечника 1 с воздушным зазором 3, замыкая магнитную цепь кольцевым ярмом 2. Такая конструкция отличается малой потребляемой мощностью (порядка 1ВА), имеет незначительное рассеяние и высокий уровень защищенности от внешних магнитных полей.

Рис. 4.21. Измерительный механизм с внутрирамочной
катушкой возбуждения
Несмотря на перечисленные преимущества, данная конструкция не применяется в серийных приборах. Причина этого – в трудностях сборки магнитной системы и особенно в сложности регулирования магнитной индукции в рабочем зазоре. Индукцию модно изменять, например, смещая кольцевой магнитопровод по вертикали, но это требует значительного усложнения конструкции ИМ.
В трехфазных двухэлементных ваттметрах применяют ИМ, показанный на рис. 4.22. Он состоит из двух катушек возбуждения 1 и 2, магнитные потоки которых взаимодействуют с магнитными потоками подвижных катушек 3 и 5, вращающихся вокруг оси 4.

Рис. 4.22. Измерительный механизм с двумя рамками